3.扩散模型探索:DDIM 笔记与思考
DIFFUSION系列笔记|DDIM 数学、思考与 ppdiffuser 代码探索
论文:DENOISING DIFFUSION IMPLICIT MODELS
该 notebook 主要对 DDIM 论文中的公式进行小白推导,同时笔者将使用 ppdiffusers 中的 DDIM 与 DDPM 探索两者之间的联系。读者能够对论文中的大部分公式如何得来,用在了什么地方有初
步的了解。
提示:由于 DDIM 主要基于 DDPM 提出,因此本文章将省略部分 DDPM 中介绍过的基础内容,包括基于马尔科夫链的 Forward Process, Reverse Porcess 及扩散模型训练目标等相关知识。建议读者可以参考 扩散模型探索:DDPM 笔记与思考 或者其他相关文章,初步了解 DDPM 后再继续阅读本文。
V100 16G 配置运行过程中可能出现 Kernel 问题,请尝试使用 V100 32G 配置。
本文将包括以下部分:
- 总结 DDIM。
- Non-Markovian Forward Processes: 从 DDPM 出发,记录论文中公式推导
- 探索与思考:
- 验证当 η = 1 \eta=1 η=1 DDIMScheduler 的结果与 DDPMScheduler 基本相同。
- DDIM 的加速采样过程
- DDIM 采样的确定性
- INTERPOLATION IN DETERMINISTIC GENERATIVE PROCESSES
DDIM 总览
- 不同于 DDPM 基于马尔可夫的 Forward Process,DDIM 提出了 NON-MARKOVIAN FForward Processes。(见 Forward Process)
- 基于这一假设,DDIM 推导出了相比于 DDPM 更快的采样过程。(见探索与思考)
- 相比于 DDPM,DDIM 的采样是确定的,即给定了同样的初始噪声 x t x_t xt,DDIM 能够生成相同的结果 x 0 x_0 x0。(见探索与思考)
- DDIM和DDPM的训练方法相同,因此在 DDPM 基础上加上 DDIM 采样方案即可。(见探索与思考)
Forward process
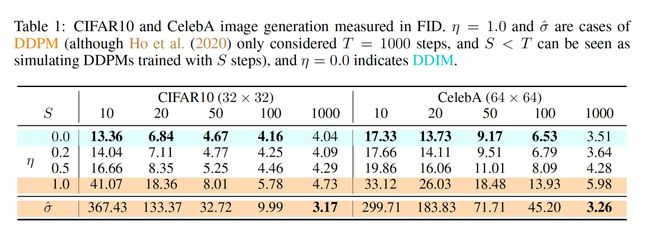
DDIM 论文中公式的符号与 DDPM 不相同,如 DDIM 论文中的 α \alpha α 相当于 DDPM 中的 α ˉ \bar\alpha αˉ,而 DDPM 中的 α t \alpha_t αt 则在 DDIM 中记成 α t α t − 1 \frac {\alpha_t}{\alpha_{t-1}} αt−1αt ,但是运算思路一致,如DDIM 论文中的公式 ( 1 ) − ( 5 ) (1)-(5) (1)−(5) 都在 DDPM 中能找到对应公式。
以下我们统一采用 DDPM 中的符号进行标记。即 α ˉ t = α 1 α 2 . . . α t \bar\alpha_t = \alpha_1\alpha_2...\alpha_t αˉt=α1α2...αt
在 DDPM 笔记 扩散模型探索:DDPM 笔记与思考 中,我们总结了 DDPM 的采样公式推导过程为:
x t → m o d e l ϵ θ ( x t , t ) → P ( x t ∣ x 0 ) → P ( x 0 ∣ x t , ϵ θ ) x ^ 0 ( x t , ϵ θ ) → 推导 μ ( x t , x ^ 0 ) , β t → P ( x t − 1 ∣ x t , x 0 ) x ^ t − 1 x_t\xrightarrow{model} \epsilon_\theta(x_t,t) \xrightarrow {P(x_t|x_0)\rightarrow P(x_0|x_t,\epsilon_\theta)}\hat x_0(x_t, \epsilon_\theta) \xrightarrow {推导}\mu(x_t, \hat x_0),\beta_t\xrightarrow{P(x_{t-1}|x_t, x_0)}\hat x_{t-1} xtmodelϵθ(xt,t)P(xt∣x0)→P(x0∣xt,ϵθ)x^0(xt,ϵθ)推导μ(xt,x^0),βtP(xt−1∣xt,x0)x^t−1
而后我们用 x ^ t − 1 \hat x_{t-1} x^t−1 来近似 x t − 1 x_{t-1} xt−1,从而一步步实现采样的过程。不难发现 DDPM 采样和优化损失函数过程中,并没有使用到 p ( x t − 1 ∣ x t ) p(x_{t-1}|x_t) p(xt−1∣xt) 的信息。因此 DDIM 从一个更大的角度,大胆地将 Forward Process 方式更换了以下式子(对应 DDIM 论文公式 ( 7 ) (7) (7)):
q σ ( x t − 1 ∣ x t , x 0 ) = N ( x t − 1 ; α ˉ t − 1 x 0 + 1 − α ˉ t − 1 − σ t 2 x t − α ˉ t x 0 1 − α ˉ t , σ t 2 I ) (1) q_\sigma\left(\mathbf{x}_{t-1} \mid \mathbf{x}_t, \mathbf{x}_0\right)=\mathcal{N}\left(\mathbf{x}_{t-1} ; \sqrt{\bar\alpha_{t-1}} \mathbf{x}_0+\sqrt{1-\bar\alpha_{t-1}-\sigma_t^2} \frac{\mathbf{x}_t-\sqrt{\bar\alpha_t} \mathbf{x}_0}{\sqrt{1-\bar\alpha_t}}, \sigma_t^2 \mathbf{I}\right)\tag1 qσ(xt−1∣xt,x0)=N(xt−1;αˉt−1x0+1−αˉt−1−σt21−αˉtxt−αˉtx0,σt2I)(1)
论文作者提到了 ( 1 ) (1) (1) 式这样的 non-Markovian Forward Process 满足 :
q ( x t ∣ x 0 ) = N ( x t ; α ˉ t x 0 , ( 1 − α ˉ t ) I ) , α ˉ t = ∏ T α t (2) q(x_t|x_0) =N (x_t; \sqrt {\bar \alpha_t} x_0, (1-\bar\alpha_t)I),\bar \alpha_t=\prod_T\alpha_t\tag 2 q(xt∣x0)=N(xt;αˉtx0,(1−αˉt)I),αˉt=T∏αt(2)
公式 ( 1 ) (1) (1) 能够通过贝叶斯公式:
q ( x t ∣ x t − 1 , x 0 ) = q ( x t − 1 ∣ x t , x 0 ) q ( x t ∣ x 0 ) q ( x t − 1 ∣ x 0 ) (3) q(x_t|x_{t-1},x_0) = \frac{q(x_{t-1}|x_t,x_0)q(x_t|x_0)}{q(x_{t-1}|x_0)}\tag 3 q(xt∣xt−1,x0)=q(xt−1∣x0)q(xt−1∣xt,x0)q(xt∣x0)(3)
推导得来。至于如何推导,生成扩散模型漫谈(四):DDIM = 高观点DDPM 中通过待定系数法给出了详细的解释,由于解释计算过程较长,此处就不展开介绍了。
根据 ( 1 ) (1) (1),将 DDPM 中得到的公式(同 DDIM 论文中的公式 ( 9 ) (9) (9)):
x 0 = x t − 1 − α ˉ t ϵ θ ( t ) ( x t ) α ˉ t (4) x_0 = \frac{\boldsymbol{x}_t-\sqrt{1-\bar\alpha_t} \epsilon_\theta^{(t)}\left(\boldsymbol{x}_t\right)}{\sqrt{\bar\alpha_t}}\tag 4 x0=αˉtxt−1−αˉtϵθ(t)(xt)(4)
带入,我们能写出采样公式(即论文中的核心公式 ( 12 ) (12) (12)):
x t − 1 = α ˉ t − 1 ( x t − 1 − α ˉ t ϵ θ ( t ) ( x t ) α ˉ t ) ⏟ " predicted x 0 " + 1 − α ˉ t − 1 − σ t 2 ⋅ ϵ θ ( t ) ( x t ) ⏟ "direction pointing to x t " + σ t ϵ t ⏟ random noise (5) \boldsymbol{x}_{t-1}=\sqrt{\bar\alpha_{t-1}} \underbrace{\left(\frac{\boldsymbol{x}_t-\sqrt{1-\bar\alpha_t} \epsilon_\theta^{(t)}\left(\boldsymbol{x}_t\right)}{\sqrt{\bar\alpha_t}}\right)}_{\text {" predicted } \boldsymbol{x}_0 \text { " }}+\underbrace{\sqrt{1-\bar\alpha_{t-1}-\sigma_t^2} \cdot \epsilon_\theta^{(t)}\left(\boldsymbol{x}_t\right)}_{\text {"direction pointing to } \boldsymbol{x}_t \text { " }}+\underbrace{\sigma_t \epsilon_t}_{\text {random noise }}\tag 5 xt−1=αˉt−1" predicted x0 " (αˉtxt−1−αˉtϵθ(t)(xt))+"direction pointing to xt " 1−αˉt−1−σt2⋅ϵθ(t)(xt)+random noise σtϵt(5)
其中, σ \sigma σ 可以参考 DDIM 论文的核心公式 ( 16 ) (16) (16) :
σ t = η ( 1 − α ˉ t − 1 ) / ( 1 − α ˉ t ) 1 − α ˉ t / α ˉ t − 1 (6) \sigma_t =\eta \sqrt {(1-\bar\alpha_{t-1})/(1-\bar\alpha_t)} \sqrt{1-\bar\alpha_t/\bar\alpha_{t-1}}\tag 6 σt=η(1−αˉt−1)/(1−αˉt)1−αˉt/αˉt−1(6)
如果 η = 0 \eta = 0 η=0,那么生成过程就是确定的,这种情况下为 DDIM。
论文中指出,当 η = 1 \eta=1 η=1 ,该 forward process 变成了马尔科夫链,该生成过程等价于 DDPM 的生成过程。也就是说当 η = 1 \eta=1 η=1 时,公式 ( 5 ) (5) (5) 等于 DDPM 的采样公式,即公式 ( 7 ) (7) (7) :
x ^ t − 1 = 1 α t ( x t − 1 − α t 1 − α ˉ t ϵ θ ( x t , t ) ) + σ t z where z = N ( 0 , I ) (7) \begin{aligned} \hat x_{t-1}&=\frac 1{\sqrt { \alpha_t}}(x_t-\frac{1-\alpha_t}{\sqrt{1-\bar\alpha_t}}\epsilon_\theta(x_t,t)) + \sigma_t z\\ &\text{where }z=N(0,I) \end{aligned}\tag 7 x^t−1=αt1(xt−1−αˉt1−αtϵθ(xt,t))+σtzwhere z=N(0,I)(7)
将 ( 6 ) (6) (6) 式带入到 ( 1 ) (1) (1) 式中得到 DDPM 分布公式(本文章标记依照 DDPM 论文,因此有 α ˉ t = ∏ T α t \bar \alpha_t=\prod_T\alpha_t αˉt=∏Tαt):
1 − α ˉ t − 1 − σ t 2 = 1 − α ˉ t − 1 1 − α ˉ t α t (8) \sqrt{1-\bar\alpha_{t-1}-\sigma_t^2} =\frac{1-\bar\alpha_{t-1}}{\sqrt{1-\bar\alpha_t}}\sqrt{\alpha_t} \tag 8 1−αˉt−1−σt2=1−αˉt1−αˉt−1αt(8)
···1 − α ˉ t 1 − α ˉ t 1 − α ˉ t − 1 − σ t 2 = [ ( 1 − α ˉ t − 1 − ( 1 − α ˉ t − 1 1 − α ˉ t ) ( 1 − α t ) ] ( 1 − α ˉ t ) 1 − α ˉ t = ( 1 − α ˉ t − 1 ) ( 1 − ( 1 − α ˉ t − 1 1 − α ˉ t ) ( 1 − α t ) ) ( 1 − α ˉ t − 1 ) 1 − α ˉ t = ( 1 − α ˉ t − 1 ) ( 1 − α ˉ t − 1 + α ˉ t α ˉ t − 1 ) 1 − α ˉ t = ( 1 − α ˉ t − 1 ) ( 1 − α ˉ t − 1 ) α ˉ t α ˉ t − 1 1 − α ˉ t = 1 − α ˉ t − 1 1 − α ˉ t α t \begin{aligned} \frac {{\sqrt{1-\bar\alpha_t}}}{{\sqrt{1-\bar\alpha_t}}} \sqrt{1-\bar\alpha_{t-1}-\sigma_t^2} &= \frac{\sqrt{[(1-\bar\alpha_{t-1}-(\frac{1-\bar\alpha_{t-1}}{1-\bar\alpha_t})(1-\alpha_t)](1-\bar\alpha_t)}}{{\sqrt{1-\bar\alpha_t}}}\\ &=\frac{\sqrt{(1-\bar\alpha_{t-1})(1-(\frac{1-\bar\alpha_{t-1}}{1-\bar\alpha_t})(1-\alpha_t))(1-\bar\alpha_{t-1})}}{{\sqrt{1-\bar\alpha_t}}} \\ &= \frac{\sqrt{(1-\bar\alpha_{t-1})(1-\bar\alpha_t-1+\frac{\bar\alpha_t}{\bar\alpha_{t-1}})}}{\sqrt{1-\bar\alpha_t}}\\ &= \frac{\sqrt{(1-\bar\alpha_{t-1})(1-\bar\alpha_{t-1})\frac{\bar\alpha_t}{\bar\alpha_{t-1}}}}{\sqrt{1-\bar\alpha_t}} \\&=\frac{1-\bar\alpha_{t-1}}{\sqrt{1-\bar\alpha_t}}\sqrt{\alpha_t} \end{aligned} 1−αˉt1−αˉt1−αˉt−1−σt2=1−αˉt[(1−αˉt−1−(1−αˉt1−αˉt−1)(1−αt)](1−αˉt)=1−αˉt(1−αˉt−1)(1−(1−αˉt1−αˉt−1)(1−αt))(1−αˉt−1)=1−αˉt(1−αˉt−1)(1−αˉt−1+αˉt−1αˉt)=1−αˉt(1−αˉt−1)(1−αˉt−1)αˉt−1αˉt=1−αˉt1−αˉt−1αt
带入得到:
x t − 1 = α ˉ t − 1 ( x t − 1 − α ˉ t ϵ θ ( t ) ( x t ) α ˉ t ) ⏟ " predicted x 0 " + 1 − α ˉ t − 1 − σ t 2 ⋅ ϵ θ ( t ) ( x t ) ⏟ "direction pointing to x t " + σ t ϵ t ⏟ random noise = 1 α t ( x t − β t 1 − α ˉ t ϵ θ ( t ) ) + σ t ϵ t (9) \begin{aligned} \boldsymbol{x}_{t-1}&=\sqrt{\bar\alpha_{t-1}} \underbrace{\left(\frac{\boldsymbol{x}_t-\sqrt{1-\bar\alpha_t} \epsilon_\theta^{(t)}\left(\boldsymbol{x}_t\right)}{\sqrt{\bar\alpha_t}}\right)}_{\text {" predicted } \boldsymbol{x}_0 \text { " }}+\underbrace{\sqrt{1-\bar\alpha_{t-1}-\sigma_t^2} \cdot \epsilon_\theta^{(t)}\left(\boldsymbol{x}_t\right)}_{\text {"direction pointing to } \boldsymbol{x}_t \text { " }}+\underbrace{\sigma_t \epsilon_t}_{\text {random noise }}\\ &=\frac 1{\sqrt\alpha_t}\left(x_t - \frac{\beta_t}{\sqrt{1-\bar\alpha_t}} \epsilon_\theta^{(t)} \right)+ \sigma_t \epsilon_t \end{aligned}\tag 9 xt−1=αˉt−1" predicted x0 " (αˉtxt−1−αˉtϵθ(t)(xt))+"direction pointing to xt " 1−αˉt−1−σt2⋅ϵθ(t)(xt)+random noise σtϵt=αt1(xt−1−αˉtβtϵθ(t))+σtϵt(9)
···x t − 1 = α ˉ t − 1 ( x t − 1 − α ˉ t ϵ θ ( t ) ( x t ) α ˉ t ) ⏟ " predicted x 0 " + 1 − α ˉ t − 1 − σ t 2 ⋅ ϵ θ ( t ) ( x t ) ⏟ "direction pointing to x t " + σ t ϵ t ⏟ random noise = α ˉ t − 1 α ˉ t x t − α ˉ t − 1 α ˉ t 1 − α ˉ t ϵ θ ( t ) + 1 − α ˉ t − 1 1 − α ˉ t α t ϵ θ ( t ) + σ t ϵ t = 1 α t x t − 1 α t 1 − α ˉ t ( 1 − α ˉ t + ( 1 − α ˉ t − 1 ) α t ) ϵ θ ( t ) + σ t ϵ t = 1 α t ( x t − 1 − α t 1 − α ˉ t ϵ θ ( t ) ) + σ t ϵ t = 1 α t ( x t − β t 1 − α ˉ t ϵ θ ( t ) ) + σ t ϵ t \begin{aligned} \boldsymbol{x}_{t-1}&=\sqrt{\bar\alpha_{t-1}} \underbrace{\left(\frac{\boldsymbol{x}_t-\sqrt{1-\bar\alpha_t} \epsilon_\theta^{(t)}\left(\boldsymbol{x}_t\right)}{\sqrt{\bar\alpha_t}}\right)}_{\text {" predicted } \boldsymbol{x}_0 \text { " }}+\underbrace{\sqrt{1-\bar\alpha_{t-1}-\sigma_t^2} \cdot \epsilon_\theta^{(t)}\left(\boldsymbol{x}_t\right)}_{\text {"direction pointing to } \boldsymbol{x}_t \text { " }}+\underbrace{\sigma_t \epsilon_t}_{\text {random noise }} \\&= \sqrt \frac{\bar\alpha_{t-1}}{\bar\alpha_t} x_t-\sqrt \frac{\bar\alpha_{t-1}}{\bar\alpha_t} \sqrt {1-\bar\alpha_t} \epsilon_\theta^{(t)} + \frac{1-\bar\alpha_{t-1}}{\sqrt{1-\bar\alpha_t}}\sqrt{\alpha_t} \epsilon_\theta^{(t)} + \sigma_t \epsilon_t \\&=\frac 1{\sqrt\alpha_t}x_t - \frac 1{\sqrt\alpha_t \sqrt{1-\bar\alpha_t}}\left(1-\bar\alpha_t+(1-\bar\alpha_{t-1})\alpha_t \right)\epsilon_\theta^{(t)} + \sigma_t \epsilon_t\\ &=\frac 1{\sqrt\alpha_t}\left(x_t - \frac{1-\alpha_t}{\sqrt{1-\bar\alpha_t}} \epsilon_\theta^{(t)} \right)+ \sigma_t \epsilon_t\\ &=\frac 1{\sqrt\alpha_t}\left(x_t - \frac{\beta_t}{\sqrt{1-\bar\alpha_t}} \epsilon_\theta^{(t)} \right)+ \sigma_t \epsilon_t \end{aligned} xt−1=αˉt−1" predicted x0 " (αˉtxt−1−αˉtϵθ(t)(xt))+"direction pointing to xt " 1−αˉt−1−σt2⋅ϵθ(t)(xt)+random noise σtϵt=αˉtαˉt−1xt−αˉtαˉt−11−αˉtϵθ(t)+1−αˉt1−αˉt−1αtϵθ(t)+σtϵt=αt1xt−αt1−αˉt1(1−αˉt+(1−αˉt−1)αt)ϵθ(t)+σtϵt=αt1(xt−1−αˉt1−αtϵθ(t))+σtϵt=αt1(xt−1−αˉtβtϵθ(t))+σtϵt
因此,根据推导, η = 1 \eta=1 η=1 时候的 Forward Processes 等价于 DDPM,我们将在 notebook 后半部分,通过代码的方式验证当 η = 1 \eta=1 η=1 DDIM 的结果与 DDPM 基本相同。
探索与思考
接下来将根据 ppdiffusers,探索以下四个内容:
- 验证当 η = 1 \eta=1 η=1 DDIM 论文提出的的采样方式结果与 DDPM 基本相同。
- DDIM 的加速采样过程
- DDIM 采样的确定性
- INTERPOLATION IN DETERMINISTIC GENERATIVE PROCESSES
为了支持调参与打印输出,笔者对 ppdifusers 源码进行了微小的更改,各模型的计算思路与架构不变。详细可以参考 notebook 下的 ppdiffusers 文件夹
配置环境
!pip install -q -r ppdiffusers/requirements.txt
import sys
sys.path.append("ppdiffusers")
# sys.path.append("ppdiffusers/ppdiffusers")
import paddle
import numpy as np
from ppdiffusers import DDPMPipeline, DDPMScheduler, DDIMScheduler
from notebook_utils import *
DDIM 与 DDPM 探索
验证当 η = 1 \eta=1 η=1 DDIM 的结果与 DDPM 基本相同。
我们使用 google/ddpm-celebahq-256 人像模型权重进行测试,根据上文的推导,当 η = 1 \eta=1 η=1 时,我们期望 DDIM 论文中的 Forward Process 能够得出与 DDPM 相同的采样结果。由于 DDIM 与 DDPM 训练过程相同,因此我们将使用 DDPMPipeline 加载模型权重 google/ddpm-celebahq-256 ,而后采用 DDIMScheduler() 进行图片采样,并将采样结果与 DDPMPipeline 原始输出对比。
如下:
# DDPM 生成图片
pipe = DDPMPipeline.from_pretrained("google/ddpm-celebahq-256")
paddle.seed(33)
ddpm_output = pipe() # 原始 ddpm 输出
# 我们采用 DDPM 的训练结果,通过 DDIM Scheduler 来进行采样。
pipe.scheduler = DDIMScheduler()
# 设置与 DDPM 相同的采样结果,令 DDIM 采样过程中的 eta = 1.
paddle.seed(33)
ddim_output = pipe(num_inference_steps=1000, eta=1)
imgs = [ddpm_output.images[0], ddim_output.images[0]]
titles = ["ddpm", "ddim"]
compare_imgs(imgs, titles) # 该函数在 notebook_utils.py 声明
[2022-12-25 17:33:13,215] [ INFO] - Downloading model_index.json from https://bj.bcebos.com/paddlenlp/models/community/google/ddpm-celebahq-256/model_index.json
100%|██████████| 186/186 [00:00<00:00, 176kB/s]
[2022-12-25 17:33:13,323] [ INFO] - Downloading model_state.pdparams from https://bj.bcebos.com/paddlenlp/models/community/google/ddpm-celebahq-256/unet/model_state.pdparams
100%|██████████| 434M/434M [00:15<00:00, 28.5MB/s]
[2022-12-25 17:33:29,461] [ INFO] - Downloading config.json from https://bj.bcebos.com/paddlenlp/models/community/google/ddpm-celebahq-256/unet/config.json
100%|██████████| 792/792 [00:00<00:00, 457kB/s]
W1225 17:33:29.589558 1052 gpu_resources.cc:61] Please NOTE: device: 0, GPU Compute Capability: 7.0, Driver API Version: 11.2, Runtime API Version: 11.2
W1225 17:33:29.594818 1052 gpu_resources.cc:91] device: 0, cuDNN Version: 8.2.
[2022-12-25 17:33:32,970] [ INFO] - Downloading scheduler_config.json from https://bj.bcebos.com/paddlenlp/models/community/google/ddpm-celebahq-256/scheduler/scheduler_config.json
100%|██████████| 258/258 [00:00<00:00, 249kB/s]
0%| | 0/1000 [00:00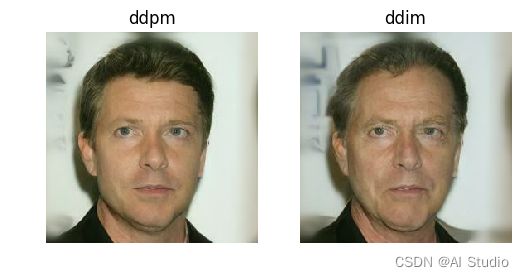
通过运行以上代码,我们可以看出 η = 1 \eta=1 η=1 时, 默认配置下 DDPM 与 DDIM 采样结果有着明显的区别。但这并不意味着论文中的推导结论是错误的,差异可能源于以下两点:
- 计算机浮点数精度问题
- Scheduler 采样过程中存在的 clip 操作导致偏差。
计算机浮点数精度问题
我们可以进行以下操作:分别调用 DDIM 与 DDPM scheduler 的 ._get_variance() 操作。在两个采样器配置相同的情况下,得到的方差应该也相同才对。
# 获得 DDPM, DDIM 采样器
ddpmscheduler = DDPMScheduler()
ddimscheduler= DDIMScheduler()
ddimscheduler.set_timesteps(1000)
ddpmscheduler.set_timesteps(1000)
print("ddim get variance for step 999", ddimscheduler._get_variance(999,998))
print("ddpm get variance for step 999", ddpmscheduler._get_variance(999))
ddim get variance for step 999 Tensor(shape=[1], dtype=float32, place=Place(gpu:0), stop_gradient=True,
[0.01999996])
ddpm get variance for step 999 Tensor(shape=[1], dtype=float32, place=Place(gpu:0), stop_gradient=True,
[0.01999998])
以上代码中,两个采样器同一时间步下的方差有些许不同,大致原因是计算机浮点精度问题,如:
beta = 0.02
alpha = 1-beta
print(1-alpha == beta) # False
如果要做到方差完全相同,那么只需要在 ppdiffusers.ppdiffusers.schedulers.scheduling_ddpm 200 行换为以下代码即可。
variance = (1 - alpha_prod_t_prev) / (1 - alpha_prod_t) * (1-self.alphas[t])
但经过实验对比,更改方差计算方式后,采样结果没有太多变化。
尝试去除 Clip 操作
Scheduler 采样过程中存在的 clip 操作导致偏差。Clip 操作对采样过程中生成的 x_0 预测结果进行了截断,尽管 DDPM, DDIM 均在预测完 x 0 x_0 x0 后进行了截断,但根据上文的推导公式,两者采样过程中 x 0 x_0 x0 权重的不同,可能导致了使用 clip 时,两者的采样结果有着明显区别。
将 clip 配置设置成 False 后, DDPM 与 DDIM( η = 1 \eta=1 η=1) 的采样结果基本上相同了。如以下代码,我们尝试测试去除 clip 配置后的采样结果:
pipe = DDPMPipeline.from_pretrained("google/ddpm-celebahq-256")
pipe.progress_bar = lambda x:x # uncomment to see progress bar
# 我们采用 DDPM 的训练结果,通过 DDIM Scheduler 来进行采样。
# print("Default setting for DDPM:\t",pipe.scheduler.config.clip_sample) # True
pipe.scheduler.config.clip_sample = False
paddle.seed(33)
ddpm_output = pipe()
pipe.scheduler = DDIMScheduler()
# print("Default setting for DDIM:\t",pipe.scheduler.config.clip_sample) # True
pipe.scheduler.config.clip_sample = False
paddle.seed(33)
ddim_output = pipe(num_inference_steps=1000, eta=1)
imgs = [ddpm_output.images[0], ddim_output.images[0]]
titles = ["DDPM no clip", "DDIM no clip"]
compare_imgs(imgs, titles)
[2022-12-25 17:35:29,510] [ INFO] - Already cached /home/aistudio/.paddlenlp/models/google/ddpm-celebahq-256/model_index.json
[2022-12-25 17:35:29,513] [ INFO] - Already cached /home/aistudio/.paddlenlp/models/google/ddpm-celebahq-256/unet/model_state.pdparams
[2022-12-25 17:35:29,515] [ INFO] - Already cached /home/aistudio/.paddlenlp/models/google/ddpm-celebahq-256/unet/config.json
[2022-12-25 17:35:30,794] [ INFO] - Already cached /home/aistudio/.paddlenlp/models/google/ddpm-celebahq-256/scheduler/scheduler_config.json
duler_config.json

DDIM 加速采样
论文附录 C 有对这一部分进行详细阐述。DDIM 优化时与 DDPM 一样,对噪声进行拟合,但 DDIM 提出了通过一个更短的 Forward Processes 过程,通过减少采样的步数,来加快采样速度:
从原先的采样序列 { 1 , . . . , T } \{1,...,T\} {1,...,T} 中选择一个子序列来生成图像。如原序列为 1 到 1000,抽取子序列可以是 1, 100, 200, … 1000 (类似 arange(1, 1000, 100))。抽取方式不固定。在生成时同样采用公式 ( 1 ) (1) (1),其中的 timestep t t t ,替换为子序列中的 timestep。其中的 α ˉ t \bar\alpha_t αˉt 对应到训练时候的数值,比如采样 1, 100, 200, ... 1000 中的第二个样本,则使用训练时候采用的 α ˉ 100 \bar\alpha_{100} αˉ100 (此处只能替换 alphas_cumprod α ˉ \bar\alpha αˉ,不能直接替换 alpha 参数 α t \alpha_t αt)。
参考论文中的 Figure 3,在加速生成的情况下, η \eta η 越小,生成的图片效果越好,同时 η \eta η 的减小能够很大程度上弥补采样步数减少带来的生成质量下降问题。
pipe.progress_bar = lambda x:x # cancel process bar
etas = [0, 0.4, 0.8]
steps = [10, 50, 100, 1000]
fig = plt.figure(figsize=(7, 7))
for i in range(len(etas)):
for j in range(len(steps)):
plt.subplot(len(etas), len(steps), j+i*len(steps) + 1)
paddle.seed(77)
sample1 = pipe(num_inference_steps=steps[j], eta=etas[i])
plt.imshow(sample1.images[0])
plt.axis("off")
plt.title(f"eta {etas[i]}|step {steps[j]}")
plt.show()

通过以上可以发现几点:
- η \eta η 越小,采样步数产生的图片质量和风格差异就越小。
- η \eta η 的减小能够很大程度上弥补采样步数减少带来的生成质量下降问题。
DDIM 采样的确定性
由于 DDIM 在生成过程中 η = 0 \eta=0 η=0,因此采样过程中不涉及任何随机因素,最终生成图片将由一开始输入的图片噪声 x t x_t xt 决定。
paddle.seed(77)
x_t = paddle.randn((1, 3, 256, 256))
paddle.seed(8)
sample1 = pipe(num_inference_steps=50,eta=0,x_t=x_t)
paddle.seed(9)
sample2 = pipe(num_inference_steps=50,eta=0,x_t=x_t)
compare_imgs([sample1.images[0], sample2.images[0]], ["sample(seed 8)", "sample(seed 9)"])

图像重建
在 DDIM 论文中,其作者提出了可以将一张原始图片 x 0 x_0 x0 经过足够长的步数 T T T 加噪为 x T x_T xT,而后通过 ODE 推导出来的采样方式,尽可能的还原原始图片。
根据公式 ( 5 ) (5) (5)(即论文中的公式 12),我们能够推理得到论文中的公式 ( 13 ) (13) (13):
x t − Δ t α t − Δ t = x t α t + ( 1 − α t − Δ t α t − Δ t − 1 − α t α t ) ϵ θ ( t ) ( x t ) (10) \frac{\boldsymbol{x}_{t-\Delta t}}{\sqrt{\alpha_{t-\Delta t}}}=\frac{\boldsymbol{x}_t}{\sqrt{\alpha_t}}+\left(\sqrt{\frac{1-\alpha_{t-\Delta t}}{\alpha_{t-\Delta t}}}-\sqrt{\frac{1-\alpha_t}{\alpha_t}}\right) \epsilon_\theta^{(t)}\left(\boldsymbol{x}_t\right) \tag {10} αt−Δtxt−Δt=αtxt+(αt−Δt1−αt−Δt−αt1−αt)ϵθ(t)(xt)(10)
···x t − 1 = α ˉ t − 1 ( x t − 1 − α ˉ t ϵ θ ( t ) ( x t ) α ˉ t ) ⏟ " predicted x 0 " + 1 − α ˉ t − 1 − σ t 2 ⋅ ϵ θ ( t ) ( x t ) ⏟ "direction pointing to x t " + σ t ϵ t ⏟ random noise x t − 1 α ˉ t − 1 = x t α ˉ t − 1 − α ˉ t α ˉ t ϵ θ ( t ) + 1 − α ˉ t − 1 α ˉ t − 1 ϵ θ ( t ) ( x t ) 当 t 足够大时可以看做 x t − Δ t α ˉ t − Δ t = x t α ˉ t + ( 1 − α ˉ t − Δ t α ˉ t − Δ t − 1 − α ˉ t α ˉ t ) ϵ θ ( t ) ( x t ) \begin{aligned} \boldsymbol{x}_{t-1}&=\sqrt{\bar\alpha_{t-1}} \underbrace{\left(\frac{\boldsymbol{x}_t-\sqrt{1-\bar\alpha_t} \epsilon_\theta^{(t)}\left(\boldsymbol{x}_t\right)}{\sqrt{\bar\alpha_t}}\right)}_{\text {" predicted } \boldsymbol{x}_0 \text { " }}+\underbrace{\sqrt{1-\bar\alpha_{t-1}-\sigma_t^2} \cdot \epsilon_\theta^{(t)}\left(\boldsymbol{x}_t\right)}_{\text {"direction pointing to } \boldsymbol{x}_t \text { " }}+\underbrace{\sigma_t \epsilon_t}_{\text {random noise }} \\\frac{x_{t-1}}{\sqrt {\bar\alpha_{t-1}}}&= \frac {x_t}{\sqrt {\bar\alpha_t}} - \frac{\sqrt{1-\bar\alpha_t}}{\sqrt {\bar\alpha_t}}\epsilon_\theta^{(t)} + \frac{\sqrt {1-\bar\alpha_{t-1}}}{\sqrt {\bar\alpha_{t-1}}}\epsilon_\theta^{(t)}\left(\boldsymbol{x}_t\right)\\ &\text {当 t 足够大时可以看做}\\\frac{\boldsymbol{x}_{t-\Delta t}}{\sqrt{\bar\alpha_{t-\Delta t}}} &=\frac {x_t}{\sqrt {\bar\alpha_t}} + \left(\sqrt{\frac{1-\bar\alpha_{t-\Delta t}}{\bar\alpha_{t-\Delta t}}}-\sqrt{\frac{1-\bar\alpha_t}{\bar\alpha_t}}\right) \epsilon_\theta^{(t)}\left(\boldsymbol{x}_t\right) \end{aligned} xt−1αˉt−1xt−1αˉt−Δtxt−Δt=αˉt−1" predicted x0 " (αˉtxt−1−αˉtϵθ(t)(xt))+"direction pointing to xt " 1−αˉt−1−σt2⋅ϵθ(t)(xt)+random noise σtϵt=αˉtxt−αˉt1−αˉtϵθ(t)+αˉt−11−αˉt−1ϵθ(t)(xt)当 t 足够大时可以看做=αˉtxt+(αˉt−Δt1−αˉt−Δt−αˉt1−αˉt)ϵθ(t)(xt)
而后进行换元,令 σ = ( 1 − α ˉ / α ˉ ) , x ˉ = x / α ˉ \sigma=(\sqrt{1-\bar\alpha}/\sqrt{\bar\alpha}), \bar x = x/\sqrt{\bar\alpha} σ=(1−αˉ/αˉ),xˉ=x/αˉ,带入得到:
d x ‾ ( t ) = ϵ θ ( t ) ( x ‾ ( t ) σ 2 + 1 ) d σ ( t ) (11) \mathrm{d} \overline{\boldsymbol{x}}(t)=\epsilon_\theta^{(t)}\left(\frac{\overline{\boldsymbol{x}}(t)}{\sqrt{\sigma^2+1}}\right) \mathrm{d} \sigma(t)\tag{11} dx(t)=ϵθ(t)(σ2+1x(t))dσ(t)(11)
于是,基于这个 ODE 结果,能通过 x ˉ ( t ) + d x ˉ ( t ) \bar x({t}) + d\bar x(t) xˉ(t)+dxˉ(t) 计算得到 x ˉ ( t + 1 ) \bar x(t+1) xˉ(t+1) 与 x t + 1 x_{t+1} xt+1
根据 github - openai/improved-diffusion,其实现根据 ODE 反向采样的方式为:直接根据公式 ( 5 ) (5) (5) 进行变换,把 t − 1 t-1 t−1 换成 t + 1 t+1 t+1:
x t + 1 = α ˉ t + 1 ( x t − 1 − α ˉ t ϵ θ ( t ) ( x t ) α ˉ t ) ⏟ " predicted x 0 " + 1 − α ˉ t + 1 ⋅ ϵ θ ( t ) ( x t ) ⏟ "direction pointing to x t " + σ t ϵ t ⏟ random noise (12) \boldsymbol{x}_{t+1}=\sqrt{\bar\alpha_{t+1}} \underbrace{\left(\frac{\boldsymbol{x}_t-\sqrt{1-\bar\alpha_t} \epsilon_\theta^{(t)}\left(\boldsymbol{x}_t\right)}{\sqrt{\bar\alpha_t}}\right)}_{\text {" predicted } \boldsymbol{x}_0 \text { " }}+\underbrace{\sqrt{1-\bar\alpha_{t+1}} \cdot \epsilon_\theta^{(t)}\left(\boldsymbol{x}_t\right)}_{\text {"direction pointing to } \boldsymbol{x}_t \text { " }}+\underbrace{\sigma_t \epsilon_t}_{\text {random noise }}\tag{12} xt+1=αˉt+1" predicted x0 " (αˉtxt−1−αˉtϵθ(t)(xt))+"direction pointing to xt " 1−αˉt+1⋅ϵθ(t)(xt)+random noise σtϵt(12)
而参考公式 ( 11 ) (11) (11) 的推导过程, ( 12 ) (12) (12) 可以看成下面这种形式:
x t + Δ t α ˉ t + Δ t = x t α ˉ t + ( 1 − α ˉ t + Δ t α ˉ t + Δ t − 1 − α ˉ t α ˉ t ) ϵ θ ( t ) ( x t ) (13) \frac{\boldsymbol{x}_{t+\Delta t}}{\sqrt{\bar\alpha_{t+\Delta t}}} =\frac {x_t}{\sqrt {\bar\alpha_t}} + \left(\sqrt{\frac{1-\bar\alpha_{t+\Delta t}}{\bar\alpha_{t+\Delta t}}}-\sqrt{\frac{1-\bar\alpha_t}{\bar\alpha_t}}\right) \epsilon_\theta^{(t)}\left(\boldsymbol{x}_t\right)\tag {13} αˉt+Δtxt+Δt=αˉtxt+(αˉt+Δt1−αˉt+Δt−αˉt1−αˉt)ϵθ(t)(xt)(13)
以下我们尝试对自定义的输入图片进行反向采样(reverse sampling)和原图恢复,我们导入本地图片:
from PIL import Image
# 查看原始图片
raw_image = Image.open("imgs/sample2.png").crop((0,0,350,350)).resize((256,256))
raw_image.show()

ppdiffusers 中不存在 reverse_sample 方案,因此我们根据本文中的公式 ( 12 ) (12) (12) 来实现一下 reverse_sample 过程,具体为:
def reverse_sample(self, model_output, x, t, prev_timestep):
"""
Sample x_{t+1} from the model and x_t using DDIM reverse ODE.
"""
alpha_bar_t_next = self.alphas_cumprod[t]
alpha_bar_t = self.alphas_cumprod[prev_timestep] if prev_timestep >= 0 else self.final_alpha_cumprod
inter = (
((1-alpha_bar_t_next)/alpha_bar_t_next)** (0.5)- \
((1-alpha_bar_t)/alpha_bar_t)** (0.5)
)
x_t_next = alpha_bar_t_next** (0.5) * (x/ (alpha_bar_t ** (0.5)) + \
(
model_output * inter
)
)
return x_t_next
为了方便 alpha 等参数的调用,笔者将该方法整理到了 ppdiffusers/ppdiffusers/schedulers/scheduling_ddim.py/DDIMScheduer 中。
# 进行反向采样与解码
T = 200
def add_noise_by_reverse_sample(pipe, raw_image, T):
"""
receive a raw image, convert to $x_0$ and construct $x_{t}$ using reverse sample.
"""
image = paddle.to_tensor([np.array(raw_image)])
image = (image/127.5 - 1).transpose([0,3,1,2])
pipe.scheduler.set_timesteps(T)
with paddle.no_grad():
for t in pipe.progress_bar(pipe.scheduler.timesteps[::-1]):
prev_timestep = t - pipe.scheduler.config.num_train_timesteps // pipe.scheduler.num_inference_steps
model_output=pipe.unet(image, prev_timestep).sample
image = pipe.scheduler.reverse_sample(model_output=model_output,
x=image,
t=t,
prev_timestep=prev_timestep)
image2show = (image / 2 + 0.5).clip(0, 1).transpose([0, 2, 3, 1]).cast("float32").numpy()
image2show = pipe.numpy_to_pil(image2show)
return image, image2show
pipe.scheduler.config.clip_sample = False # 同上述实验,我们必须关掉 clip
image, image2show = add_noise_by_reverse_sample(pipe, raw_image, T)
sample1 = pipe(num_inference_steps=T,eta=0,x_t=image)
# see what image look like
compare_imgs([sample1.images[0],image2show[0]], [f"Reconstructed Image (T={T})",f"Reversed Noise(T={T})"])

T = 100
image, image2show = add_noise_by_reverse_sample(pipe, raw_image, T)
sample1 = pipe(num_inference_steps=T,eta=0,x_t=image)
# see what image look like
compare_imgs([sample1.images[0],image2show[0]], [f"Reconstructed Image (T={T})",f"Reversed Noise(T={T})"])

可以看到,我们通过 ODE 的方式,对图片进行加噪之后,变成右边的电视画面。而在重新采样之后,得到了一张与原图片相似的图片,图片的还原图随着时间布的增大而增加。
潜在的风格融合方式
通过两个能够生成不同图片的噪声 z 1 , z 2 z_1, z_2 z1,z2,进行 spherical linear interpolation 球面线性插值。而后作为 x T x_T xT 生成具有两张画面共同特点的图片。有点类似风格融合的效果。
paddle.seed(77)
pipe.scheduler.config.clip_sample = False
z_0 = paddle.randn((1, 3, 256, 256))
sample1 = pipe(num_inference_steps=50,eta=0,x_t=z_0)
paddle.seed(2707)
z_1 = paddle.randn((1, 3, 256, 256))
sample2 = pipe(num_inference_steps=50,eta=0,x_t=z_1)
compare_imgs([sample1.images[0], sample2.images[0]], ["sample from z_0", "sample from z_1"])

以上选择 seed 为 77 和 2707 的噪声进行采样,他们的采样结果分别展示在上方。
以下参考 ermongroup/ddim/blob/main/runners/diffusion.py ,对噪声进行插值,方式大致为:
x t = sin ( ( 1 − α ) θ ) sin ( θ ) z 0 + s i n ( α θ ) sin ( θ ) z 1 , w h e r e θ = arccos ( ∑ z 1 z 0 ∣ ∣ z 1 ∣ ⋅ ∣ ∣ z 0 ∣ ∣ ) x_t = \frac {\sin\left((1-\alpha)\theta\right)}{\sin(\theta)}z_0 + \frac{sin(\alpha\theta)}{\sin(\theta)}z_1,\\where\ \theta=\arccos\left(\frac{\sum z_1z_0}{||z_1|·||z_0||}\right) xt=sin(θ)sin((1−α)θ)z0+sin(θ)sin(αθ)z1,where θ=arccos(∣∣z1∣⋅∣∣z0∣∣∑z1z0)
其中 α \alpha α 用于控制融合的比重,在下面测示例中, α \alpha α 越大说明 z 0 z_0 z0 占比越大。
# Reference: https://github.com/ermongroup/ddim/blob/main/runners/diffusion.py#L296
def slerp(z1, z2, alpha):
theta = paddle.acos(paddle.sum(z1 * z2) / (paddle.norm(z1) * paddle.norm(z2)))
return (
paddle.sin((1 - alpha) * theta) / paddle.sin(theta) * z1
+ paddle.sin(alpha * theta) / paddle.sin(theta) * z2
)
alphas = [0, 0.2, 0.4, 0.5, 0.6, 0.8, 1]
img_size = 1
fig = plt.figure(figsize=(7, 7))
for i in range(len(alphas)):
x_t = slerp(z_0, z_1, alphas[i])
sample_merge = pipe(num_inference_steps=50,eta=0,x_t=x_t)
plt.subplot(1,len(alphas),1+i)
plt.imshow(sample_merge.images[0])
plt.axis("off")

可以看出,当 α \alpha α 为 0.2, 0.8 时,我们能够看到以下融合的效果,如头发颜色,无关特征等。但在中间部分( α = 0.4 , 0.5 , 0.6 \alpha=0.4,0.5,0.6 α=0.4,0.5,0.6),采样的图片质量就没有那么高了。
那根据前两节的阐述,我们可以实现一个小的pipeline, 具备接受使用 DDIM 接受两张图片,而后输出一张两者风格融合之后的图片。
# 查看原始图片
raw_image_1 = Image.open("imgs/sample2.png").crop((20,20,330,330)).resize((256,256))
raw_image_2 = sample1.images[0]
compare_imgs([raw_image_1, raw_image_2], ["image 1", "image 2"])

我们尝试让右边的女士头像具备梅西风格。但是效果看起来很不好的样子。
# 融合两张图片
T = 50
alpha = 0.81 # alpha 参数很重要
z_1, _ = add_noise_by_reverse_sample(pipe, raw_image_1, T)
z_2, _ = add_noise_by_reverse_sample(pipe, sample1.images[0], T)
x_t = slerp(z_1, z_2, alpha)
sample_merge = pipe(num_inference_steps=T,eta=0,x_t=x_t)
compare_imgs([sample1.images[0],sample_merge.images[0] ], ["sample 1", "sample 1 merged messi style"])

总结
以上便是 DDIM 的介绍,在下一份笔记中,笔者将继续探索 ppdiffusers 中开源出来的 diffusion sde 系列模型。
参考
Denoising Diffusion Implicit Models
苏建林 - 生成扩散模型漫谈 系列笔记
小小将 - 扩散模型之DDIM
github - openai/improved-diffusion
请点击此处查看本环境基本用法.
Please click here for more detailed instructions.
此文章为搬运
[原项目链接].(https://aistudio.baidu.com/aistudio/projectdetail/5368825?forkThirdPart=1)