Opencv的KalmanFilter学习笔记
本文代码主要参考
https://blog.csdn.net/GDFSG/article/details/50904811
的鼠标跟随的那个demo,略有修改
#include
#include
#include
#include
#include
#include
using namespace cv;
using namespace std;
const int winHeight = 720;
const int winWidth = 1280;
Point mousePosition = Point(winWidth >> 1, winHeight >> 1);
int main(void)
{
RNG rng;
unsigned int seed = time(0);
srand(seed);
// 1.kalman filter setup
const int stateNum = 4; // 状态值4×1向量(x,y,△x,△y)
const int measureNum = 2; // 测量值2×1向量(x,y)
KalmanFilter KF(stateNum, measureNum, 0);
KF.transitionMatrix = (Mat_(4, 4) << 1, 0, 1, 0,
0, 1, 0, 1,
0, 0, 1, 0,
0, 0, 0, 1); // 转移矩阵A
setIdentity(KF.measurementMatrix); // 测量矩阵H
setIdentity(KF.processNoiseCov, Scalar::all(0.0008)); // 系统噪声方差矩阵Q
setIdentity(KF.measurementNoiseCov, Scalar::all(1)); // 测量噪声方差矩阵R
setIdentity(KF.errorCovPost, Scalar::all(1)); // 后验错误估计协方差矩阵P
rng.fill(KF.statePost, RNG::UNIFORM, 0, winHeight > winWidth ? winWidth : winHeight); // 初始状态值x(0)
Mat measurement = Mat::zeros(measureNum, 1, CV_32F); // 初始测量值x'(0),因为后面要更新这个值,所以必须先定义
Mat image(winHeight, winWidth, CV_8UC3, Scalar(255, 255, 255));
// image.setTo(Scalar(255,255,255,0));
int real_x = 100;
int real_y = 50;
measurement.at(0) = real_x - 30 + rand() % 60;
measurement.at(1) = real_y - 20 + rand() % 40;
mousePosition.x = measurement.at(0);
mousePosition.y = measurement.at(1);
// KF.statePre.at(0) = mousePosition.x;
// KF.statePre.at(1) = mousePosition.y;
// init value
KF.statePost.at(0) = mousePosition.x;
KF.statePost.at(1) = mousePosition.y;
KF.statePost.at(2) = 0;
KF.statePost.at(3) = 0;
Point last_predict_pt(mousePosition.x, mousePosition.y);
Point last_mouse_position(mousePosition.x, mousePosition.y);
Point last_real_position(real_x, real_y);
cout << "statePre = " << KF.statePre << endl;
cout << "statePost = " << KF.statePost << endl;
for (int i = 1; i < 100; i++)
{
// 2.kalman prediction
Mat prediction = KF.predict();
Point predict_pt = Point(prediction.at(0), prediction.at(1)); // 预测值(x',y')
// 3.update measurement
real_x = 100 + 10 * i;
real_y = 50 + 5 * i;
measurement.at(0) = real_x - 30 + rand() % 60;
measurement.at(1) = real_y - 20 + rand() % 40;
mousePosition.x = measurement.at(0);
mousePosition.y = measurement.at(1);
// 4.update
KF.correct(measurement);
printf("x = %d, y = %d, predict_pt.x = %d, predict_pt.y = %d, real_x = %d, real_y = %d\n",
(int)measurement.at(0), (int)measurement.at(1), predict_pt.x, predict_pt.y, real_x - predict_pt.x, real_y - predict_pt.y);
// cout << "errorCovPre = " << KF.errorCovPre<< endl;
// cout << "gain = " << KF.gain<< endl;
// cout << "errorCovPost = " << KF.errorCovPost<< endl;
cout << "statePre = " << KF.statePre << endl;
// draw
// circle(image,predict_pt,1,Scalar(0,255,0),3); //predicted point with green
// circle(image,mousePosition,1,Scalar(0,0,255),3); //current position with red
line(image, last_real_position, Point(real_x, real_y), Scalar(200, 200, 200), 2);
line(image, last_mouse_position, mousePosition, Scalar(0, 255, 0), 1);
line(image, last_predict_pt, predict_pt, Scalar(0, 0, 255), 1);
imshow("test.jpg", image);
waitKey(1);
last_predict_pt = predict_pt;
last_mouse_position = mousePosition;
last_real_position = Point(real_x, real_y);
}
imwrite("result.jpg", image);
}
CMakeLists.txt
cmake_minimum_required(VERSION 2.8) #声明cmake需要的最低版本
project(Demo) #声明cmake项目的名称
set(CMAKE_CXX_STANDARD 11)
set(CMAKE_CXX_STANDARD_REQUIRED TRUE)
find_package(OpenCV REQUIRED)
include_directories(${OpenCV_INCLUDE_DIRS}) #添加OpenCV头文件
add_executable(${PROJECT_NAME} main.cpp) #生成可执行文件,这里我把可执行文件名称定义成项目名称
target_link_libraries(${PROJECT_NAME} ${OpenCV_LIBS}) #链接OpenCV库文件到cmake项目上
最后生成的图片
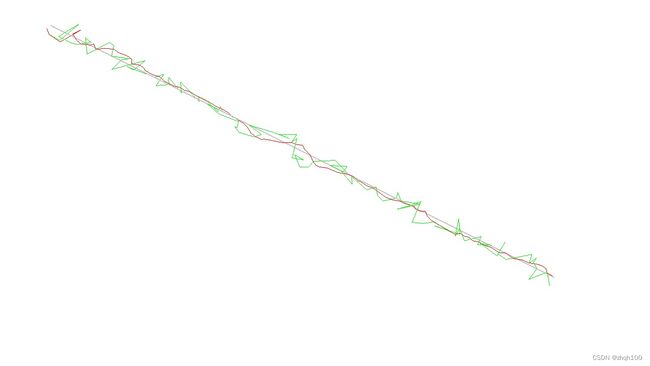
灰色直线是理论真实值
绿色线是输入曲线,可以看出在随机数的影响下,波动非常之混乱
红色线是经卡尔曼滤波后预测得到的曲线,比起输入的跳动值,红色曲线非常稳定