旋转矩阵和欧拉角
欧拉角介绍
旋转可以参考两种坐标系,内部坐标系(XYZ), 角度 α, β, γ.
外部坐标系(xyz), 角度 ψ, θ, φ.
不考虑参考坐标系情况下, 按照旋转方式可以分为两种:
-
Proper Euler angles
(z-x-z, x-y-x, y-z-y, z-y-z, x-z-x, y-x-y) -
Tait–Bryan angles
(x-y-z, y-z-x, z-x-y, x-z-y, z-y-x, y-x-z).
与proper方式相比, Tait方式旋转会用上所有坐标轴.
我们常说的欧拉角指的都是Tait-Bryan angles. -
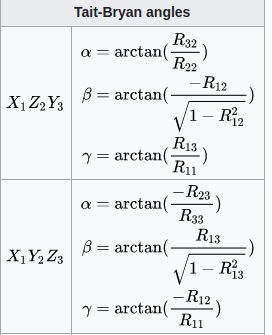
旋转矩阵与欧拉角转换参考Computing Euler angles from a rotation matrix

维基百科给的公式:
-
旋转矩阵转换为欧拉角(Tait-Bryan angles)参考代码
#Ref: https://www.learnopencv.com/rotation-matrix-to-euler-angles/
def isRotationMatrix(R):
''' checks if a matrix is a valid rotation matrix(whether orthogonal or not)
'''
Rt = np.transpose(R)
shouldBeIdentity = np.dot(Rt, R)
I = np.identity(3, dtype = R.dtype)
n = np.linalg.norm(I - shouldBeIdentity)
return n < 1e-6
def matrix2angle(R):
''' get three Euler angles from Rotation Matrix
Args:
R: (3,3). rotation matrix
Returns:
x: pitch
y: yaw
z: roll
'''
assert(isRotationMatrix)
sy = math.sqrt(R[0,0] * R[0,0] + R[1,0] * R[1,0])
singular = sy < 1e-6
if not singular :
x = math.atan2(R[2,1] , R[2,2])
y = math.atan2(-R[2,0], sy)
z = math.atan2(R[1,0], R[0,0])
else :
x = math.atan2(-R[1,2], R[1,1])
y = math.atan2(-R[2,0], sy)
z = 0
# rx, ry, rz = np.rad2deg(x), np.rad2deg(y), np.rad2deg(z)
rx, ry, rz = x*180/np.pi, y*180/np.pi, z*180/np.pi
return rx, ry, rz
参考:
rotations_in_3d_part1.html
坐标系旋转
首先坐标系的旋转和点的旋转是相反的. 这里先讨论下坐标系的旋转.
假设在xoy坐标系下有个点p, 那么这个点在sot坐标系下的坐标是多少呢?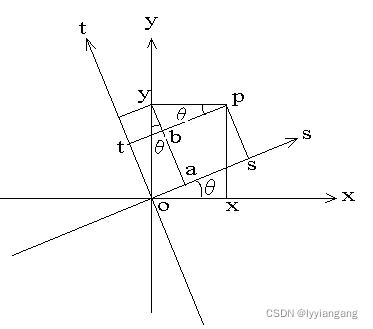
这里先假设xoy坐标系下点坐标为X,sot坐标系下点坐标为X’, 这里先假设他们应该有如下关系: R X ′ = X RX'=X RX′=X,其中 R = [ s ⃗ , t ⃗ ] R=[\vec{s}, \vec{t}] R=[s,t] .
现在开始证明为什么R可以用s和t这么表示. 直观上可以知道, 如果 X ′ = [ 1 , 0 , 0 ] T X'=[1, 0, 0]^T X′=[1,0,0]T, 那么就可以取出R的第一列也就是 s ⃗ \vec{s} s, 所以可以反推出R的表示形式.
从上图不难看出, s ⃗ = [ c o s ( θ ) , s i n ( θ ) ] T \vec{s}=[cos(\theta), sin(\theta)]^T s=[cos(θ),sin(θ)]T , t ⃗ = [ − s i n ( θ ) , c o s ( θ ) ] T \vec{t}=[-sin(\theta),cos(\theta)]^T t=[−sin(θ),cos(θ)]T, 所以旋转矩阵表示为:
R = [ s ⃗ , t ⃗ ] = [ c o s ( θ ) − s i n ( θ ) s i n ( θ ) c o s ( θ ) ] R=[\vec{s}, \vec{t}]=\begin{bmatrix} cos(\theta) & -sin(\theta) \\ sin(\theta) & cos(\theta) \end{bmatrix} R=[s,t]=[cos(θ)sin(θ)−sin(θ)cos(θ)]
另一方面可以这么理解, 我们知道一个点是可以通过坐标系的基空间表示的.常见的表示方法:
对与sot坐标系则有:
o p ⃗ = [ s s , t t ] T \vec{op}=[ss, tt]^T op=[ss,tt]T , 而基向量st又是用xoy坐标系表示的, 所以, 矩阵 [ s ⃗ , t ⃗ ] [\vec{s}, \vec{t}] [s,t]有了将sot坐标系点转到xoy坐标系点的能力.
opengl中有个lookat函数, 能够将世界坐标系的点转换为相机坐标系下,可以注意下里面的R.
def lookat_camera(vertices, eye, at = None, up = None):
""" 'look at' transformation: from world space to camera space
standard camera space:
camera located at the origin.
looking down negative z-axis.
vertical vector is y-axis.
Xcam = R(X - C)
Homo: [[R, -RC], [0, 1]]
Args:
vertices: [nver, 3]
eye: [3,] the XYZ world space position of the camera.
at: [3,] a position along the center of the camera's gaze.
up: [3,] up direction
Returns:
transformed_vertices: [nver, 3]
"""
if at is None:
at = np.array([0, 0, 0], np.float32)
if up is None:
up = np.array([0, 1, 0], np.float32)
eye = np.array(eye).astype(np.float32)
at = np.array(at).astype(np.float32)
z_aixs = -normalize(at - eye) # look forward
x_aixs = normalize(np.cross(up, z_aixs)) # look right
y_axis = np.cross(z_aixs, x_aixs) # look up
R = np.stack((x_aixs, y_axis, z_aixs))#, axis = 0) # 3 x 3
transformed_vertices = vertices - eye # translation
transformed_vertices = transformed_vertices.dot(R.T) # rotation
return transformed_vertices
但是如果是旋转点, 假如旋转后点的坐标X’与旋转前X有如下关系:
R X ′ = X RX'=X RX′=X
那么, 这个R矩阵则为:
R = [ s ⃗ , t ⃗ ] = [ c o s ( θ ) s i n ( θ ) − s i n ( θ ) c o s ( θ ) ] R=[\vec{s}, \vec{t}]=\begin{bmatrix} cos(\theta) & sin(\theta) \\ -sin(\theta) & cos(\theta) \end{bmatrix} R=[s,t]=[cos(θ)−sin(θ)sin(θ)cos(θ)]
台大机器人学之运动学-林沛群对旋转的介绍
旋转矩阵转为欧拉角时有两种方式,该视频将欧拉角分为Fixed Angels和Eular angels.
- Fixed angles(先做的旋转放后面, 参考外部坐标系)
旋转时参考坐标系为一个固定坐标系( X A , Y A , Z A X_A,Y_A,Z_A XA,YA,ZA),

其中 R B A R^A_B RBA代表从B到A的旋转,上图沿着X-Y-Z顺序做的旋转,所以旋转矩阵定义为:
R Z R Y R X R_ZR_YR_X RZRYRX,先做的旋转放后面, 假如有点 P a P_a Pa, 那么可以通过公式 P b = R Z R Y R X P a P_b=R_ZR_YR_XP_a Pb=RZRYRXPa将点p从a转到b坐标系。
- Eular Angles(先做的旋转放前面, 参考内部坐标系)
Euler Angels指的是每次旋转参考的都是自身坐标系。这里以ZYX旋转顺序为例,可以看出 R B A R^A_B RBA的构成是先做的旋转放前面。

其实两种旋转方式调换顺序可以表示同一种旋转。


代码实现
可以使用scipy库中的Rotation 模块来做欧拉角到matrix的转换.
小写字母xyz代码参考坐标系为外部坐标系, 大写则为内部坐标系.
- 外部坐标系的转换测试
from scipy.spatial.transform import Rotation
import numpy as np
mat_x = Rotation.from_euler('x', 30, degrees = True).as_matrix()
mat_y = Rotation.from_euler('y', 40, degrees = True).as_matrix()
mat_z = Rotation.from_euler('z', 50, degrees = True).as_matrix()
my_rot_mat = mat_z @ mat_y @ mat_x
print(my_rot_mat)
mat_gt = Rotation.from_euler('xyz', [30, 40, 50], degrees = True).as_matrix()
print(mat_gt)
打印结果:
[[ 0.49240388 -0.45682599 0.74084306]
[ 0.58682409 0.80287234 0.10504046]
[-0.64278761 0.38302222 0.66341395]]
[[ 0.49240388 -0.45682599 0.74084306]
[ 0.58682409 0.80287234 0.10504046]
[-0.64278761 0.38302222 0.66341395]]
可以看出from_eular(‘xyz’)指的是先做x,后做y,最后z的变换, 对应矩阵上的操作就是mat_z @ mat_y @ mat_x
- 内部坐标系的转换测试
mat_x = Rotation.from_euler('X', 30, degrees = True).as_matrix()
mat_y = Rotation.from_euler('Y', 40, degrees = True).as_matrix()
mat_z = Rotation.from_euler('Z', 50, degrees = True).as_matrix()
my_rot_mat = mat_x @ mat_y @ mat_z
print(my_rot_mat)
mat_gt = Rotation.from_euler('XYZ', [30, 40, 50], degrees = True).as_matrix()
print(mat_gt)
打印:
[[ 0.49240388 -0.58682409 0.64278761]
[ 0.8700019 0.31046846 -0.38302222]
[ 0.02520139 0.74782807 0.66341395]]
[[ 0.49240388 -0.58682409 0.64278761]
[ 0.8700019 0.31046846 -0.38302222]
[ 0.02520139 0.74782807 0.66341395]]
也就印证了前面台大机器人学之运动学对而这转换的介绍.
总结下就是, 旋转参考坐标系为固定的外部坐标系时, 我们说的xyz旋转a,b,c度, 那么这个旋转矩阵就是: RzRyRz.如果参考坐标系为自身坐标系时, 这个旋转矩阵就是 RxRyRz.