Xavier NX 使用OpenCV+GStreamer实现硬解码
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
文章目录
- 前言
- 一、NVCODEC是什么?
- 二、编译OpenCV
-
- 1.准备环境
- 2.编译
- 3.测试代码
- 总结
前言
最近在NX上做一个项目,需要把rtsp流出来的图片送入AI推理,结果发现OpenCV的VideoCapture使用的是软解码大量消耗了cpu的资源影响了实际效果。我只能把解码这部分送到硬件解码器去处理,分摊掉cpu的压力,接下来我就具体说说怎么处理。由于我手上用的是NX,所以本教程是基于Xavier NX的,不排除其他Jetson产品也能用,这个需要大家自行测试。
一、NVCODEC是什么?
这个东西我在其他文章里已经介绍很多了,这里就不过多赘述了,一语概括就是Nvidia提供的硬件编解码,它是一个专门的硬件元器件,在处理视频上面很有优势,但是不代表不消耗任何的cpu或者内存资源。
使用硬解码的方式有很多种,这里我介绍OpenCV+GStreamer组合的方式,其他方法请自行研究。
二、编译OpenCV
1.准备环境
你首先需要一台刷好机的NX,而且在刷机的时候一定要勾选CUDA相关的选项,因为这个教程需要CUDA和CuDNN。接下来安装必要的软件,由于软件很多,建议使用国内源。
sudo apt-get update
sudo apt-get dist-upgrade -y --autoremove
sudo apt-get install -y \
build-essential \
cmake \
git \
gfortran \
libatlas-base-dev \
libavcodec-dev \
libavformat-dev \
libavresample-dev \
libcanberra-gtk3-module \
libdc1394-22-dev \
libeigen3-dev \
libglew-dev \
libgstreamer-plugins-base1.0-dev \
libgstreamer-plugins-good1.0-dev \
libgstreamer1.0-dev \
libgtk-3-dev \
libjpeg-dev \
libjpeg8-dev \
libjpeg-turbo8-dev \
liblapack-dev \
liblapacke-dev \
libopenblas-dev \
libpng-dev \
libpostproc-dev \
libswscale-dev \
libtbb-dev \
libtbb2 \
libtesseract-dev \
libtiff-dev \
libv4l-dev \
libxine2-dev \
libxvidcore-dev \
libx264-dev \
pkg-config \
python-dev \
python-numpy \
python3-dev \
python3-numpy \
python3-matplotlib \
qv4l2 \
v4l-utils \
v4l2ucp \
zlib1g-dev
只后下载opencv-4.5.1和opencv_contrib-4.5.1,这里我使用的是4.5.1版本,其他的版本请大家自行测试。
2.编译
在此之前你需要删除自带的opencv,假如你刷机的时候选择了opencv,如果这个opencv满足要求你就不需要重新编译,如果不满足要求请继续往下看。
cd opencv-4.5.1
mkdir build && cd build
cmake -D CMAKE_BUILD_TYPE=RELEASE \
-D CMAKE_INSTALL_PREFIX=/usr/local \
-D ENABLE_PRECOMPILED_HEADERS=OFF \
-D INSTALL_C_EXAMPLES=OFF \
-D INSTALL_PYTHON_EXAMPLES=OFF \
-D BUILD_opencv_python2=OFF \
-D BUILD_opencv_python3=ON \
-D PYTHON_DEFAULT_EXECUTABLE=$(/usr/bin/python3 -c "import sys; print(sys.executable)") \
-D PYTHON3_EXECUTABLE=$(/usr/bin/python3 -c "import sys; print(sys.executable)") \
-D PYTHON3_NUMPY_INCLUDE_DIRS=$(/usr/bin/python3 -c "import numpy; print (numpy.get_include())") \
-D PYTHON3_PACKAGES_PATH=$(/usr/bin/python3 -c "from distutils.sysconfig import get_python_lib; print(get_python_lib())") \
-D WITH_V4L=ON \
-D WITH_LIBV4L=ON \
-D WITH_CUDA=ON \
-D CUDA_CUDA_LIBRARY=ON \
-D WITH_CUDNN=ON \
-D CUDNN_VERSION='8.0' \
-D ENABLE_FAST_MATH=ON \
-D CUDA_FAST_MATH=ON \
-D WITH_CUBLAS=ON \
-D WITH_OPENGL=ON \
-D WITH_FFMPEG=ON \
-D CUDA_ARCH_BIN=5.3,6.2,7.2 \
-D CUDA_ARCH_PTX= \
-D EIGEN_INCLUDE_PATH=/usr/include/eigen3 \
-D ENABLE_NEON=ON \
-D OPENCV_DNN_CUDA=ON \
-D OPENCV_ENABLE_NONFREE=ON \
-D OPENCV_GENERATE_PKGCONFIG=ON \
-D WITH_GSTREAMER=ON \
-D WITH_OPENGL=ON \
-D OPENCV_EXTRA_MODULES_PATH=../../opencv_contrib-4.5.1/modules ..
如果不想把opencv和numpy结合起来的话就把numpy选项去掉,不需要ffmpeg的话就去掉ffmpeg。cmake构建成功的时候需要看一下你关联的这些库找到没有,一定要是YES才行,后面跟的是版本号,我用的是Ubuntu18.04,版本号应该大差不差,不用太关心,能找到就行了。接下来编译
make -j5
sudo make install
这里我测试了下用5个线程编译比较合适,前提是打开了6核心设置,具体方法在jtop里面
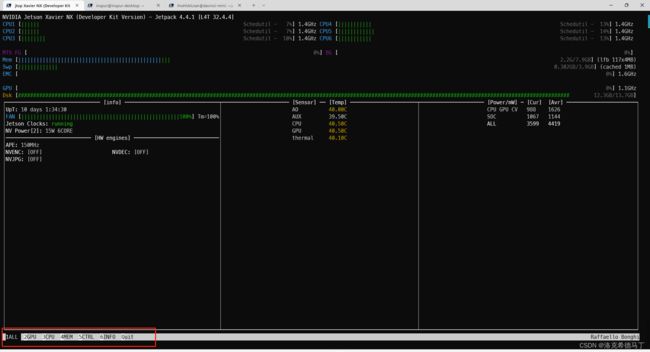
看红框标记的那一栏,这些可以通过数字来切换的,我们切换到5(控制选项)
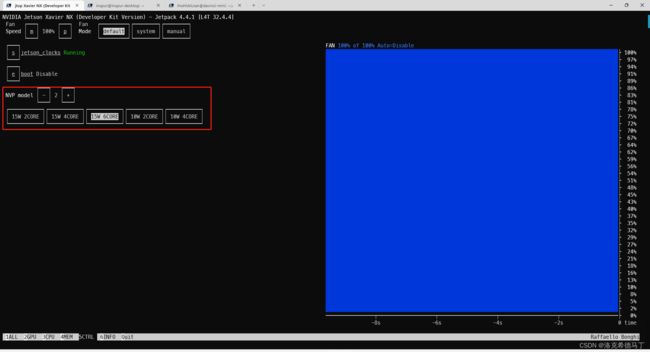
按一下’s’就打开了jetson_clocks,这个时候GPU的频率会从114MHZ到1.1GHZ。
NVP model就是设置性能模式,15W 2CORE的话CPU只有2个核心可以用,每个核心的频率可以达到最大1.9GHZ,如果是15W 6CORE每个核心频率最大可以达到1.4GHZ,可以根据实际需求设置。
3.测试代码
# --------------------------------------------------------
# Camera sample code for Tegra X2/X1
#
# This program could capture and display video from
# IP CAM, USB webcam, or the Tegra onboard camera.
# Refer to the following blog post for how to set up
# and run the code:
# https://jkjung-avt.github.io/tx2-camera-with-python/
#
# Written by JK Jung 我关闭了显示功能,需要的可以自行打开。
总结
我用的是Jetpack 4.4.2 版本,OpenCV预装4.5.4不带GStreamer的,需要删除重新编译。只要依赖库装好,中间编译一气呵成,没有遇到问题。和x86服务器的编译方式还是有差别的。