注意力机制论文:Squeeze-and-Excitation Networks及其PyTorch实现
Squeeze-and-Excitation Networks
PDF: https://arxiv.org/pdf/1709.01507.pdf
PyTorch代码: https://github.com/shanglianlm0525/PyTorch-Networks
Squeeze-and-Excitation Networks(SENet)是由自动驾驶公司Momenta在2017年公布的一种全新的图像识别结构,它通过对特征通道间的相关性进行建模,把重要的特征进行强化来提升准确率。这个结构是2017 ILSVR竞赛的冠军,top5的错误率达到了2.251%,比2016年的第一名还要低25%,可谓提升巨大。
1 概述
SENet通过学习channel之间的相关性,筛选出了针对通道的注意力,稍微增加了一点计算量,但是效果提升较明显
Squeeze-and-Excitation(SE) block是一个子结构,可以有效地嵌到其他分类或检测模型中。
SENet的核心思想在于通过网络根据loss去学习feature map的特征权重来使模型达到更好的结果
SE模块本质上是一种attention机制
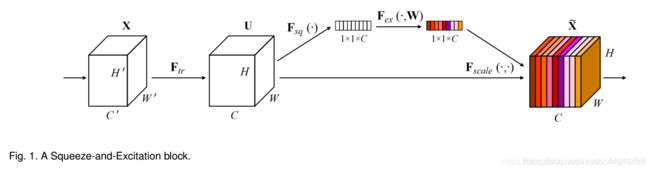
2 Squeeze-and-Excitation模块
Squeeze 操作对 C x H x W 进行global average pooling,得到大小为 C x 1 x 1 的特征图
Excitation 操作 使用一个全连接神经网络,对Sequeeze之后的结果做一个非线性变换
Reweight 操作 使用Excitation 得到的结果作为权重,乘到输入特征上
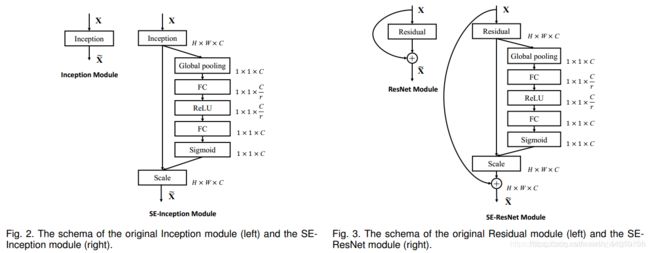
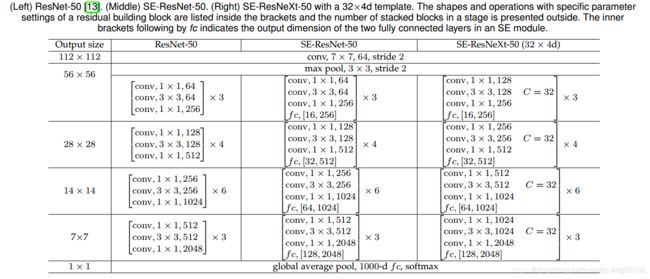
3 SE模块应用举例
SE-Inception 和 SE-ResNet
class SE_Module(nn.Module):
def __init__(self, channel,ratio = 16):
super(SE_Module, self).__init__()
self.squeeze = nn.AdaptiveAvgPool2d(1)
self.excitation = nn.Sequential(
nn.Linear(in_features=channel, out_features=channel // ratio),
nn.ReLU(inplace=True),
nn.Linear(in_features=channel // ratio, out_features=channel),
nn.Sigmoid()
)
def forward(self, x):
b, c, _, _ = x.size()
y = self.squeeze(x).view(b, c)
z = self.excitation(y).view(b, c, 1, 1)
return x * z.expand_as(x)
4 SENet
PyTorch代码:
import torch
import torch.nn as nn
import torchvision
def Conv1(in_planes, places, stride=2):
return nn.Sequential(
nn.Conv2d(in_channels=in_planes,out_channels=places,kernel_size=7,stride=stride,padding=3, bias=False),
nn.BatchNorm2d(places),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
)
class SE_Module(nn.Module):
def __init__(self, channel,ratio = 16):
super(SE_Module, self).__init__()
self.squeeze = nn.AdaptiveAvgPool2d(1)
self.excitation = nn.Sequential(
nn.Linear(in_features=channel, out_features=channel // ratio),
nn.ReLU(inplace=True),
nn.Linear(in_features=channel // ratio, out_features=channel),
nn.Sigmoid()
)
def forward(self, x):
b, c, _, _ = x.size()
y = self.squeeze(x).view(b, c)
z = self.excitation(y).view(b, c, 1, 1)
return x * z.expand_as(x)
class SE_ResNetBlock(nn.Module):
def __init__(self,in_places,places, stride=1,downsampling=False, expansion = 4):
super(SE_ResNetBlock,self).__init__()
self.expansion = expansion
self.downsampling = downsampling
self.bottleneck = nn.Sequential(
nn.Conv2d(in_channels=in_places,out_channels=places,kernel_size=1,stride=1, bias=False),
nn.BatchNorm2d(places),
nn.ReLU(inplace=True),
nn.Conv2d(in_channels=places, out_channels=places, kernel_size=3, stride=stride, padding=1, bias=False),
nn.BatchNorm2d(places),
nn.ReLU(inplace=True),
nn.Conv2d(in_channels=places, out_channels=places*self.expansion, kernel_size=1, stride=1, bias=False),
nn.BatchNorm2d(places*self.expansion),
)
if self.downsampling:
self.downsample = nn.Sequential(
nn.Conv2d(in_channels=in_places, out_channels=places*self.expansion, kernel_size=1, stride=stride, bias=False),
nn.BatchNorm2d(places*self.expansion)
)
self.relu = nn.ReLU(inplace=True)
def forward(self, x):
residual = x
out = self.bottleneck(x)
if self.downsampling:
residual = self.downsample(x)
out += residual
out = self.relu(out)
return out
class SE_ResNet(nn.Module):
def __init__(self,blocks, num_classes=1000, expansion = 4):
super(SE_ResNet,self).__init__()
self.expansion = expansion
self.conv1 = Conv1(in_planes = 3, places= 64)
self.layer1 = self.make_layer(in_places = 64, places= 64, block=blocks[0], stride=1)
self.layer2 = self.make_layer(in_places = 256,places=128, block=blocks[1], stride=2)
self.layer3 = self.make_layer(in_places=512,places=256, block=blocks[2], stride=2)
self.layer4 = self.make_layer(in_places=1024,places=512, block=blocks[3], stride=2)
self.avgpool = nn.AvgPool2d(7, stride=1)
self.fc = nn.Linear(2048,num_classes)
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
elif isinstance(m, nn.BatchNorm2d):
nn.init.constant_(m.weight, 1)
nn.init.constant_(m.bias, 0)
def make_layer(self, in_places, places, block, stride):
layers = []
layers.append(SE_ResNetBlock(in_places, places,stride, downsampling =True))
for i in range(1, block):
layers.append(SE_ResNetBlock(places*self.expansion, places))
return nn.Sequential(*layers)
def forward(self, x):
x = self.conv1(x)
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.layer4(x)
x = self.avgpool(x)
x = x.view(x.size(0), -1)
x = self.fc(x)
return x
def SE_ResNet50():
return SE_ResNet([3, 4, 6, 3])
if __name__=='__main__':
model = SE_ResNet50()
print(model)
input = torch.randn(1, 3, 224, 224)
out = model(input)
print(out.shape)