voc数据集的map计算方式
相关概念
- map mean average precision,表示各类别ap的平均值
- ap average precision,表示P-R曲线下的面积
- p precision,查准率,p = T P/ (T P + F P)
- r recall,召回率,r = T P/(T P + F N)
- TP true positive,在detection中,表示成功检测到某个ground truth bounding box的预测框的数量
- FP false positive,表示没能匹配到某个ground truth bounding box的预测框的数量
- FN false negative,表示没能检测出来的ground truth bounding box 注意FN和FP是不一样的
- 判定阈值 表示判断预测框成功检测出某个gt bbox的iou阈值,即iou(dt, gt)大于该阈值时,才认为dt成功匹配到了gt,在coco style的map计算中,存在多个判定阈值0.5 , 0.55 , 0.6 , . . . , 0.95。
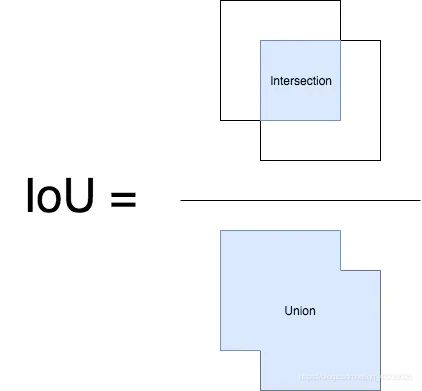
- IoU:交并比
VOC数据集map的计算方式
描述
voc数据集map的计算方式包括两个
- Pascal Voc 2007 ,11点法求AP。
- voc 2010-2012 ,计算平滑后的曲线与recall轴围成的面积。
代码解析
检测出来的bbox包含score和bbox,按照score降序排序,所以每添加一个样本,就代表阈值降低一点(真实情况下score降低,iou不一定降低)。这样就是可以有很多种阈值,每个阈值情况下计算一个prec和recall。
d:对模型检测到的bbox循环:
j:对该bbox对应的图像(i)中所有的gt循环:
如果bb和bbgt有重叠:
计算ov=重叠部分面积/联合的面积,并记录ovmax,jmax
如果ovmax大于阈值:
如果i图像的第jmax个gt的diff(是否为diffcilut样本)不为0
如果i图像的第jmax个gt的det为0,则tp(d)=1,标记为true positive
如果i图像的第jmax个gt的det不为0,则fp(d)=1,标记为false positive(mutlti detection)
否则,
fp(d)=1,标记为false positive
具体代码如下:(voc 2010-2012 map的计算方式,voc07的算法没用就删除了)
import xml.etree.ElementTree as ET
import os
import pickle
import numpy as np
import matplotlib.pyplot as plt
def draw_pr(rec, prec, classname):
plt.figure()
plt.xlabel('recall')
plt.ylabel('precision')
plt.title('PR cruve')
plt.plot(rec.tolist(), prec.tolist())
plt.savefig('{}_pr.png'.format(classname))
def parse_rec(filename):
""" Parse a PASCAL VOC xml file """
tree = ET.parse(filename)
objects = []
for obj in tree.findall('object'):
obj_struct = {}
obj_struct['name'] = obj.find('name').text#name节点存的是class,图像类型名称
obj_struct['pose'] = obj.find('pose').text#默认为Unspecified
obj_struct['truncated'] = int(obj.find('truncated').text)#默认为0
obj_struct['difficult'] = int(obj.find('difficult').text)#默认为0
bbox = obj.find('bndbox')#获取尺寸位置信息
obj_struct['bbox'] = [int(bbox.find('xmin').text),
int(bbox.find('ymin').text),
int(bbox.find('xmax').text),
int(bbox.find('ymax').text)]
objects.append(obj_struct)
return objects
def voc_ap(rec, prec):
""" ap = voc_ap(rec, prec, [use_07_metric])
Compute VOC AP given precision and recall.
If use_07_metric is true, uses the
VOC 07 11 point method (default:False).
"""
# correct AP calculation
# first append sentinel values at the end
# 将recall和precision补全,主要用于积分计算,保证recall的域为[0,1]
mrec = np.concatenate(([0.], rec, [1.]))
mpre = np.concatenate(([0.], prec, [0.]))
# 滤除fp增加条件下导致的pre减小的无效值
# compute the precision envelope
for i in range(mpre.size - 1, 0, -1):
mpre[i - 1] = np.maximum(mpre[i - 1], mpre[i])
# to calculate area under PR curve, look for points
# where X axis (recall) changes value
# 滤除总检测样本数增加导致计算的recall的未增加的量
i = np.where(mrec[1:] != mrec[:-1])[0]
# 通过积分计算precision对recall的平均数
# and sum (\Delta recall) * prec
ap = np.sum((mrec[i + 1] - mrec[i]) * mpre[i + 1])
return ap
def voc_eval(detpath,
annopath,
imagesetfile,
classname,
cachedir,
ovthresh=0.25):
"""rec, prec, ap = voc_eval(detpath,
annopath,
imagesetfile,
classname,
[ovthresh],
[use_07_metric])
Top level function that does the PASCAL VOC evaluation.
detpath: Path to detections
detpath.format(classname) should produce the detection results file.
annopath: Path to annotations
annopath.format(imagename) should be the xml annotations file.
imagesetfile: Text file containing the list of images, one image per line.
classname: Category name (duh)
cachedir: Directory for caching the annotations
[ovthresh]: Overlap threshold (default = 0.5)
[use_07_metric]: Whether to use VOC07's 11 point AP computation
(default False)
"""
# assumes detections are in detpath.format(classname)
# assumes annotations are in annopath.format(imagename)
# assumes imagesetfile is a text file with each line an image name
# cachedir caches the annotations in a pickle file
#################################################################################################
##### 第一步:获取所有的GT标签信息,存入字典recs中或文件annots.pkl中,便于使用 #####################
#################################################################################################
# 标签信息都是GT的信息
# 提取annotations标签文件缓存路径
# 如果没有缓存文件,就读取信息并创建一个二进制缓存文件annots.pkl
if not os.path.isdir(cachedir):
os.mkdir(cachedir)
cachefile = os.path.join(cachedir, 'annots.pkl')
# 从图像名称文件中读取图像名称,存入imagenames列表中
with open(imagesetfile, 'r') as f:
lines = f.readlines()
imagenames = [x.strip() for x in lines]
# 根据imagenames列表存储或读取标签信息
if not os.path.isfile(cachefile):
# 载入标签文件,recs这个字典中,存储了验证集所有的GT信息
recs = {}
for i, imagename in enumerate(imagenames):
#解析标签xml文件,annopath为/{}.xml文件,加format表示为{}中赋值
#imagename来源于从imagesetfile中提取,循环采集所有的的信息
recs[imagename] = parse_rec(annopath.format(imagename))
#解析标签文件图像进度条
if i % 100 == 0:
print('Reading annotation for {:d}/{:d}'.format(
i + 1, len(imagenames)))
# 将读取标签内容存入缓存文件annots.pkl,这是个数据流二进制文件
print('Saving cached annotations to {:s}'.format(cachefile))
with open(cachefile, 'wb') as f:
pickle.dump(recs, f)#使用了pickle.dump,存入后保存成二进制文件
else:
# 有标签缓存文件,直接读取,recs中存的是GT标签信息
with open(cachefile, 'rb') as f:
recs = pickle.load(f)
#################################################################################################
##### 第二步:从字典recs中提取当前类型的GT标签信息,存入字典class_recs中,key为图片名imagename #####
#################################################################################################
# 针对某个class名称的result文件提取对应的每个图片文件中GT的信息,存入R
# bbox中保存该类型GT所有的box信息,difficult、det、npos等都从R中提取
# 提取完毕针对每个图片生成一个字典,存入class_recs
# 这里相当于根据class对图片中新不同类型目标进行归纳,每个类型计算一个AP
class_recs = {}
npos = 0
# 上篇文章中说了当result文件名前面含有comp4_det_test_时的2种方法,这里还有个更简单的,即将classname后加上[15:]
# 表示读取第15位开始到结束的内容,这是第3种方法
for imagename in imagenames:
#R中为所有图片中,类型匹配上的GT信息
R = [obj for obj in recs[imagename] if obj['name'] == classname]
#bbox中存储了该文件中该类型的所有box信息
bbox = np.array([x['bbox'] for x in R])
#difficult转化成bool型变量,其中xml文件中difficult的含义,表示目标检测的难度,如果为1的话,表示难检测出来。模型检测不出来,也不会把它当做漏检测
difficult = np.array([x['difficult'] for x in R]).astype(np.bool)
#该图片中,没有匹配到当前类型det=[],匹配到1个,det=[False],匹配到多个det=[False, ...]
#det将是和difficult不同的地方,当不是difficult的时候,det也是false,这是一个区别
det = [False] * len(R)
#利用difficult进行计数,这里所有的值都是difficult,如果不是difficult就累加,~是取反。其实就是统计xml文件中0 的个数,表示gt的个数,便于求recall。
npos = npos + sum(~difficult)
#class_recs是一个字典,第一层key为文件名,一个文件名对应的子字典中,存储了key对应的图片文件中所有的该类型的box、difficult、det信息
#这些box、difficult、det信息可以包含多个GT的内容
class_recs[imagename] = {'bbox': bbox,
'difficult': difficult,
'det': det}
#################################################################################################
##### 第三步:从当前class的result文件中读取结果,并将结果按照confidence从大到小排序 ################
##### 排序后的结果存在BB和image_ids中 ################
#################################################################################################
# 读取当前class的result文件内容,这里要去result文件以class命名
detfile = detpath.format(classname)
with open(detfile, 'r') as f:
lines = f.readlines()
# 删除result文件中的'',对于非voc数据集,有的就没有这些内容
splitlines = [x.strip().split(' ') for x in lines]
# 将每个结果条目中第一个数据,就是图像id,这个image_ids是文件名
image_ids = [x[0] for x in splitlines]
# 提取每个结果的置信度,存入confidence
confidence = np.array([float(x[1]) for x in splitlines])
# 提取每个结果的结果,存入BB
BB = np.array([[float(z) for z in x[2:]] for x in splitlines])
# 对confidence从大到小排序,获取id
sorted_ind = np.argsort(-confidence)
# 获得排序值,这个值后来没有再用过
sorted_scores = np.sort(-confidence)
# 按confidence排序对BB进行排序
BB = BB[sorted_ind, :]
# 对相应的图像的id进行排序,其实每个图像对应一个id,即对应一个目标,当一个图中识别两个相同的GT,是可以重复的
# 这样image_ids中,不同位置就会有重复的内容
image_ids = [image_ids[x] for x in sorted_ind]
#################################################################################################
##### 第四步:对比GT参数和result,计算出IOU,在fp和tp相应位置标记1 #################################
#################################################################################################
# go down dets and mark TPs and FPs
nd = len(image_ids)#图像id的长度
tp = np.zeros(nd)#设置TP初始值
fp = np.zeros(nd)#设置FP初始值
#对一个result文件中所有目标进行遍历,每个图片都进行循环,有可能下次还会遇到这个图片,如果
for d in range(nd):
#提取排序好的GT参数值,里面可以有多个目标,当image_ids[d1]和image_ids[d2]相同时,两个R内容相同,且都可能存了多个目标信息
R = class_recs[image_ids[d]]
#将BB中confidence第d大的BB内容提取到bb中,这是result中的信息,只可能包含一个目标
bb = BB[d, :].astype(float)
ovmax = -np.inf
#BBGT就是当前confidence从大到小排序条件下,第d个GT中bbox中的信息
BBGT = R['bbox'].astype(float)
#当BBGT中有信息,就是没有虚警目标,计算IOU
#当一个图片里有多个相同目标,选择其中最大IOU,GT和检测结果不重合的IOU=0
if BBGT.size > 0:
# compute overlaps
# intersection
ixmin = np.maximum(BBGT[:, 0], bb[0])
iymin = np.maximum(BBGT[:, 1], bb[1])
ixmax = np.minimum(BBGT[:, 2], bb[2])
iymax = np.minimum(BBGT[:, 3], bb[3])
#大于0就输出正常值,小于等于0就输出0
iw = np.maximum(ixmax - ixmin + 1., 0.)
ih = np.maximum(iymax - iymin + 1., 0.)
inters = iw * ih
# union
uni = ((bb[2] - bb[0] + 1.) * (bb[3] - bb[1] + 1.) +
(BBGT[:, 2] - BBGT[:, 0] + 1.) *
(BBGT[:, 3] - BBGT[:, 1] + 1.) - inters)
overlaps = inters / uni#计算交并比,就是IOU
ovmax = np.max(overlaps)#选出最大交并比,当有
jmax = np.argmax(overlaps)#求出两个最大交并比的值的序号
#当高于阈值,对应图像fp = 1
#ovmax > ovthresh的情况肯定不存在虚警,ovmax原始值为-inf,则没有目标肯定不可能进入if下面的任务
if ovmax > ovthresh:
#如果不存在difficult,初始状态,difficult和det都是False
#找到jamx后,第一任务是确定一个tp,第二任务就是将R['det'][jmax]置为1,表示为已检测,下次再遇到就认为是fp
if not R['difficult'][jmax]:
if not R['det'][jmax]:
tp[d] = 1.
R['det'][jmax] = 1 #标记为已检测
else:
fp[d] = 1.#一个目标被检测两次
else:
fp[d] = 1.
#################################################################################################
##### 第五步:计算ap,rec,prec ###################################################################
#################################################################################################
##difficult用于标记真值个数,prec是precision,rec是recall
# compute precision recall
fp = np.cumsum(fp)#采用cumsum计算结果是一种积分形式的累加序列,假设fp=[0,1,1],那么np.cumsum(fp)为[0,1,2]。
tp = np.cumsum(tp)
#print("float(npos):", float(npos))
rec = tp / float(npos)#npos表示gt的个数
# avoid divide by zero in case the first detection matches a difficult
# ground truth
prec = tp / np.maximum(tp + fp, np.finfo(np.float64).eps)#maximum这一大串表示防止分母为0
ap = voc_ap(rec, prec)
return rec, prec, ap
if __name__ == "__main__":
detpath = "results/detect_result{}.txt" #darknet valid输出的检测框的txt文件
annopath = "Annotations/{}.xml" #检测图片的标签文件
imagesetfile = '/test.txt' #测试图片imagename,如下所示
# 003505
# 004343
classnames = ["person", "car"] #类别
cachedir = '.'
ap_dict = {} #保存每个类别的ap值
for classname in classnames:
if os.path.exists("annots.pkl"):
os.remove("annots.pkl")
rec, prec, ap = voc_eval(detpath,annopath,imagesetfile,classname,cachedir,ovthresh=0.5)
ap_dict[classname] = ap
#画出每个类别的pr曲线
draw_pr(rec, prec, classname)
print("ap_dict\n", ap_dict)
代码里面也画了每个类别的pr曲线

疑点解释
1、为什么map的计算没有设置score_threshold?
https://www.zhihu.com/question/299799471/answer/1088201230
计算mAP的时候,Score Threshold不算是一个可以调节的超参数.。当然,根据mAP的定义,可以把所有YOLOv3模型的Score Threshold设为0,可以得到完整的PR曲线。如果设置Score Threshold,pr曲线从横坐标直接截断了,如下图Score Threshold设置为0.3。
根据代码会带来两个影响:1)因为误检测少了,那么fp的数量降低,precision = tp/(tp+fp)就会变高;2)也会使得检测出来变少了,导致tp的数量变少,recall的值变小。似乎会设置score thread对map的计算影响很小,但是代码里面有一行代码,在不设置Score Threshold的情况下也减少了fp,使得fp对map的计算影响变小了,如果设置Score Threshold会减少map
i = np.where(mrec[1:] != mrec[:-1])[0]
参考
https://blog.csdn.net/lixiang_whu/article/details/64495093