机器人之Move_Base
仅供学习使用!
-
- 总框架
- move_base 基本配置
- 代价地图配置
-
-
- 全局/局部代价地图通用配置
- 全局代价地图特有配置
- 局部代价地图特有配置
-
- 规划器配置
-
- 全局规划器配置
- 局部规划器(TEB)配置
总框架
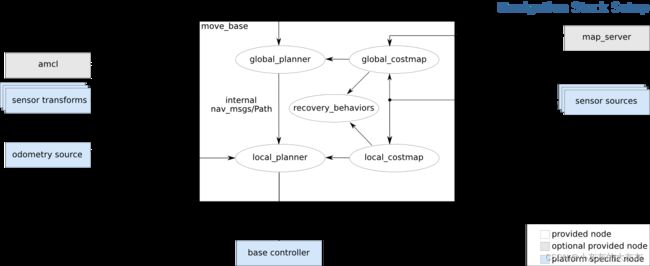
move_base 基本配置
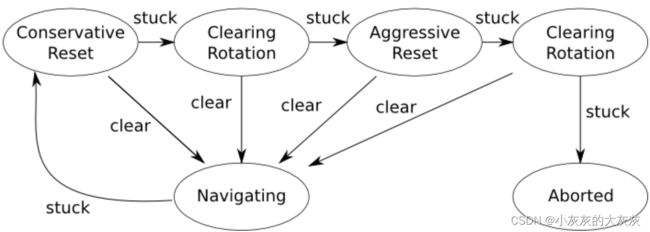
当机器人认为自己被卡住时,move_base 节点可以选择执行恢复行为。默认情况下,move_base 节点将采取以下操作来尝试清理空间:
首先,用户指定区域之外的障碍物将从机器人的地图中清除。接下来,如果可能,机器人将执行就地旋转以清理空间。如果这也失败了,机器人将更积极地清除它的地图,移除它可以就地旋转的矩形区域之外的所有障碍物。随后将进行另一次就地轮换。如果这一切都失败了,机器人将认为其目标不可行,并通知用户它已中止。这些恢复行为可以使用 recovery_behaviors 参数配置,并使用 recovery_behavior_enabled 参数禁用。
move_base基本配置的yaml文件
shutdown_costmaps : false # 默认false,当 move_base 处于非活动状态时是否关闭节点的 costmaps
# planner config
base_global_planner : "global_planner/GlobalPlanner" # 新版全局路径规划器
base_local_planner : "teb_local_planner/TebLocalPlannerROS" # TEB局部路径规划器
controller_frequency : 4.0 # 默认20.0,速度发送命令的速率(Hz)
controller_patience : 3.0 # 默认15.0,在执行空间清理之前,控制器在没有收到有效控制的情况下等待时间(s)
planner_patience : 3.0 # 默认5.0,在执行空间清理之前,planner等待寻找有效计划的时间(s)
planner_frequency : 1.0 # 默认0.0,运行全局规划器循环的速率,0.0意味着仅接收到新目标时阻塞运行
recovery_behavior_enabled : true # 默认true,是否启用 move_base 恢复行为以尝试清理空间
clearing_rotation_allowed : true # 默认true,仅当使用默认恢复行为有效,确定机器人在尝试清理空间时是否会尝试就地旋转
oscillation_timeout : 5.0 # 默认0.0,在执行恢复行为之前允许振荡的时间(s)。值 0.0 对应于无限超时
oscillation_distance : 0.1 # 默认0.5,机器人必须移动多远才能被视为不摆动
max_planning_retries : 1 # 默认-1,在执行恢复行为之前允许planning重试多少次,值 -1.0 对应于无限重试
conservative_reset_dist : 3.0 # 默认值3.0,仅当使用默认恢复行为有效,当试图清除地图中的空间时,距离机器人的距离(以米为单位)将从成本地图中清除障碍物
# recovery_behaviors
# 恢复行为,name是官方状态转移图中各节点,type为具体对应动作
recovery_behaviors:
- name: 'conservative_reset'
type: 'clear_costmap_recovery/ClearCostmapRecovery'
#- name: 'aggressive_reset'
# type: 'clear_costmap_recovery/ClearCostmapRecovery'
- name: 'clearing_rotation'
type: 'rotate_recovery/RotateRecovery'
#- name: 'move_slow_and_clear'
#type: 'move_slow_and_clear/MoveSlowAndClear'
# 0. 保守复位
conservative_reset:
reset_distance: 1.0
#layer_names: [static_layer, obstacle_layer, inflation_layer]
layer_names: [obstacle_layer]
# 1. 激进复位
aggressive_reset:
reset_distance: 3.0
#layer_names: [static_layer, obstacle_layer, inflation_layer]
layer_names: [obstacle_layer]
move_slow_and_clear:
clearing_distance: 0.5
limited_trans_speed: 0.1
limited_rot_speed: 0.4
limited_distance: 0.3
代价地图配置
全局/局部代价地图通用配置
# 多边形机器人配置端点,左上角开始
footprint: [[-0.12, -0.12], [-0.12, 0.12],[0.12, 0.12], [0.12, -0.12]]
# 圆形机器人配置半径
#robot_radius : 0.12
# 0. 静态层
static_layer:
enabled: true
map_topic: "/map"
# 1. 障碍层
obstacle_layer:
enabled: true # 是否启用
max_obstacle_height: 0.6 # 障碍物的最大高度(m)
min_obstacle_height: 0.0 # 障碍物的最小高度(m)
obstacle_range: 2.0 # 障碍物离机器人的最大距离
raytrace_range: 5.0 # 机器人移动过程中,代价地图动态更新障碍物的范围
inflation_radius: 0.10 # 障碍物膨胀半径,一般设为地盘直接大小
combination_method: 1 # 更改障碍层如何处理其外部层传入数据的行为
observation_sources: laser_scan_sensor # 障碍层传感器观测来源
track_unknown_space: true # 导航时是否允许通过地图中未知区域
origin_z: 0.0 # 地图Z轴原点
z_resolution: 0.1 # z分辨率
z_voxels: 10 # 垂直列的体素数,网格高度 = z_resolution * z_voxels
unknown_threshold: 15 # 未知单元的阈值
mark_threshold: 0 # 标记为空闲单元的阈值
publish_voxel_map: true # 是否发布
footprint_clearing_enabled: true # 机器人足迹是否清除
# 申明一个雷达,供上文使用
laser_scan_sensor:
data_type: LaserScan # 雷达数据类型
topic: /scan # 传感器数据话题名
marking: true # 是否允许此传感器在障碍物层创建障碍物
clearing: true # 是否允许此传感器在障碍物层消除障碍物
expected_update_rate: 0 # 期望传感器数据更新频率(s),0为两次读取有无限时间
min_obstacle_height: 0.00 # 传感器视为有效的最小障碍物高度(m)
max_obstacle_height: 0.30 # 传感器视为有效的最大障碍物高度(m),大于全局min_obstacle_height时无效,一般小于全局min_obstacle_height以过滤
# 2. 膨胀层
inflation_layer:
enabled: true
cost_scaling_factor: 10.0 # exponential rate at which the obstacle cost drops off (default: 10)
inflation_radius: 0.20 # max. distance from an obstacle at which costs are incurred for planning paths.
全局代价地图特有配置
global_costmap:
global_frame: map # 参考系
robot_base_frame: base_footprint # 参考系
update_frequency: 1.0 # 全局代价地图更新频率(Hz)
publish_frequency: 1.0 # 全局代价地图发布频率(Hz)
#static_map: true # 是否由mapserver提供的地图服务进行代价地图的初始化
rolling_window: false # 机器人移动时,保持机器人在代价地图的中心
resolution: 0.05 # 代价地图的分辨率
transform_tolerance: 1.2 # 获取TF的超时时间(s)
#map_type: costmap # 声明global_costmap的地图类型
# 制作代价地图时,所插入的costmap插件
plugins:
- {name: static_layer, type: "costmap_2d::StaticLayer"}
- {name: inflation_layer, type: "costmap_2d::InflationLayer"}
# 是否允许全局规划器在未知区域通行
GlobalPlanner:
allow_unknown: true
局部代价地图特有配置
local_costmap:
global_frame: odom # 参考系
#global_frame: /odom_combined
robot_base_frame: base_footprint
update_frequency: 5.0 # 代价地图更新频率(Hz)
publish_frequency: 5.0 # 代价地图发布频率(Hz)
#static_map: false
rolling_window: true # 机器人移动时,保持机器人在代价地图的中心
width: 3.0 # 代价地图的宽度(m)
height: 3.0 # 代价地图的高度(m)
resolution: 0.05 # 代价地图的分辨率(m/格)
transform_tolerance: 1.2 # 获取TF的超时时间(s)
# map_type: costmap
# 制作代价地图时,所插入的costmap插件
plugins:
- {name: static_layer, type: "costmap_2d::StaticLayer"}
- {name: obstacle_layer, type: "costmap_2d::VoxelLayer"}
- {name: inflation_layer, type: "costmap_2d::InflationLayer"}
规划器配置
全局规划器配置
# 规划器选择
base_global_planner: "global_planner/GlobalPlanner"
base_local_planner: "teb_local_planner/TebLocalPlannerROS"
# 全局规划器私有配置,http://wiki.ros.org/global_planner
GlobalPlanner:
old_navfn_behavior: false # 使用老版,true时导致其他参数无效
use_quadratic: true # 使用势的二次近似。否则,使用更简单的计算,默认true
use_dijkstra: true # 使用Dijkstra算法,false时使用 A star 算法
use_grid_path: false # 创建遵循网格边界的路径(折线),否则使用梯度下降法,默认false
allow_unknown: true # 允许planner通过未知空间进行规划,默认true;需要有 track_unknown_space: true 在障碍物/体素层(在 costmap_commons_param 中)才能工作
planner_window_x: 0.0 # default 0.0
planner_window_y: 0.0 # default 0.0
default_tolerance: 0.0 # 如果目标在障碍物中,则计划到半径内最近的点 default_tolerance,默认 0.0
局部规划器(TEB)配置
# ros wiki for teb : http://wiki.ros.org/teb_local_planner
# 参数:https://charon-cheung.github.io/2021/06/07/%E8%B7%AF%E5%BE%84%E8%A7%84%E5%88%92/TEB%E7%AE%97%E6%B3%95/TEB%E6%89%80%E6%9C%89%E5%8F%82%E6%95%B0%E5%90%AB%E4%B9%89/#%E8%AF%9D%E9%A2%98
TebLocalPlannerROS:
odom_topic: odom # 里程计坐标系
map_frame: odom # 所使用的地图参考系,???
# Trajectory params
teb_autosize: True # 优化期间允许改变轨迹的时域长度
dt_ref: 0.45
dt_hysteresis: 0.1
min_samples: 2
max_samples: 500
force_reinit_new_goal_dist: 1.0
global_plan_overwrite_orientation: True
global_plan_viapoint_sep: -0.1
max_global_plan_lookahead_dist: 3.0
force_reinit_new_goal_dist: 1.0
feasibility_check_no_poses: 5
publish_feedback: false
shrink_horizon_backup: true
allow_init_with_backwards_motion: true
exact_arc_length: false
shrink_horizon_min_duration: 10.0
# Obstacles
min_obstacle_dist: 0.13
include_costmap_obstacles: True
costmap_obstacles_behind_robot_dist: 1.0
obstacle_poses_affected: 7
costmap_converter_plugin: ""
costmap_converter_spin_thread: True
costmap_converter_rate: 5
# Optimization
no_inner_iterations: 5
no_outer_iterations: 4
optimization_activate: True
optimization_verbose: False
penalty_epsilon: 0.1
weight_max_vel_x: 1
weight_max_vel_theta: 1
weight_acc_lim_x: 1
weight_acc_lim_theta: 1
weight_kinematics_nh: 1000
weight_kinematics_forward_drive: 60
weight_kinematics_turning_radius: 1
weight_optimaltime: 1
weight_obstacle: 50
weight_dynamic_obstacle: 10 # not in use yet
selection_alternative_time_cost: False # not in use yet
# Homotopy Class Planner
enable_homotopy_class_planning: False
enable_multithreading: True
simple_exploration: False
max_number_classes: 4
roadmap_graph_no_samples: 15
roadmap_graph_area_width: 5
h_signature_prescaler: 0.5
h_signature_threshold: 0.1
obstacle_keypoint_offset: 0.1
obstacle_heading_threshold: 0.45
visualize_hc_graph: False