eccv2020 目标检测笔记
带方向目标的检测
PIoU Loss: Towards Accurate Oriented Object Detection in Complex Environments
作者 | Zhiming Chen, Kean Chen, Weiyao Lin, John See, Hui Yu, Yan Ke, Cong Yang
单位 | 扩博智能Clobotics;上海交通大学;多媒体大学
论文 | https://arxiv.org/abs/2007.09584
代码 | https://github.com/clobotics/piou
备注 | ECCV 2020 Spotlight
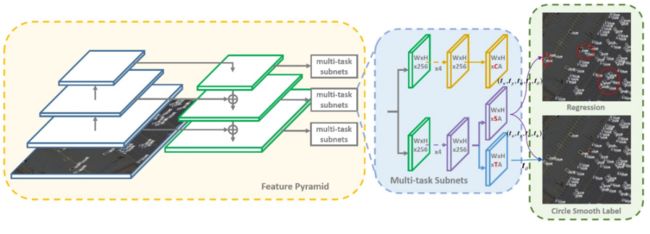
Arbitrary-Oriented Object Detection with Circular Smooth Label
作者 | Xue Yang, Junchi Yan
单位 | 上海交通大学
论文 | https://arxiv.org/abs/2003.05597
代码 https://github.com/Thinklab-SJTU/CSL_RetinaNet_Tensorflow
目标检测新范式
End-to-End Object Detection with Transformers
作者 | Nicolas Carion, Francisco Massa, Gabriel Synnaeve, Nicolas Usunier, Alexander Kirillov, Sergey Zagoruyko
单位 | Facebook AI
论文 | https://arxiv.org/abs/2005.12872
代码 | https://github.com/facebookresearch/detr (目前已有4.8K星)
https://github.com/Thinklab-SJTU/CSL_RetinaNet_Tensorflow
resnet50_v1, resnet101_v1
多目标检测和跟踪
Chained-Tracker: Chaining Paired Attentive Regression Results for End-to-End Joint Multiple-Object Detection and Tracking
作者 | Jinlong Peng, Changan Wang, Fangbin Wan, Yang Wu, Yabiao Wang, Ying Tai, Chengjie Wang, Jilin Li, Feiyue Huang, Yanwei Fu
单位 | 腾讯优图实验室;复旦大学;NAIST
论文 | https://arxiv.org/abs/2007.14557
代码 | https://github.com/pjl1995/CTracker
模型 150m,一张图片100多ms
目标检测、实例分割、姿态估计全家桶
Point-Set Anchors for Object Detection, Instance Segmentation and Pose Estimation
作者 | Fangyun Wei, Xiao Sun, Hongyang Li, Jingdong Wang, Stephen Lin
单位 | 微软亚洲研究院;北大
论文 | https://arxiv.org/abs/2007.02846
代码 | https://github.com/FangyunWei/PointSetAnchor
密集目标检测
BorderDet: Border Feature for Dense Object Detection
作者 | Han Qiu, Yuchen Ma, Zeming Li, Songtao Liu, Jian Sun
单位 | 旷视科技;西安交通大学
论文 | https://arxiv.org/abs/2007.11056
代码 | https://github.com/Megvii-BaseDetection/BorderDet
备注 | ECCV 2020 Oral
该文提出了一种非常简单、高效的操作来提取物体边界极限点的特征,叫做“BorderAlign”。模型只增加很少的时间开销,可以在经典模型上实现FCOS(38.6 v.s. 41.4). FPN(37.1 v.s. 40.7)。