基于卷积神经网络和热力图回归的非结构化道路消失点检测 论文解读
Unstructured Road Vanishing Point Detection Using the Convolutional Neural Network and Heatmap Regression(URVP)
基于卷积神经网络和热图回归的非结构化道路消失点检测
前言:20年的一篇文章,是关于非结构化道路VP检测中第一篇基于深度学习的解决方案。之前读过,这里再读一下,顺便再跑一下程序。
原文链接:
https://arxiv.org/abs/2006.04691
源代码:
https://github.com/qd213618/URVP
引用信息:
@article{liu2020unstructured,
title={Unstructured Road Vanishing Point Detection Using the Convolutional Neural Network and Heatmap Regression},
author={Liu, Yin-Bo and Zeng, Ming and Meng, Qing-Hao},
journal={arXiv preprint arXiv:2006.04691},
year={2020}
}
摘要
- 轻量化骨架:depthwise convolution modified HRNet。用于提取非结构化道路的层次特征
- VP检测:multi-scale supervised learning + heatmap super-resolution + coordinate regression
- 在Kong数据集上达到了33fps
引言
消失点定义:在三维场景中,一组平行线的透视投影在图像平面上的交点。
自动驾驶车辆可根据消失点辨别可行驶区域。
heatmap regression:可用于估计图像中像素级关键点的位置,然而传统的heatmap regression只在输入图像的1/4或1/2单一的粗尺度上估计关键点,无法满足高精度的要求。而HRNet无法满足高实时性要求,因此本文对HRNet进行了修正,同时采用三个tricks:(multi-scale supervised learning + heatmap super-resolution + coordinate regression)
同时,本文也贡献了含有5355张带有标注的数据集(unstructured road vanishing point ,URVP)
关于道路消失点检测的传统方法中,基于边缘和基于区域用于结构化道路,基于纹理的方法可用于非结构化道路,但存在两个问题:
- 性能容易受到光照不均匀和图像分辨率等因素的影响,检测结果往往不稳定
- 处理非常耗时,不能满足实时性要求
本文方法
- depthwise convolution modified HRNet:提取图像特征
- multiscale heatmap supervised learning:获得准确的VP点估计(结合1/4和1/2尺度的热力图)
- coordinate regression:获得准确的VP坐标
图1显示了网络架构。

多尺度监督学习
多尺度监督学习:在关键点检测中混合两个或以上热力图。
1/4尺度热力图:在原图中会造成4倍的误差放大。所以采用基于反投影的超分辨率技术(the back-projection-based super-resolution technique)从1/4尺度得到1/2尺度的超分辨率热力图。
图2显示了上采样方法。
从1/4→1/2尺度有下图所示三种方法。本文采用第二种:up-projection unit (UPU)方法。
upsample模块的输入是feature map和预测的1/4比例尺热图的拼接(concatenation)
- Deconv:5x5 deconvolution + BatchNorm + ReLU
- Conv:3x3 convolution + BatchNorm + ReLU

坐标回归
从热力图中获取关键点坐标的两个传统方法:提取热图中最大点的坐标或通过高斯分布估计关键点的位置;缺点如下:
- 误差同样会放大相应的倍数。(1/4尺度的热力图会放大4倍,1/2尺度热力图会放大2倍)
- 计算量大,达不到实时性要求。
因此本文采用坐标回归模块直接输出准确的VP点坐标。思路来源于YOLOv2,YOLOv2中证明,在二维坐标回归中,对单元偏移量的预测是一种稳定、准确的方法。因此,预测点(Vx,Vy)定义如下:

f(·):VP的sigmoid函数
(cx,cy):相关网格单元的左上角的坐标
损失函数
![]()
本文的一些设置如下:
lcoord:VP点的坐标损失。logistic regression
lh1:1/4尺度热力图损失。MSE
lh2:1/2尺度热力图损失。MSE
lconf:置信度(confidence)损失。logistic regression
λconf=0.5:不含VP的cells
λconf=1:含VP的cells
λcoord=2和λh=1:用于平衡热力图和和坐标回归的平衡。
实验
实验细节
Pytorch 1.3
dual RTX 2080 Ti
CUDA 10
[email protected]
URVP作为训练集;Kong作为测试集
输入图像尺寸:320x320
给所有ground truth热力图添加上std=3的Gaussian kernel
SGD
backbone:开始时lr=0.001
网络其他部分:开始时lr=0.01
每20个epoch将lr除10,momentum=0.9
数据增强:随机翻转和图像旋转
数据集
目前用于非结构化道路VP检测的数据集只有两个:Kong-1003张;Moghadam-500张
URVP:利用Flickr和谷歌Image工具构建的一个新的训练数据集
评价指标
标准化欧氏距离来测量预测的VP点和ground truth VP点之间的距离。

Pg:ground truth
Pv:预测的
Diag(I):输入图片的对角线长度
NormDist>=0.1的置为0.1,认为预测失败。
图3显示了关于热力图尺度对比效果。
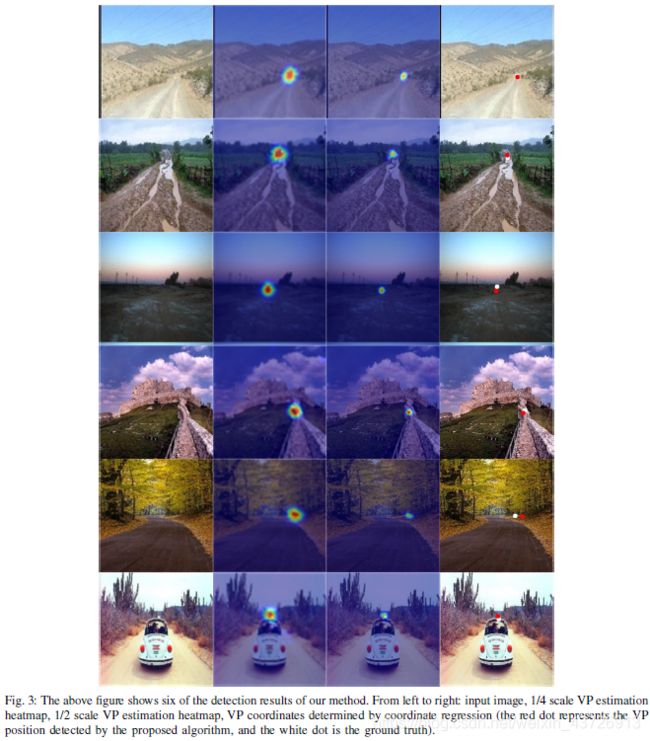
(从左到右依次是:输入,1/4尺度VP估计,1/2尺度VP估计,本文方法估计)
(白点是ground truth,红点是本文方法预测点。)
图4显示了不同方法对比效果。
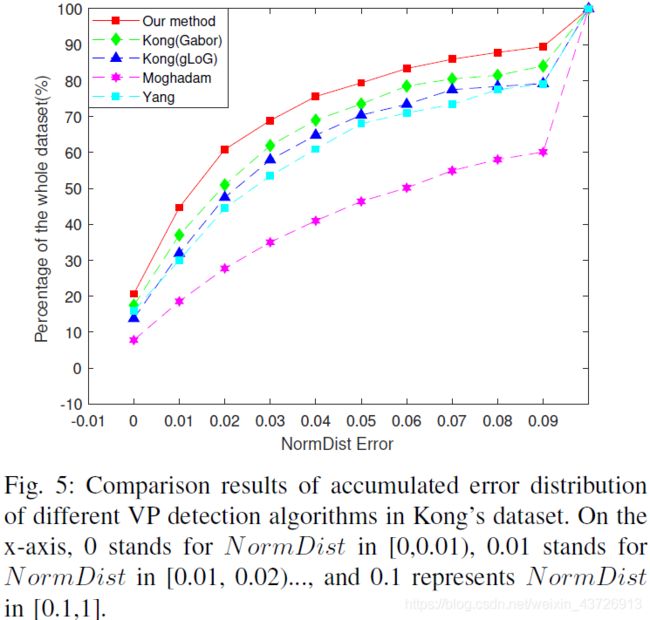
图5显示了用NormDist度量的效果对比。

消融研究
骨架网络

Hourglass (Stack = 4) (Hg4)
HRNet (W = 48)(HRNet-48)
多尺度监督学习

上采样模块

坐标回归

结论
下一步:多任务学习