opencv——图像阈值设定及常见的滤波操作
1、图像阈值
ret,dst=cv2.threshold(src,thresh,maxval,type)
src:输入图,只能是单通道图,也就是灰度图。
thresh:阈值。
maxval:当像素超过了阈值,所赋予的值。
type:二值化操作的类型,包括binary,binary_iny,trunc,tozero,tozero_iny。
binary——超过阈值部分取maxval,否则取0
binary_iny——和binary相反
trunc——大于阈值部分设为阈值,否则不变
tozero——大于阈值部分不改变,否则为0
tozero_iny——与tozero相反
ret,thresh1=cv2.threshold(img_gray,127,255,cv2.THRESH_BINARY)
ret,thresh2=cv2.threshold(img_gray,127,255,cv2.THRESH_BINARY_INY)
ret,thresh3=cv2.threshold(img_gray,127,255,cv2.THRESH_TRUNC)
ret,thresh4=cv2.threshold(img_gray,127,255,cv2.THRESH_TOZERO)
ret,thresh5=cv2.threshold(img_gray,127,255,cv2.THRESH_TOZERO_INY)
titles=["Original Image","BINARY","BINARY_INY","TRUNC","TOZERO","TOZERO_INY"]
images=[image,thresh1,thresh2,thresh3,thresh4,thresh5]
for i in range(6):
plt.subplot(2,3,i+1),plt.imshow(images[i],"gray")
plt.title(titles[i])
plt.xticks([]),plt.yticks([])
plt.show()2、图像平滑处理
步骤1:输入图像
img=cv2.imread("lenaNoise.png")
cv2.imshow("img",img)
cv2.waitkey(0)
cv2.destroyALLWindows()步骤2:均值滤波
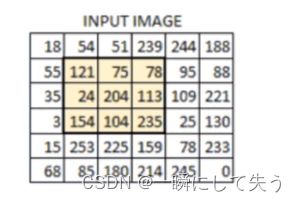
图像滤波后大小:result=[(src+2*P-K)/S]+1
其中src:表示源图像尺寸;
P:指有无填充,一般为全零填充,P=K-1
K:表示滤波尺寸
S:滤波步长
result:滤波后的图像尺寸
blur=cv2.blur(img,(3,3))
cv2.imshow("blur",blur)
cv2.waitkey(0)
cv2.destroyALLWindows()步骤3:方框滤波
当有归一化时,就需要进行归一化,保证其不会超过255,即求均值,和均值滤波相同
无归一化时,则就将滤波器数值相加,超过255的则取255
box=cv2.boxFilter(img,-1,(3,3),normalize=True)#-1表示滤波后的颜色通道和源图像颜色通道保持一致,第三个参数表示是否需要进行归一化处理,保证滤波后不会越界
cv2.imshow("blur",blur)
cv2.waitkey(0)
cv2.destroyALLWindows()3、高斯滤波
步骤1:高斯操作
0.4 |
0.8 |
0.4 |
0.8 |
1 |
0.8 |
0.4 |
0.8 |
0.4 |
如上述滤波模板所示,中间值为标准值,距离中间值越近的权重越大,模板中数值代表权值。
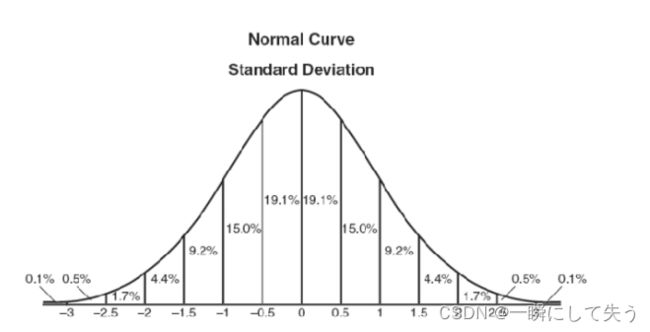
步骤2:高斯滤波
gausssian=cv2.GaussianBlur(img,(5,5),1)
cv2.imshow("gaussian",gaussian)
cv2.waitkey(0)
cv2.destroyALLWindows()步骤3:中值滤波
将滤波器模板的数值从小到大进行排列,取中间的值
median=cv2.medianBlur(img,5)
cv2.imshow("median",median)
cv2.waitkey(0)
cv2.destroyALLWindows()在去除椒盐噪音点时,利用中值滤波的效果比上述滤波更好。
综合对比中值滤波和其他均值滤波的效果:
res=np.hstack(blur,gaussian,median))
print(res)
cv.imshow("median vs average",res)
cv2.waitkey(0)
cv2.destroyALLWindows()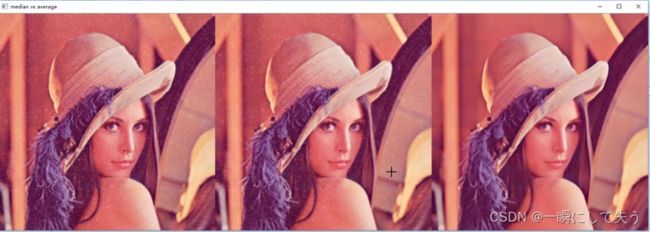
上图中从左到右依次是均值滤波、高斯滤波、中值滤波的效果,可以看出中值滤波的噪音明显少于均值滤波和高斯滤波。