从0学激光slam lesson1~3
一、lesson1 激光特征提取 及bag文件讲解
原因:这是由于 ROS tf 的发布时间晚于 topic 的时间,Rviz 在做 msg 的 tf 变换时,默认把过时的 msg 丢掉。为了解决这一问题,可以让系统以 msg 对应的 simulated time 运行,而不是实际的 wall-clock time.
bag文件的位置需要根据自己 电脑的用户名 来进行配置
首先,要将参数 use_sim_time 设置为true,代表当前ros的时间为bag文件中的时间。
同时,需要在播放bag时加上 –clock 选项,以表示使用bag文件中的时间为ros的当前时间。
重点理解发布和订阅
#录制前
$ rosparam set /use_sim_time false
#播放时
$ rosparam set /use_sim_time true
把播放bag数据集放进launch文件中
if (!std::isfinite(scan_msg->ranges[i])) //std::isfinite 在输入无效值时将返回false,所以进行取反 { // std::cout << " " << i << " " << scan_msg->ranges[i]; continue; }
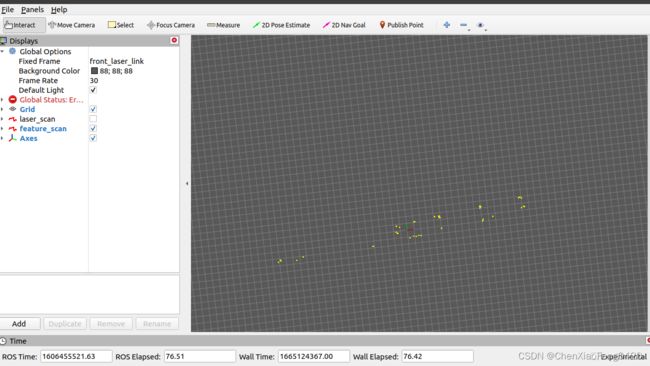
单线雷达提取角点效果如图所示:
二、lesson2 PCL
1、
catkin_create_pkg lesson2 pcl_conversions pcl_ros roscpp sensor_msgs roscpp以及sensor_msgs在之前的文章说过了,roscpp是c++的依赖,sensor_msgs是雷达数据的消息类型的依赖。
pcl_conversions 以及 pcl_ros 是ROS官方为了在ROS中方便的使用PCL而写的包。
pcl_conversions 包含了一些方法,实现了 ROS的消息类型 与 PCL的消息类型 的转换。
pcl_ros 定义了一些其他的功能,如在ROS中使用标准的Publisher直接发布PCL的数据格式、将PCL的点云根据tf进行坐标变换、实现了一些常用的功能接口,使得可以直接在ROS中调用PCL的函数,例如进行体素滤波等等。
具体理解
perception_pcl理解 --- pcl_conversions 与 pcl_ros_李太白lx的博客-CSDN博客_pcl_conversions
2.2 修改CMakeLists.txt
需要在CMakeLists.txt额外添加下面语句,代表我们需要依赖PCL。
find_package(PCL REQUIRED QUIET)
include_directories(
include
${catkin_INCLUDE_DIRS}
${PCL_INCLUDE_DIRS}
)2.3修改Package.xml
需要额外添加如下两句话,代表依赖PCL。
libpcl-all-dev
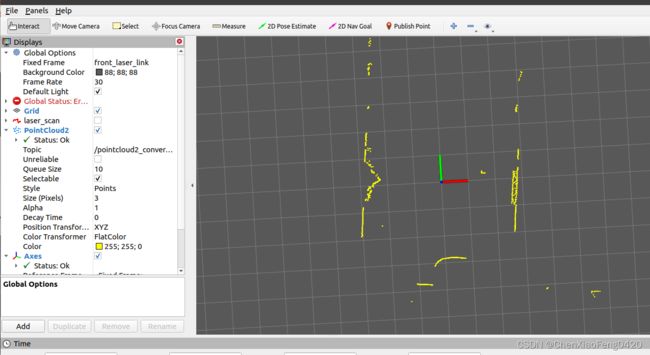
libpcl-all 由于已经配置好了rviz,所以将直接出现下边的图片。
这张图片展示的将sensor_msgs/LaserScan转换成的sensor_msgs/PointCloud2的数据
2.2基于ICP的帧间匹配
上一篇文章讲解了如何将激光雷达的sensor_msgs/LaserScan格式转换成pcl::PointCloud< pcl::PointXYZ>格式, 本篇文章将要讲解如何使用这个格式调用ICP算法进行相邻2帧雷达数据间坐标变换的计算
*
* 构造函数
*/
ScanMatchICP::ScanMatchICP()
{
// \033[1;32m,\033[0m 终端显示成绿色
ROS_INFO_STREAM("\033[1;32m----> Scan Match with ICP started.\033[0m");
laser_scan_subscriber_ = node_handle_.subscribe(
"laser_scan", 1, &ScanMatchICP::ScanCallback, this);
// 第一帧数据的标志
is_first_scan_ = true;
// 指针的初始化
current_pointcloud_ = boost::shared_ptr(new PointCloudT());
last_pointcloud_ = boost::shared_ptr(new PointCloudT());
}
is_first_scan_是第一帧雷达数据到来的标志,因为第一帧数据到来时,只有一帧数据,是没办法进行匹配的,所以要对第一帧数据进行特殊处理.
current_pointcloud_ 与 last_pointcloud_ 分别保存的是当前帧雷达数据转成pcl点云格式后的数据,以及上一帧雷达数据转成pcl点云格式后的数据.
这里是对这两个智能指针进行初始化,他们的类型为 boost::shared_ptr .
Affine3f (有旋转和平移成员)
2.2.3ICP部分
void ScanMatchICP::ScanMatchWithICP(const sensor_msgs::LaserScan::ConstPtr &scan_msg)
{
// ICP 输入数据,输出数据的设置,还可以进行参数配置,这里使用默认参宿
icp_.setInputSource(last_pointcloud_);
icp_.setInputTarget(current_pointcloud_);
// 开始迭代计算
pcl::PointCloud unused_result;
icp_.align(unused_result);
// std::cout << "has converged:" << icp_.hasConverged() << " score: " << icp_.getFitnessScore() << std::endl;
// 如果迭代没有收敛,不进行输出
if (icp_.hasConverged() == false)
{
std::cout << "not Converged" << std::endl;
return;
}
else
{
// 收敛了之后, 获取坐标变换
Eigen::Affine3f transfrom;
transfrom = icp_.getFinalTransformation();
// 将Eigen::Affine3f转换成x, y, theta, 并打印出来
float x, y, z, roll, pitch, yaw;
pcl::getTranslationAndEulerAngles(transfrom, x, y, z, roll, pitch, yaw);
std::cout << "transfrom: (" << x << ", " << y << ", " << yaw * 180 / M_PI << ")" << std::endl;
}
}
2.2.4ros的理解
构造函数中创建需要的,和节柄等, 关键在于构造函数中创建的订阅者, 订阅的话题,和回调函数, 回调函数之后, 每接受一次,就会调用该函数,
重点理解这个回调函数的使用
void ScanMatchICP::ScanCallback(const sensor_msgs::LaserScan::ConstPtr &scan_msg)
{
// step1 进行数据类型转换
std::chrono::steady_clock::time_point start_time = std::chrono::steady_clock::now();
// 对第一帧数据进行特殊处理
if (is_first_scan_ == true)
{
// 进行第一帧数据的处理,只转换数据类型 并 保存到current_pointcloud_
ConvertScan2PointCloud(scan_msg);
is_first_scan_ = false;
return;
}
else
// 在将新一帧数据转换到当前帧之前,
// 先将current_pointcloud_赋值到last_pointcloud_进行保存
*last_pointcloud_ = *current_pointcloud_;
// 进行数据类型转换
ConvertScan2PointCloud(scan_msg);
std::chrono::steady_clock::time_point end_time = std::chrono::steady_clock::now();
std::chrono::duration time_used = std::chrono::duration_cast>(end_time - start_time);
std::cout << "\n转换数据格式用时: " << time_used.count() << " 秒。" << std::endl;
// step2 使用ICP计算 雷达前后两帧间的坐标变换
start_time = std::chrono::steady_clock::now();
// 调用ICP进行计算
ScanMatchWithICP(scan_msg);
end_time = std::chrono::steady_clock::now();
time_used = std::chrono::duration_cast>(end_time - start_time);
std::cout << "ICP计算用时: " << time_used.count() << " 秒。" << std::endl;
}
效果如图所示
1、ICP计算的需要讲雷达的msgs scan转化为 pointcloud 格式,
- scan_to_cloud_converter: 将 sensor_msgs/LaserScan 数据转成 sensor_msgs/PointCloud2 的数据格式.
- 也可以手动
2、 发布显示的仍然是 msgs中的 laser_scan 格式
