GPS伪距绝对定位计算成都某点的坐标
文章目录
- 一、伪距单点绝对定位计算方法
-
- 1.1 数据处理
- 1.2 精度评定
- 二、原始数据及处理
- 三、计算代码分析
-
- 3.1 坐标系转换模块——coordinate_transport
- 3.2 读取数据和伪距单点定位计算模块——Point_positioning
- 3.3 结果输出模块——Main
- 四、结果展示
- 五、感想心得
- 六、源代码
-
- 6.1 坐标转换模块
- 6.2 单点定位模块
- 6.3 计算绘图模块
一、伪距单点绝对定位计算方法
1.1 数据处理
1.2 精度评定
二、原始数据及处理
如图,这是原始的数据
从第二列开始,依次是X坐标、Y坐标、Z坐标、伪距和权值,由于不需要一“>”开头的那一行,所以在处理的时候去掉。将每个历元都分开成一个单独的csv文件,这样方便计算不同历元的坐标,处理这个文件的代码如下所示:
main_file = open("你的所在文件路径\\expt2021106.txt", 'r')
i = 0
for lines in main_file:
if lines[0] == '>':
i += 1
continue
file = open("C:\\Users\\13499\\Desktop\\Data\\" + str(i) + ".csv", 'a')
file.write(lines.replace(' ', ',').replace(',,, ', ',').replace(',,,', ',').replace(' ', ',').replace(',,', ','))
file.close()
main_file.close()
处理完之后,每个历元的数据都被单独分成了一个csv文件,如下图所示:
这样就方便遍历计算了。
三、计算代码分析
3.1 坐标系转换模块——coordinate_transport
此部分就是将空间直角坐标系转为经纬度坐标系,即:XYZ→BLH,涉及到大地测量学的知识,此处不多赘述,直接放上代码:
# -*- coding: utf-8 -*-
import math
def xyz2blh(xyz):
blh = [0, 0, 0]
a = 6378137.0
f = 1.0 / 298.257223563
e2 = f * (2 - f)
r2 = xyz[0] * xyz[0] + xyz[1] * xyz[1]
z = xyz[2]
zk = 0.0
while abs(z - zk) >= 0.0001:
zk = z
sinp = z / math.sqrt(r2 + z * z)
v = a / math.sqrt(1.0 - e2 * sinp * sinp)
z = xyz[2] + v * e2 * sinp
if r2 > 1E-12:
blh[0] = math.atan(z / math.sqrt(r2))
blh[1] = math.atan2(xyz[1], xyz[0])
else:
if r2 > 0:
blh[0] = math.pi / 2.0
else:
blh[0] = -math.pi / 2.0
blh[1] = 0.0
blh[2] = math.sqrt(r2 + z * z) - v
return blh
3.2 读取数据和伪距单点定位计算模块——Point_positioning
首先,导入numpy库和刚刚在coordinate_transport模块中写好的坐标转换函数xyz2blh。
import numpy as np
from coordinate_transport import xyz2blh
由于涉及到角度转换,所以先写一个将弧度制转为十进制的函数:
def rad2deg(rad):
"""
this function can turn rad_type angle into deg_type angle
:param rad: rad_type angle
:return: deg_type angle
"""
return rad / np.pi * 180
读入数据的时候,由于读入时为字符串,而计算时需要使用浮点数,所以先写一个将字符串列表转为浮点数列表的函数:
def str2float(li):
"""
turn string list into float list
:param li: string list
:return: float list
"""
for i in range(len(li)):
li[i] = float(li[i])
return li
然后是读取数据的代码,在3.1中,我们已经将每个历元的数据都处理成了单独的csv文件,所以只要单个读取再遍历即可。这里我们将读取一个csv文件的代码封装成函数,返回五个列表,分别为X,Y,Z坐标、伪距和方差。
def read_data(data_path):
"""
this function can read the data I need for this task
:param data_path: the path of csv file
:return: the data in csv file
"""
file = open(data_path, 'r')
x = []
y = []
z = []
c_range = []
var = []
line_num = 0
for lines in file:
temp_str = lines.strip('\n')
temp_list = temp_str.split(",")
x.append(temp_list[1])
y.append(temp_list[2])
z.append(temp_list[3])
c_range.append(temp_list[4])
var.append(temp_list[5])
line_num += 1
if line_num == 4:
break
file.close()
x = str2float(x)
y = str2float(y)
z = str2float(z)
c_range = str2float(c_range)
var = str2float(var)
return x, y, z, c_range, var
做完准备工作之后,就可以开始写伪距单点定位的计算代码了。伪距单点定位其实就是一个最小而成求解的过程,非常简单。首先定义光速,并且将初始坐标设为(0,0,0)
def point_position(x, y, z, c_range, var):
c = 299792458
x0, y0, z0 = 0, 0, 0 # initial coordinate
然后组成设计矩阵A和观测向量L,组成的方法直接照着书上的公式就可以了,这里不细讲:
R = np.mat(np.zeros((4, 1))) # approximate geometric distance
l = np.mat(np.zeros((4, 1))) # first column of the design matrix
m = np.mat(np.zeros((4, 1))) # second column of the design matrix
n = np.mat(np.zeros((4, 1))) # third column of the design matrix
L = np.mat(np.zeros((4, 1))) # observation vector
for j in range(len(x)):
R[j, 0] = np.sqrt((x[j] - x0) ** 2 + (y[j] - y0) ** 2 + (z[j] - z0) ** 2)
l[j, 0] = (x[j] - x0) / R[j, 0]
m[j, 0] = (y[j] - y0) / R[j, 0]
n[j, 0] = (z[j] - z0) / R[j, 0]
L[j, 0] = c_range[j] - R[j, 0]
A = np.hstack((l, m, n, np.mat([[c], [c], [c], [c]]))) # design matrix
然后组成权阵P,权阵的组成就是将上面读取的权值放在对角线上即可:
P = np.mat(
[[var[0], 0., 0., 0.], [0., var[1], 0., 0.], [0., 0., var[2], 0.], [0., 0., 0., var[3]]]) # weigh
然后利用最小二乘法计算改正数:
X = -(A.T * P * A).I * (A.T * P * L)
每次循环之后都将初始坐标加上改正数,经过五次循环后大概就收敛了。
x0, y0, z0 = x0 + X[0, 0], y0 + X[1, 0], z0 + X[2, 0]
至此,已经计算出了坐标,单点定位基本实现了。接下来是一些DOP值的计算,利用误差传播定律计算即可
QY = (A.T * P * A).I # cofactor matrix
QX = QY[[0, 1, 2]]
QX = QX[:, [0, 1, 2]]
blh = xyz2blh([x0, y0, z0]) # B--rad,L--rad
B, L = blh[0], blh[1]
rotate = np.mat([[-np.sin(B) * np.cos(L), -np.sin(B) * np.sin(L), np.cos(B)], [-np.sin(L), np.cos(L), 0],
[np.cos(B) * np.cos(L), np.sin(B) * np.sin(L), np.sin(B)]]) # rotate matrix
QR = rotate * QX * rotate.T
HDOP = np.sqrt(QR[0, 0] + QR[1, 1])
VDOP = np.sqrt(QR[2, 2])
PDOP = np.sqrt(QX[0, 0] + QX[1, 1] + QX[2, 2])
TDOP = np.sqrt(QY[3, 3])
GDOP = np.sqrt(QX[0, 0] + QX[1, 1] + QX[2, 2] + QY[3, 3])
3.3 结果输出模块——Main
这里我们要将每个历元的计算结果绘制成图,所以先导入绘图库和刚刚写好的单点定位模块
from Point_positioning import read_data, point_position
import matplotlib.pyplot as plt
定义主函数main,一共有1284个历元,所以利用一个遍历,计算处每个历元的X、Y、Z坐标,并分别存如三个列表中,然后修改plt.plot(hengzhou,X)中的X即可绘制出X或Y或Z随不同历元的变化图。
def main():
X = []
Y = []
Z = []
for i in range(0, 1284):
path = 'C:\\Users\\13499\\Desktop\\Data\\' + str(i) + '.csv'
x, y, z, c_range, var = read_data(path)
x0, y0, z0 = point_position(x, y, z, c_range, var)
X.append(x0)
Y.append(y0)
Z.append(z0)
hengzhou = [i for i in range(0, 1284)]
plt.plot(hengzhou, X)
plt.show()
然后运行主函数即可:
if __name__ == '__main__':
main()
四、结果展示
计算出的X坐标随历元变化图如下图所示:
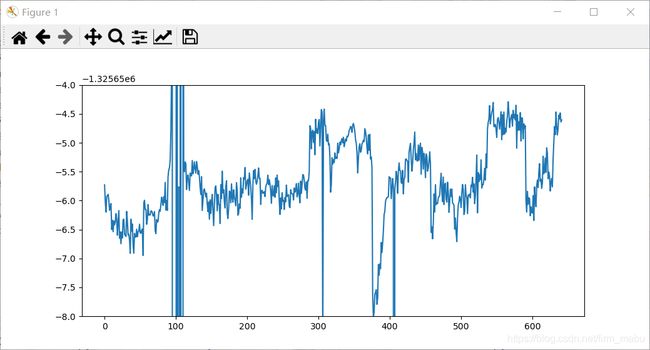
Y坐标:
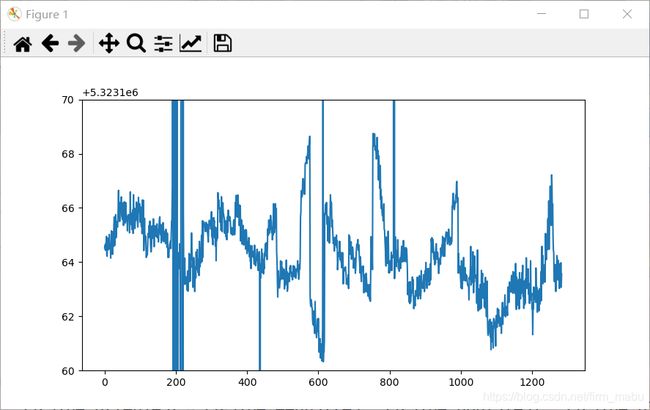
Z坐标:
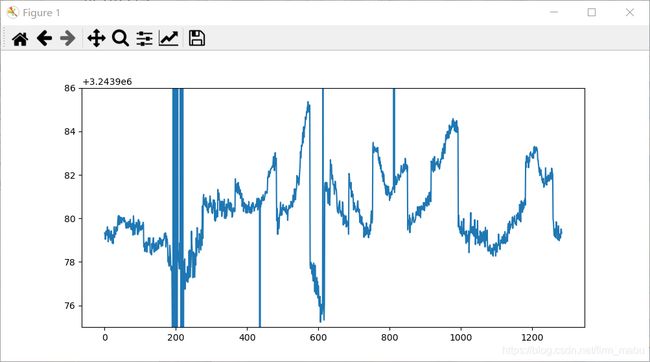
从上面可以看出,有几个历元的数据是有问题的,但是问题出在哪我暂时也找不到,这就是需要继续学习的地方吧。从上面计算出的数据挑出一个显示在地图上,发现在成都某说唱学校的图书馆附近(图中红色的点):

五、感想心得
终于写出来一次大作业了,我也太菜了。
六、源代码
6.1 坐标转换模块
# -*- coding: utf-8 -*-
import math
def xyz2blh(xyz):
blh = [0, 0, 0]
a = 6378137.0
f = 1.0 / 298.257223563
e2 = f * (2 - f)
r2 = xyz[0] * xyz[0] + xyz[1] * xyz[1]
z = xyz[2]
zk = 0.0
while abs(z - zk) >= 0.0001:
zk = z
sinp = z / math.sqrt(r2 + z * z)
v = a / math.sqrt(1.0 - e2 * sinp * sinp)
z = xyz[2] + v * e2 * sinp
if r2 > 1E-12:
blh[0] = math.atan(z / math.sqrt(r2))
blh[1] = math.atan2(xyz[1], xyz[0])
else:
if r2 > 0:
blh[0] = math.pi / 2.0
else:
blh[0] = -math.pi / 2.0
blh[1] = 0.0
blh[2] = math.sqrt(r2 + z * z) - v
return blh
6.2 单点定位模块
# -*- coding: utf-8 -*-
import numpy as np
from coordinate_transport import xyz2blh
def rad2deg(rad):
"""
this function can turn rad_type angle into deg_type angle
:param rad: rad_type angle
:return: deg_type angle
"""
return rad / np.pi * 180
def str2float(li):
"""
turn string list into float list
:param li: string list
:return: float list
"""
for i in range(len(li)):
li[i] = float(li[i])
return li
def read_data(data_path):
"""
this function can read the data I need for this task
:param data_path: the path of csv file
:return: the data in csv file
"""
file = open(data_path, 'r')
x = []
y = []
z = []
c_range = []
var = []
line_num = 0
for lines in file:
temp_str = lines.strip('\n')
temp_list = temp_str.split(",")
x.append(temp_list[1])
y.append(temp_list[2])
z.append(temp_list[3])
c_range.append(temp_list[4])
var.append(temp_list[5])
line_num += 1
if line_num == 4:
break
file.close()
x = str2float(x)
y = str2float(y)
z = str2float(z)
c_range = str2float(c_range)
var = str2float(var)
return x, y, z, c_range, var
def point_position(x, y, z, c_range, var):
c = 299792458
x0, y0, z0 = 0, 0, 0 # initial coordinate
for i in range(5):
R = np.mat(np.zeros((4, 1))) # approximate geometric distance
l = np.mat(np.zeros((4, 1))) # first column of the design matrix
m = np.mat(np.zeros((4, 1))) # second column of the design matrix
n = np.mat(np.zeros((4, 1))) # third column of the design matrix
L = np.mat(np.zeros((4, 1))) # observation vector
for j in range(len(x)):
R[j, 0] = np.sqrt((x[j] - x0) ** 2 + (y[j] - y0) ** 2 + (z[j] - z0) ** 2)
l[j, 0] = (x[j] - x0) / R[j, 0]
m[j, 0] = (y[j] - y0) / R[j, 0]
n[j, 0] = (z[j] - z0) / R[j, 0]
L[j, 0] = c_range[j] - R[j, 0]
A = np.hstack((l, m, n, np.mat([[c], [c], [c], [c]]))) # design matrix
P = np.mat(
[[var[0], 0., 0., 0.], [0., var[1], 0., 0.], [0., 0., var[2], 0.], [0., 0., 0., var[3]]]) # weight matrix
X = -(A.T * P * A).I * (A.T * P * L)
x0, y0, z0 = x0 + X[0, 0], y0 + X[1, 0], z0 + X[2, 0]
QY = (A.T * P * A).I # cofactor matrix
QX = QY[[0, 1, 2]]
QX = QX[:, [0, 1, 2]]
blh = xyz2blh([x0, y0, z0]) # B--rad,L--rad
B, L = blh[0], blh[1]
rotate = np.mat([[-np.sin(B) * np.cos(L), -np.sin(B) * np.sin(L), np.cos(B)], [-np.sin(L), np.cos(L), 0],
[np.cos(B) * np.cos(L), np.sin(B) * np.sin(L), np.sin(B)]]) # rotate matrix
QR = rotate * QX * rotate.T
HDOP = np.sqrt(QR[0, 0] + QR[1, 1])
VDOP = np.sqrt(QR[2, 2])
PDOP = np.sqrt(QX[0, 0] + QX[1, 1] + QX[2, 2])
TDOP = np.sqrt(QY[3, 3])
GDOP = np.sqrt(QX[0, 0] + QX[1, 1] + QX[2, 2] + QY[3, 3])
# print(HDOP, VDOP, PDOP, TDOP, GDOP)
return x0, y0, z0
6.3 计算绘图模块
from Point_positioning import read_data, point_position
import matplotlib.pyplot as plt
def main():
X = []
Y = []
Z = []
for i in range(0, 1284):
path = 'C:\\Users\\13499\\Desktop\\Data\\' + str(i) + '.csv'
x, y, z, c_range, var = read_data(path)
x0, y0, z0 = point_position(x, y, z, c_range, var)
X.append(x0)
Y.append(y0)
Z.append(z0)
hengzhou = [i for i in range(0, 1284)]
plt.plot(hengzhou, Z)
plt.show()
if __name__ == '__main__':
main()