这篇文章是基于上一篇文章的研究上进行的,使得路径更加的平滑和自然,特此记录。有错误欢迎大家批评指正。如需转载请注明出处,http://www.cnblogs.com/Leonhard-/p/6866070.html,这是对作者最起码的尊重,谢谢大家。
本文结构如下:
一、Theta*算法、LazyTheta*算法背景介绍
二、Lazy Theta*算法介绍与实现简述
三、深入思考优化需求
1.网格中的阻挡判定
2.效果受A*算法影响
3.lazy theta* cost的限制
四、总结
一、Theta*算法、LazyTheta*算法背景介绍
在上一篇文章中,考虑的是用A*得到一条“最优”的算法,且尽可能的去防止玩家选择上的“抖动”。这里“最优”是基于一个前提,那就是必须沿着地图网格里的格子,一个格子一个格子的跳,像跳棋一样,也就是说,角色移动的角度只能是45的倍数。一条可能的移动路径如下:

这又出现了新问题,假设我们在现实生活中,走路会这么走吗?这让我们的寻路显得非常的僵硬。那最直接的方法就是直接从起点直接走向终点。那此时允许角色往任意角度移动的Theta*算法就派上了用场,而LazyTheta*在Theta*上做了一个性能优化,只对其中的一部分有必要处理的点进行处理。本文的目的就是讨论在二维网格地图上使用lazy theta*算法。
二、Lazy Theta*算法介绍与实现简述
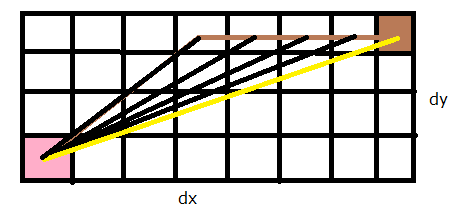
theta*算法和lazy theta*算法和A*算法大部分是一样的,只是theta*类算法比A*多了一个收缩父节点的操作,具体的theta*算法和lazy theta*算法的介绍可以参看这篇blog,这里就不再对重复的内容进行复制粘贴。这里简单的对实现思路进行一个简要的描述,如上图的路径,我们发现其实不需要记录A*算法结果的每一个点,只需要记录起点(s)和终点(d)还有拐角的点(p)三点即可,中间的值就可以通过插值得出。此时,我们把p把的父节点记录为s,而d的父节点记录为p。这样的话,在我们利用A*计算路径的过程之后,将A*算法得到的路径节点进行一一的检测,如果pcurrent、pcurrent->parent和pcurrent->parent->parent三点共线,那么我们直接把pcurrent->parent = pcurrent->parent->parent(A* with post-smoothed paths)。而theta算法,则在此基础上进一步优化,当我们把节点加入到open队列时,我们对该节点进行测试,如果pcurrent和pcurrent->parent->parent之间是否存在一条路径,则把pcurrent->parent = pcurrent->parent->parent并重新设置pcurrent的cost值,如果不存在就什么都不做。而Lazy theta*则是,把节点测试放到了节点从heap里弹出之后,减少了不必要的节点计算。下图为计算的过程。黑色斜线为中间计算结果,黄色线段为最后的结果,也就是说,在这幅图里,Lazy theta*的最终结果就是两个点,起点和终点。
三、深入思考优化需求
1.网格中的阻挡判定
在之前的A*算法寻路中,要判定一个格子是否被占用,只需要对MapManager进行一次查询操作即可,但是现在的移动是任意角度的移动,这需要进一步考虑如何判定任意两个点之间是否存在一条路径。以dx>dy >0的情况为例子。
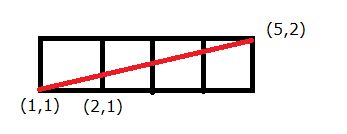
此时,当我们要判定当X=2时,在地图上是否能够通过时,此时我们需要判定(2,1)和(2,2)两个点的可达性,如果两点都可达,那么直线上的点在X=2时才可达。(也可以只判定一个点,但是这我们项目里,也可能会出现奇怪的现象,具体情况具体分析。而计算方法则可以通过给出直线方程的隐式方程来快速计算)
2.效果受A*算法影响
theta*算法可以优化A*的路径,但是如果A*算法部分做的不够好的话,theta*效果会大打折扣。下面以例子说明。
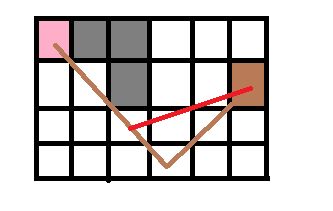
如果A*的寻路结果如棕色线条时,我们期待的theta*优化结果如红色线条所示,但是,实际上拐角左边的线上的每一个点的parent都为s点,当进行拐角右边路线规划时,会计算该条线上每一点与source点的可达性,但是如图所示,此时的每一条线段是不可达的,所以,这种情况红色线条的优化不会发生。如果要让红色线条被优化的话,需要参照上一篇文章,修改A*的估值函数来实现。
3.lazy theta* cost的限制
如果优化线条成立,那么就得给予被优化的节点一个新的cost值。那么这个cost值有什么要求呢?这起码得符合三角形法则(斜边不能大于两边之和,也不能小于两边之差)。否则,在特殊的情况下会出现意想不到的问题,例如下图,按理说,走的10->20->30是最短的路径,但是因为优化路径的奇怪权值,会导致结果按100->200走。

四、总结
theta*算法可以让路径规划先得平滑自然,而且可以实现任意角度朝向的移动,还可以很方便的实现非网格地图的寻路计算。但是这相比A*算法也会增加额外的计算量,具体使用时,需要在效果和性能中间做一个权衡。