深度图像确定目标距离_技术交流一种距离选通水下激光成像系统设计与实验研究...
目前使用较多的水下成像方式是水下自然光照射下高灵敏度高帧频数字相机拍摄与录像,这种方式虽然工程应用成熟,但成像距离受水质影响严重,故此种成像方式获得的视频图像大部分对比度、清晰度不够,细节分辨能力较差,不能完全满足水下工程作业实况观测的需求,故研究一种成像距离较远、成像更清晰、细节分辨能力更好的水下成像方式很有意义。1963年人们在研究水对光波的透射性时发现波段在470~680nm之间的蓝绿激光在水中传输时衰减较其他波段小很多,很适合于水下应用。随着激光技术的发展,具有高强度、高准直性和高单色性的激光光源被研制出来,于是基于蓝绿激光透射窗口的水下激光成像系统设计与研究慢慢兴起。
加拿大1990年开始了这方面的研究,至2009年共设计了三代产品:LUCIE1、LUCIE2和LUCIE3,其中第三代系列产品可在7.35倍衰减长度距离对竖条纹靶成像分辨。美国的SPARTA公司在1994年研制的See Ray距离选通成像系统能探测到6.4倍衰减长度的目标。另外,丹麦、瑞典、新加坡等国在这方面也分别取得了一些突破,成功研制了一些水下激光成像系统。
鉴于国外技术封锁,国内应用需求较少,且研究成本较大,故国内关于水下蓝绿激光成像系统的研究进展缓慢,鲜有工程应用的产品与实例。本文借鉴国外设计思想,设计了一种距离选通水下激光成像系统,介绍了其工作原理、系统组成及功能模块,分析了其工作流程,最后对其水下成像效果进行了实验研究,实验结果显示此距离选通水下激光成像系统较常规自然光被动成像系统成像距离远很多,能达到约6倍衰减长度,且细节分辨能力较好,对水下工程作业高清晰度实况观测具有很好的参考意义。

一、工作原理
水下光电成像探测的两个主要障碍是海水对光线的强烈吸收及严重的后向散射,前者降低系统的探测距离,后者降低图像的对比度进而也降低探测距离。水下激光成像是一种主动光电成像技术,它利用了海水具有蓝绿光学窗口的特性,采用透过率高的蓝绿激光作为水下照明光源,同时采用距离选通技术抑制后向散射,其成像距离明显提高,显著优于普通水下电视。另外,激光光源应为较高脉冲重复频率蓝绿脉冲激光器,成像探测器采用高灵敏度门控选通型ICCD摄像机,其选通时间和帧频可调,增加了后续图像处理的灵活性。
距离选通技术是利用脉冲激光器和选通摄像机,以时间的先后分开不同距离上的散射光和目标的反射光,使由被观察目标反射回来的辐射脉冲刚好在摄像机选通工作的时间内到达摄像机并成像。
水下距离选通成像系统的工作原理如下:如图1(a)所示,激光器产生脉宽极短的激光脉冲通过一定长度的水体后射向目标,在行进过程中,激光脉冲受到水分子和水中悬浮杂质等的散射,一部分散射光会沿反方向返回摄像机,这些散射光属非成像光线,会降低图像的对比度,因此在此期间,摄像机快门一直处于关闭状态,以阻止后向散射进入摄像机。如图1(b)所示,当激光脉冲到达目标被反射时,反射光线仍为等宽度的脉冲光,在目标反射光线返回摄像机的途中,摄像机快门仍然保持关闭,因为这期间后向散射仍然在陆续到达摄像机快门,仅当目标返回脉冲前沿到达摄像机的一刹那,摄像机快门打开,并保持一段时间(称为选通时间),让返回脉冲进入快门,进行曝光成像,然后关闭,曝光时间大体上与激光脉冲的脉宽相比拟或者稍宽。

图1 水下激光距离选通成像系统工作原理
这样就保证了只有极少的后向散射可以进入摄像机,激光脉冲的脉宽越窄,后向散射的影响越小,通常用于深海光电成像的激光脉冲的脉宽应为纳秒量级。从激光器发出激光脉冲到摄像机快门打开之间有时间延迟2T,该延迟量决定了系统可以对距离CT处的目标成像,而激光脉冲的脉宽τ及摄像机的快门开启时间η决定了系统的选通深度。
距离选通成像系统的一个重要特点是观察景深可调,为了能够实现对大范围场景目标进行观察,需要对系统相关参数进行设定。系统观察区域的设定方法如图2所示。

图2 距离选通系统可视区域图示
根据距离选通成像原理,对于处于系统视场范围内的目标不一定可见,而只有当目标既处于系统视场范围内,且处于系统的选通深度(DOG)内时才可见,区域1和区域2不可见。通过调节选通延迟时间可以改变观察距离L,选通延迟时间越大,目标观察距离L越远,二者成比例关系;选通深度可以通过改变ICCD摄像机的曝光时间长短来调节,曝光时间越长,选通深度越大,二者成线性关系。
距离选通成像系统要求成像设备能够在水下微光条件下使用,并且具有外部控制和选通功能,这就要求成像设备具有高灵敏度、高分辨率、高速触发、低背景噪声和足够的增益动态范围等。
系统采用像增强型CCD作为成像设备。它以光纤光锥为中继元件,把微通道板式图像增强器与CCD耦合起来组成微光成像器件。入射光经变焦物镜成像在像增强器的光电阴极上,当光电阴极与微通道板之间加载负电压时,像增强器处于导通状态,此时阴极发射的电子顺利进入MCP通道内,电子在MCP内实现倍增,从MCP输出端射出的电子在高压场作用下加速轰击荧光屏并投射到CCD上,从而实现微光放大;当光电阴极与微通道板之间加载正电压时,像增强器处于关闭状态,由光电阴极发射的电子在反向电压作用下返回光电阴极,无法到达微通道板。因此,快速改变施加电压的正负即可实现像增强器的开启与关闭,以此来实现系统纳秒级时间内选通曝光成像。这样,像增强器的开启关闭起到了摄像机“快门”的作用。
同步控制技术是距离选通成像系统的核心技术,若是不能实现激光器与选通成像摄像机的良好同步,可能将无法得到目标图像。距离选通同步控制技术主要是使激光器和ICCD同步,根据激光器与目标景物的距离、景深确定延时时间及频率,以此来设计同步时序。同步控制主要控制像增强器的开启时间与激光器发射脉冲同步,定时时间由激光脉冲从激光器发射开始传输到目标上,再由目标反射到成像摄像机所需要的时间决定,脉冲宽度取决于目标景深。针对不同的成像距离决定相应的光程时间,得到不同距离所需的延时时间,当需要改变成像距离时,只需改变相应的选通脉冲延时时间。
二、设备组成
距离选通水下激光成像系统物理上由舱内的主控台、水下耐压壳体及二者相连的水密电缆组成。从功能上看,系统主要由激光照明分系统、ICCD成像分系统、距离选通同步控制分系统和显控分系统组成,功能组成结构图如图3所示。
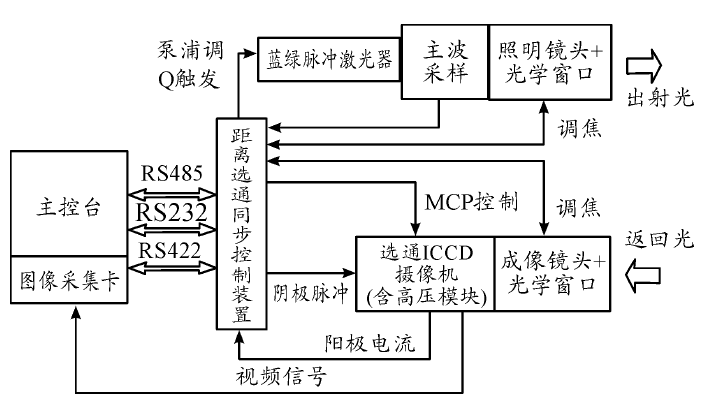
图3 距离选通水下激光成像系统功能组成框图
主控台布置在舱室内,用于对水下装置进行控制以及对采集到的状态及图像数据进行处理、存储和显示等,其余部分将用耐压密封壳体封装,布置在水下,两者之间通过水密电缆连接,水密电缆内含RS232接口、RS485接口、RS422接口、同轴电缆、电源线等,用来传输电源、图像数据、控制指令和状态信息等。
系统采用蓝绿脉冲激光器作为主动照明器,为适应水下不同环境,照明镜头通过调焦可对激光器出射的激光束发散角进行调节,以满足不同距离的照明需求。系统采用门控选通型ICCD摄像机作为成像器,该摄像机具有快门延迟、光圈(快门选通控制信号的占空比)、帧频、MCP增益等的调节功能,成像镜头是变焦镜头,其成像视场与照明视场相匹配,通过同步控制装置协调蓝绿脉冲激光器和门控选通型ICCD摄像机的工作同步,包括激光脉宽、快门延迟时间、选通(积分)时间、光圈(阴极选通脉冲占空比)、帧频(CCD外触发频率)、MCP增益等参数的设置,以及激光照明和成像视场的匹配。
门控选通型ICCD摄像机的像增强器阴极可进行高频率曝光,通过摄像机本身进行帧积分累加平均操作(多次曝光累积能量)或者专门设计的视频采集卡进行采集和帧叠加平均,同时根据水体的点扩散函数对图像进行反卷积变换去图像退化以降低图像噪声,提高图像质量,并输出标准模拟视频信号,然后通过水密电缆传输给主控计算机,主控计算机上的标准视频采集卡对视频信号进行采集,由计算机作进一步的处理,例如图像增强、存储和显示。同步控制装置是水下部分的控制中心,对以上所有部件进行集中控制,使之协调工作,它包括距离选通控制模块、调焦控制模块和激光主波采样模块。ICCD输出的视频信号通过水密同轴电缆传输至舱内控制台进行后续处理。
三、工作流程
水下激光距离选通成像系统可用于水下目标搜索成像,并适合于观察水下运动目标,由于成像原理的限制,选通区域的宽度很窄,系统在某一时刻只能观察到一薄层海水中的目标,并且该薄层离系统的距离由摄像机快门延迟时间决定,为了能探测到较大距离范围内的目标,还必须用软件的方法来连续调整系统的某些参数,如选通延迟时间、照明和摄像机视场等,确保能由近及远地搜索到目标,基于此,可将系统的工作模式简单地分为两种:定距观测模式及搜索模式。定距观测时,选通延迟时间事先设定不再更改,系统固定探测某一薄层海水中的目标。系统工作在搜索模式时,选通延迟时间由同步控制装置进行连续调整,由近及远地搜索目标,搜索模式的工作流程图如图4所示。

图4 水下激光距离选通成像系统工作流程框图
四、实验研究
实验在实验室水池中进行,水池如图5所示,实验样机和实验目标吊挂固定于水中一定深度,实验目标如图6所示,采用间隔距离相等、粗细不同的若干白色塑料圆管构成,白色圆管中心间隔距离约8cm。


图5 试验水池 图6 试验目标
实验时实验样机固定不动,实验目标可前后移动以考察不同距离处距离选通水下激光成像系统成像效果。实验过程中测得当时实验条件下水池中光波的衰减长度约7m。
从图7、图8可以看出:在距离10处,距离选通成像具有干净的背景,成像清晰,而被动成像则混入了较多的噪声,成像质量差。


图7 距离选通10m下图像 图8 常规成像10m水下图像
图9中目标下部较暗,是因为激光束主要照明视场中心,且发散角未设置太大造成的,通过调节照明视场与成像视场的大小可以使整个成像视场内照度均匀。
在15m处,常规成像时已很难分辨目标,达到了成像极限,而距离选通图像还十分清晰,轮廓分明,如图9、图10所示。


图9 距离选通15m水下图像 图10 常规成像15水下图像
在15m之外,常规成像不能捕获到目标,距离选通成像则可以继续获得质量较好的图像,如图11、图12所示。30m处图像比25m处亮度更高是由于此处加大了MCP电压,提高了ICCD的增益。


图11 距离选通25m水下图像 图12 距离选通30m水下图像
如图13、图14所示,直至35m处距离选通水下激光成像系统仍可以分辨目标,40m处可探测到目标,但至45m处只有一些稍亮的噪声点,不能探测到目标。


图13 距离选通35m水下图像 图14 距离选通40m水下图像
五、结论
设计了一套距离选通水下激光成像系统,阐述了其系统组成、功能模块及工作流程,最后进行了实验室条件下的水下成像实验,并与常规自然光被动成像效果进行对比。实验结果显示系统成像距离达40m,约6倍衰减长度。
利用距离选通技术有效抑制了光波在水中传输时较大的后向散射,获得了较自然光成像对比度增加、细节分辨能力增强的图像信息。

1
END
1
【作者简介】文/吕文磊 张旭 刘可,均来自中国人民解放军91550部队43分队;第一作者吕文磊,男,1982年出生,博士,主要从事水下测量与水下成像研究;本文为基金项目,国家自然科学基金项目(61701504);文章来自《兵器装备工程学报》(2019年第8期),参考文献略,用于学习与交流,版权归作者及出版社共同拥有,转载也请备注由“溪流之海洋人生”微信公众平台编辑整理。



相关阅读推荐
科技前沿▏水下光学图像中目标探测关键技术研究综述海洋技术▏三维激光技术在水下大坝与门槽结构精密检测中的应用海洋技术▏激光声纳探测技术研究海洋论坛▏水下三维激光扫描系统在水下结构物检测中的应用海洋技术▏三维全景成像声呐系统在水下细部结构检测中的应用科技前沿▏基于立体视觉的水下三维测量系统研究




公众号
溪流之海洋人生
微信号▏xiliu92899

用专业精神创造价值
用人文关怀引发共鸣
您的关注就是我们前行的动力
投稿邮箱▏12163440@qq.com

