神经网络收敛是什么意思,算法的收敛速度的计算
1、bp神经网络收敛问题
当然是越慢。因为已经接近最低点,训练也进入误差曲面的平坦区,每次搜索的误差下降速度是减慢的。这一点可以在BP神经网络的误差调整公式上看出。
事实上收敛速度逐渐减慢,这是正常的,如果一定要避免这种情况,可以自适应改变学习率。
由于传统BP算法的学习速率是固定的,因此网络的收敛速度慢,需要较长的训练时间。对于一些复杂问题,BP算法需要的训练时间可能非常长,这主要是由于学习速率太小造成的,可采用变化的学习速率或自适应的学习速率加以改进。
BP算法可以使权值收敛到某个值,但并不保证其为误差平面的全局最小值,这是因为采用梯度下降法可能产生一个局部最小值。对于这个问题,可以采用附加动量法来解决。
谷歌人工智能写作项目:小发猫

2、怎样可以提高神经网络的收敛速度
改变一下训练函数用trainscg,trainlm要比traingdx快,再就是优化初始权阈值,这方面方法就多了,网上这方面东西比较多,搜下看吧!祝你成功怎么计算神经网络的收敛速度。
3、怎么看出SVM比BP神经网络收敛速度快
单纯比较收敛速度并没有意义,因为两种方法的原理完全不同。但从得到全局最优解的角度来看,SVM效果较好。
一、SVM可以发现全局最优,而BP算法通常只能获得局部最优
SVM学习问题可以表示为凸优化问题,因此可以利用已知的有效算法发现目标函数的全局最小值。而其他分类方法(如基于规则的分类器和BP人工神经网络)都采用一种基于贪心学习的策略来搜索假设空间,这种方法一般只能获得局部最优解。
二、SVM方法避免了“维数灾难”
SVM方法巧妙地解决了维数灾难难题:应用核函数的展开定理,就不需要知道非线性映射的显式表达式;由于是在高维特征空间中建立线性学习机,所以与线性模型相比,不但几乎不增加计算的复杂性,而且在某种程度上避免了“维数灾难”.这一切要归功于核函数的展开和计算理论。
4、人工神经网络评价法
人工神经元是人工神经网络的基本处理单元,而人工智能的一个重要组成部分又是人工神经网络。人工神经网络是模拟生物神经元系统的数学模型,接受信息主要是通过神经元来进行的。首先,人工神经元利用连接强度将产生的信号扩大;然后,接收到所有与之相连的神经元输出的加权累积;最后,将神经元与加权总和一一比较,当比阈值大时,则激活人工神经元,信号被输送至与它连接的上一层的神经元,反之则不行。
人工神经网络的一个重要模型就是反向传播模型(Back-Propagation Model)(简称BP模型)。对于一个拥有n个输入节点、m个输出节点的反向传播网络,可将输入到输出的关系看作n维空间到m维空间的映射。由于网络中含有大量非线性节点,所以可具有高度非线性。
(一)神经网络评价法的步骤
利用神经网络对复垦潜力进行评价的目的就是对某个指标的输入产生一个预期的评价结果,在此过程中需要对网络的连接弧权值进行不断的调整。
(1)初始化所有连接弧的权值。为了保证网络不会出现饱和及反常的情况,一般将其设置为较小的随机数。
(2)在网络中输入一组训练数据,并对网络的输出值进行计算。
(3)对期望值与输出值之间的偏差进行计算,再从输出层逆向计算到第一隐含层,调整各条弧的权值,使其往减少该偏差的方向发展。
(4)重复以上几个步骤,对训练集中的各组训练数据反复计算,直至二者的偏差达到能够被认可的程度为止。
(二)人工神经网络模型的建立
(1)确定输入层个数。根据评价对象的实际情况,输入层的个数就是所选择的评价指标数。
(2)确定隐含层数。通常最为理想的神经网络只具有一个隐含层,输入的信号能够被隐含节点分离,然后组合成新的向量,其运算快速,可让复杂的事物简单化,减少不必要的麻烦。
(3)确定隐含层节点数。按照经验公式:
灾害损毁土地复垦
式中:j——隐含层的个数;
n——输入层的个数;
m——输出层的个数。
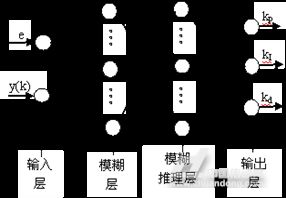
人工神经网络模型结构如图5-2。
图5-2人工神经网络结构图(据周丽晖,2004)
(三)人工神经网络的计算
输入被评价对象的指标信息(X1,X2,X3,…,Xn),计算实际输出值Yj。
灾害损毁土地复垦
比较已知输出与计算输出,修改K层节点的权值和阈值。
灾害损毁土地复垦
式中:wij——K-1层结点j的连接权值和阈值;
η——系数(0<η<1);
Xi——结点i的输出。
输出结果:
Cj=yj(1-yj)(dj-yj) (5-21)
式中:yj——结点j的实际输出值;
dj——结点j的期望输出值。因为无法对隐含结点的输出进行比较,可推算出:
灾害损毁土地复垦
式中:Xj——结点j的实际输出值。
它是一个轮番代替的过程,每次的迭代都将W值调整,这样经过反复更替,直到计算输出值与期望输出值的偏差在允许值范围内才能停止。
利用人工神经网络法对复垦潜力进行评价,实际上就是将土地复垦影响评价因子与复垦潜力之间的映射关系建立起来。只要选择的网络结构合适,利用人工神经网络函数的逼近性,就能无限接近上述映射关系,所以采用人工神经网络法进行灾毁土地复垦潜力评价是适宜的。
(四)人工神经网络方法的优缺点
人工神经网络方法与其他方法相比具有如下优点:
(1)它是利用最优训练原则进行重复计算,不停地调试神经网络结构,直至得到一个相对稳定的结果。所以,采取此方法进行复垦潜力评价可以消除很多人为主观因素,保证了复垦潜力评价结果的真实性和客观性。
(2)得到的评价结果误差相对较小,通过反复迭代减少系统误差,可满足任何精度要求。
(3)动态性好,通过增加参比样本的数量和随着时间不断推移,能够实现动态追踪比较和更深层次的学习。
(4)它以非线性函数为基础,与复杂的非线性动态经济系统更贴近,能够更加真实、更为准确地反映出灾毁土地复垦潜力,比传统评价方法更适用。
但是人工神经网络也存在一定的不足:
(1)人工神经网络算法是采取最优化算法,通过迭代计算对连接各神经元之间的权值不断地调整,直到达到全局最优化。但误差曲面相当复杂,在计算过程中一不小心就会使神经网络陷入局部最小点。
(2)误差通过输出层逆向传播,隐含层越多,逆向传播偏差在接近输入层时就越不准确,评价效率在一定程度上也受到影响,收敛速度不及时的情况就容易出现,从而造成个别区域的复垦潜力评价结果出现偏离。
5、 人工神经网络分类方法
从20世纪80年代末期,人工神经网络方法开始应用于遥感图像的自动分类。目前,在遥感图像的自动分类方面,应用和研究比较多的人工神经网络方法主要有以下几种:
(1)BP(Back Propagation)神经网络,这是一种应用较广泛的前馈式网络,属于有监督分类算法,它将先验知识融于网络学习之中,加以最大限度地利用,适应性好,在类别数少的情况下能够得到相当高的精度,但是其网络的学习主要采用误差修正算法,识别对象种类多时,随着网络规模的扩大,需要的计算过程较长,收敛缓慢而不稳定,且识别精度难以达到要求。
(2)Hopfield神经网络。属于反馈式网络。主要采用Hebb规则进行学习,一般情况下计算的收敛速度较快。这种网络是美国物理学家J.J.Hopfield于1982年首先提出的,它主要用于模拟生物神经网络的记忆机理。Hopfield神经网络状态的演变过程是一个非线性动力学系统,可以用一组非线性差分方程来描述。系统的稳定性可用所谓的“能量函数”进行分析,在满足一定条件下,某种“能量函数”的能量在网络运行过程中不断地减少,最后趋于稳定的平衡状态。Hopfield网络的演变过程是一种计算联想记忆或求解优化问题的过程。
(3)Kohonen网络。这是一种由芬兰赫尔辛基大学神经网络专家Kohonen(1981)提出的自组织神经网络,其采用了无导师信息的学习算法,这种学习算法仅根据输入数据的属性而调整权值,进而完成向环境学习、自动分类和聚类等任务。其最大的优点是最终的各个相邻聚类之间是有相似关系的,即使识别时把样本映射到了一个错误的节点,它也倾向于被识别成同一个因素或者一个相近的因素,这就十分接近人的识别特性。
6、BP神经网络在线学习的误差计算方法
标准BP算法中,每输入一个样本,都要回传误差并调整权值,这种对每个样本轮训的方法称为“单样本训练”。由于单样本训练遵循的是只顾眼前的“本位主义”原则,只针对每个样本产生的误差进行调整,难免顾此失彼,使训练次数增加,导致收敛速度过慢。因此,有另外一种方法,就是在所有样本输入之后,计算网络的总误差,再根据总误差调整权值,这种累积误差的批处理方式称为“批训练”或“周期训练”。在样本数较多时,批训练比单样本训练的收敛速度更快。
7、神经网络能否较快收敛
最主要的是隐含层的个数,我的经验是设定不一样的层数,看训练图参数自然就可以看出速度的快慢,当然是在保证精度的情况下,看训练图中的目标指数,如果大幅降低了精度,这是得不偿失的