2.深度学习模型使用:(卷积层,池化层,全连接层)
文章目录
- 前言
- 一、卷积层
- 二、池化层
- 三、线性层(全连接层)
-
- 3.1全连接
- 3.2激活函数
-
- 1.sigmoid
- 2.tanh
- 3.Relu
- 3.3Drop层
- 3.4Bath_Normal层
前言
网络模型在算法中比较常用,对于大部分的网络结构模型都包含以下各层,本文主要是来介绍各层的特点以及使用,对于结合实际的需求搭建模型,可以参考我的其他博客。
一、卷积层
卷积就是使用输入矩阵与卷积核进行卷积运算,通过卷积计算后的结果就是目标的特征信息。计算如下:
在上述5 * 5的输入矩阵与3 * 3的kernel进行卷积运算,得到的是3 * 3的目标矩阵。
可以明显的知道输出矩阵
w = img.shape[0]-kernel.shape[0]+1。
h = img.shape[1]-kernel.shape[1]+1。
矩阵的特征信息减少了,如果要维持5 * 5的维度,需要设置一个padding=1,进行0扩充。

pytorch给定的卷积输入形状与输出形状关系如下:
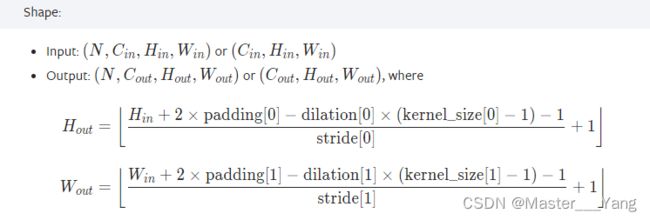 根据上述公式,对于一个卷积核大小为k,如果要保持输入输出的维度不变,需要设置paddi值为:k // 2。
根据上述公式,对于一个卷积核大小为k,如果要保持输入输出的维度不变,需要设置paddi值为:k // 2。
pytorch中给出的卷积层函数包含的参数较多,因为大部分都有默认值,这里只举出常用的一些:nn.Conv2d(in_channels, out_channels, kernel_size stride, padding)
in_channels:输入的维度
out_channels:输出的维度
kernel_size:卷积核大小
stride:卷积核每步移动的距离,默认是1
padding:边缘填充,默认是0
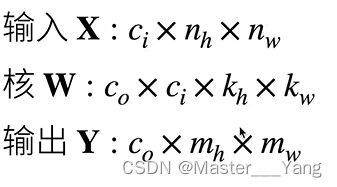
在卷积层中使用多通道输入,单通道输出如下所示:
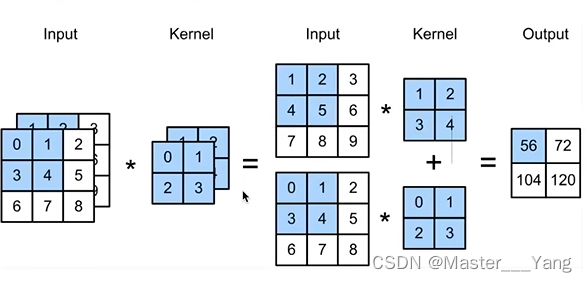
对于多通道输出,图像的输出输出特征信息如下所示:
二、池化层
池化层是降低数据特征的维度,在一定程度上防止数据的过拟合,同时缓解卷积层对于位置的敏感性。在这层中通常使用较多的是MaxPool2d和AvgPool2d,区别在于使用卷积核进行运算时,是采取最大值还是平均值。以MaxPool2d为例,在下述矩阵中采用大小为二的卷积核,输出如下。若采用平均池化层,则是对每一个卷积核内的内容取平均值。

上述卷积核移动的步长是默认值None,因此输出矩阵大小均缩小一半。
nn.MaxPool2d(kernel_size=3)
pytorch中给定的池化层函数中,卷积核尺寸是没有默认值的,其余的均用。
- stride:卷积核移动的步长,默认为None(即卷积核大小)
- padding:输入矩阵进行填充,默认为0
- ceil_mode: 是否过滤掉那些不满足卷积核大小的区域,默认为False
- dilation:卷积核膨胀尺寸,默认值为1
卷积核计算公式为:
膨胀的卷积核尺寸 = 膨胀系数 * (原始卷积核尺寸 - 1) + 1
举如下例子:卷积核大小为3,stride大小为3,ceil_mode为True,图解如下:

model = nn.MaxPool2d(kernel_size=3,stride=None,ceil_mode=True)
input = torch.Tensor([[[5, 1, 2, 5],
[3, 2, 1, 8],
[2, 6, 1, 1],
[6, 1, 4, 7]]])
output = model(input)
print(output)
输出:
tensor([[[6., 8.],
[6., 7.]]])
三、线性层(全连接层)
3.1全连接
全连接层基本上用来作为模型的最后一层,是将每个神经元与所用前后的神经元进行连接,得到图像的特征信息输出。如下图所示,判断一张图片是否是猫,建立了2层全连接层计算,得到猫的特征信息输出。在建立全连接层时,有时会出现过拟合现象,因此常常会使用Drop来减低数据的拟合度。

pytorch中给出了几个全连接计算函数,在通常使用多的是线性转化:

torch.nn.Linear(in_features, out_features, bias=True, device=None, dtype=None)
- in_features: 输入维度。 out_features: 输出维度
3.2激活函数
在卷积网络中,不使用激活函数,模型就是输入的线性组合,无论添加多少层模型,结果无非还是矩阵相乘,那么网络的逼近能力就相当有限。正因为上面的原因,我们决定引入非线性函数作为激励函数,这样深层神经网络表达能力就更加强大。
常用的非线性激活函数有:sigmoid、tanh、relu函数。这个部分主要介绍一下主要的激活函数的特征。
在介绍之前先提两个重要的概念梯度消失、梯度爆炸:
梯度消失:
指的是导函数的图像过于平直,求导后的值越来越接近于0,根据梯度更新公式 可以知道,参数的下降速度是非常慢的,从而导致收敛速度慢,训练时间无限延长。
可以知道,参数的下降速度是非常慢的,从而导致收敛速度慢,训练时间无限延长。
梯度爆炸:
梯度爆炸就是由于初始化权值过大,前面层会比后面层变化的更快,就会导致权值越来越大,梯度爆炸的现象就发生了。在深层网络或循环神经网络中,误差梯度可在更新中累积,变成非常大的梯度,然后导致网络权重的大幅更新,并因此使网络变得不稳定。在极端情况下,权重的值变得非常大,以至于溢出,导致 NaN 值。
网络层之间的梯度(值大于 1.0)重复相乘导致的指数级增长会产生梯度爆炸。
1.sigmoid
sigmoid

显然其导数dy=y*(1-y)。函数的图像如下所示:

特点
它能够把输入的连续实值变换为0和1之间的输出,特别的,如果是非常大的负数,那么输出就是0;如果是非常大的正数,输出就是1.
缺点
- 输出值不以零为中心。
- 深度神经网络中梯度反向传递时导致梯度爆炸和梯度消失,其中梯度爆炸发生的概率非常小,而梯度消失发生的概率比较大。
- 其解析式中含有幂运算,计算机求解时相对来讲比较耗时。对于规模比较大的深度网络,这会较大地增加训练时间。
2.tanh

导数dy = 1-tanh(x)*tanh(x) ,函数图像为:

特点:
解决了sigmoid函数输出不关于0点对称,根据导函数可知,导函数易求,图像平滑。
缺点:
和sigmoid函数一样,导函数小于1易发生梯度消失,同时函数包含指数运算,时间花费较大。
3.Relu
relu函数是现在神经网络通常使用的一个激活函数,表达式为f(x)=max(0,x)。因为导数形式比较简单就不做图像描绘
特点:
计算简单,没有指数运算等,解决了梯度消失的问题(在正区间内),参数的收敛速度也很快。
缺点:
- 和sigmoid函数一样,没有解决zero-centered问题。
- Dead ReLU Problem,指的是某些神经元可能永远不会被激活,导致相应的参数永远不能被更新。有两个主要原因可能导致这种情况产生: (1) 非常不幸的参数初始化,这种情况比较少见 (2) learning rate太高导致在训练过程中参数更新太大,不幸使网络进入这种状态。解决方法是可以采用Xavier初始化方法,以及避免将learning rate设置太大或使用adagrad等自动调节learning rate的算法。
3.3Drop层
Dropout通常使用在全连接层,一般来说,我们在可能发生过拟合的情况下才会使用dropout等正则化技术。那什么时候可能会发生呢?比如神经网络过深,或训练时间过长,或没有足够多的数据时。那为什么dropout能有效防止过拟合呢?可以理解为,我们每次训练迭代时,随机选择一批单元不参与训练,这使得每个单元不会依赖于特定的前缀单元,因此具有一定的独立性;同样可以看成我们拿同样的数据在训练不同的网络,每个网络都有可能过拟合,但迭代多次后,这种过拟合会被抵消掉。

在现在的神经网络模型下,Dropout使用的也越来越少,也逐渐被(Batch Normal)所取代,因为Dropout主要作用于FC层,而很多检测模型不使用FC,其次其正则化的能力有限,在过多的忽略神经元,会导致模型的收敛步长加大, 而且模型的准确性降低。
对于BN和Dropout比较可以参考以下博客:
https://blog.csdn.net/m0_37870649/article/details/82025238
3.4Bath_Normal层
BN是将数据进行归一化处理(均值为0,方差为1),如果不做归一化,使用mini-batch梯度下降法训练的时候,每批训练数据的分布不相同,那么网络就要在每次迭代的时候去适应不同的分布,这样会大大降低网络的训练速度。
根据论文中,BN是做了一下这些步骤(xi是输入,yi是输出):

Pytorch中的BN操作为:
nn.BatchNorm2d(num_features, eps=1e-5, momentum=0.1, affine=True, track_running_stats=True)
- num_features,输入数据的通道数,归一化时需要的均值和方差是在每个通道中计算的
- eps,用来防止归一化时除以0
- momentum,滑动平均的参数,用来计算running_mean和running_var
- affine,是否进行仿射变换,即缩放操作
- track_running_stats,是否记录训练阶段的均值和方差,即running_mean和running_var