强化学习-第二章-马尔可夫决策过程
蘑菇书 :https://linklearner.com/datawhale-homepage/#/learn/detail/91
马尔克夫性质
所有马尔可夫过程 都 满足 :
状态转移:一个状态的下一个状态只取决于它当前状态,而跟它当前状态之前的状态都没有关系。
因此:从当前状态 s_t 转移到 s_t+1 这个下一状态,直接就等于它之前所有的状态(h_t :包含起始到当前t时刻 的所有状态)转移到 s_t+1。
马尔可夫链(s、p)、马尔可夫价值(s,p,R)
给定 状态转移P(条件概率):从一个状态 可以到达 所有状态 的 概率,
从一个 状态 开始 ,对马尔科夫链 进行 采样 ,可以得到 很多条 轨迹 episodes 。
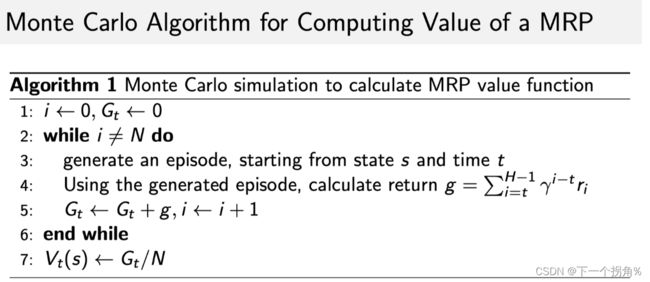
【通过大量 采样 依据大数定律 ,从 某一个状态 开始 ,采样生成很多轨迹,计算得到的 奖励 ,取平均值,作为进入 这一状态 可以得到的奖励 。->蒙特卡洛算法】
动态规划 【 反向传播(迭代),正向寻优 】
-》贝尔曼方程![]()
-》后继状态值的估计来更新状态值的估计
-》迭代更新 上一状态,因此当 最后更新状态 和 上一状态 变化 并不大 时, 更新 可以停止-》输出 最新 的value 值 作为它当前状态 -》自举

马尔可夫决策过程(s,p,R,decision(action))
多了 一个决策 过程,所以下一状态 由当前状态s 和 选取 动作a(决策选择 什么动作 a) 共同影响 。在MRP 的条件上 加一个 a 。
预测 prediction :
输入-- MDP
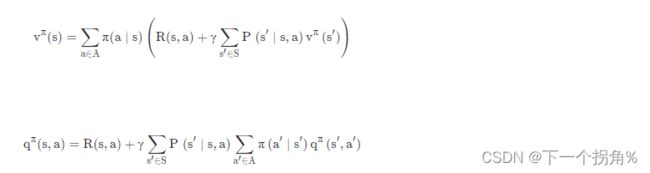
这里MDP 表示 value function 的时候 是用 action -value function (某一个状态采取某一个动作,得到 return 的一个期望 ):![]()
多了的策略 就是决策选择 何种动作 进入 下一状态s',所以会得到一个概率
![]()
这里 ,上面两式 相乘加和 ,就可以 去掉 a ,动作,这一个变量 因素,输出得到 value-function
![]()
这里 计算 value-function 的 过程就是 策略评估(或者 预测) ,评估(预测)这个策略 会给我们得到多大的奖励 。
【给定一个policy ,确定他的value function】
控制 control:
输入:MDP
输出:最佳价值函数(optimal value function) v∗ 和最佳策略(optimal policy) π∗。
【没有 policy 的前提下,我们要确定最优的 value function 以及对应的决策方案。 】
因此要去 寻找最佳策略
![]()
寻找的过程分为 两种 :策略迭代 、 值迭代
策略迭代
策略评估+策略改进:
(1)在初始化的时候,我们有一个初始化的 V 和 π ,给定当前的poilcy function (已经搜索过的)来估计v函数。 (2)根据 v 和 q 函数 的关系 ,推出 q函数 ,因为q函数 里面 包含这个 策略的变量 动作a ,然后 采用 贪心算法 ,把使得 q 最大 的 a 提取出来 得到 新的 策略 π'
Bellman expectation equation
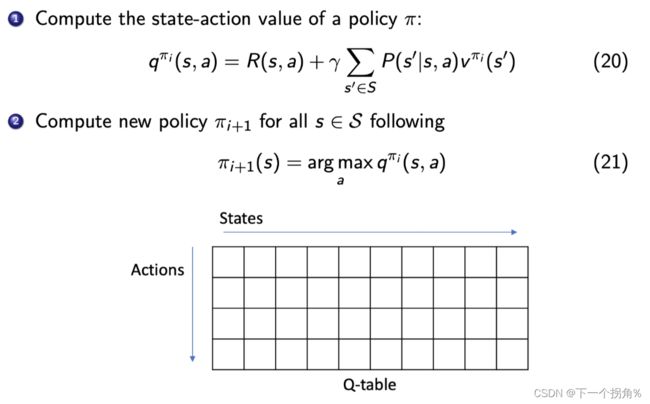
这里 Q 函数看成一个 Q-table。【是一个表格形式,所以Q-learning 表格型的 方法】
对于某一个状态,每一列里面我们会取最大的那个值,最大值对应的那个 action 就是它现在应该采取的 action。
所以 arg max 操作【贪心策略】就说在每个状态里面采取一个 action,这个 action 是能使这一列的 Q 最大化的那个动作。

值迭代
直接用 贝尔曼最优方程 去迭代 ,每一步都是最优的

只是在解决一个 planning 的问题,而不是强化学习的问题,因为我们知道环境如何变化。value function 做的工作类似于 value 的反向传播。