【Rt-Thread】STM32输出PWM
1 实验目标
STM32输出不同频率的占空比为50%的PWM信号,控制蜂鸣器音调
2 硬件部分
2.1 模块介绍
(1)主控芯片 F405RGT6
(2)蜂鸣器 低电平触发
2.2 接线方式
| STM32F405RGT6 | 蜂鸣器 | JLINK下载器 |
|---|---|---|
| 3.3V | VCC(或不接) | 3.3V |
| GND | GND | GND |
| PA11(输出PWM信号) | I/O(或蜂鸣器正极) | |
| PA14 | SWCK | |
| PA13 | SWIO |
3 软件部分
3.1 软件介绍
(1)Rt-Thread Studio

(2) STM32CubeMX

4 实验步骤
4.1 新建Rt-Thread工程
(1)依次选择文件-------新建----------RT-Thread 项目

(2)按要求选择自己的芯片型号,这里使用STM32F405RG,其余默认

(3)在applications下鼠标右键新建文件夹,命名为pwm_output,并选中文件夹鼠标右键新增pwm_output.c文件
(4) 在pwm_output.c文件中插入以下源码
/*
* Copyright (c) 2006-2020, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2020-11-12 BROSY the first version
*/
#include (5)打开CubeMX新建工程,配置TIM1 CH4 输出PWM,并配置输出工程属性,生成代码。



(6)打开stm32f4xx_hal_msp.c,复制下面几个函数
void HAL_TIM_PWM_MspInit(TIM_HandleTypeDef* htim_pwm)
void HAL_TIM_MspPostInit(TIM_HandleTypeDef* htim)
void HAL_TIM_PWM_MspDeInit(TIM_HandleTypeDef* htim_pwm)

打开Rt-Thread studio drivers文件夹下面的drv_pwm.c文件,将函数粘贴在extern下面

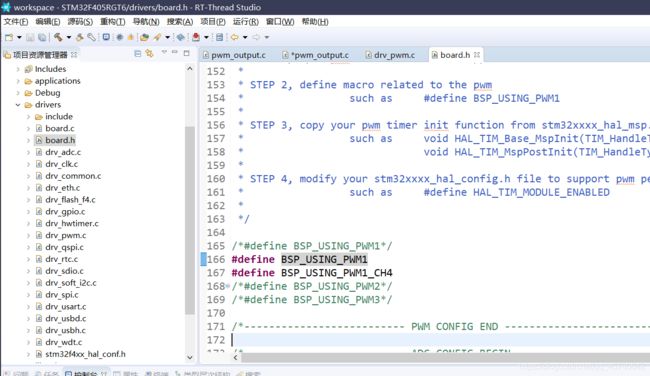
(7)在board.h中加入如下代码
#define BSP_USING_PWM1
#define BSP_USING_PWM1_CH4
(8)在pwm_config.h中加入如下代码
#ifdef BSP_USING_PWM1
#ifndef PWM1_CONFIG
#define PWM1_CONFIG \
{ \
.tim_handle.Instance = TIM1, \
.name = "pwm1", \
.channel = 0 \
}
#endif /* PWM1_CONFIG */
#endif /* BSP_USING_PWM1 */

(9)启用PWM设备驱动,勾选使用PWM设备驱动后ctrl+s保存


(10)打开stm32f4xx_hal_conf.h文件,取消HAL_TIM_MODULE_ENABLED注释

(11)连接开发板,先编译成功后下载

5 实验现象
蜂鸣器循环发出四种不同音调
6 总结
- 主要记录了Rt-Thread 中STM32 输出PWM配置过程
- 主要函数:
rt_pwm_set(pwm_dev, PWM_DEV_CHANNEL, period, pulse);
period控制信号周期(频率),周期单位为纳秒(ns)
pulse为每个周期输出高电平的时间,控制PWM占空比,大小为0~period