为MoveIt添加基于3D LiDAR的环境感知
文章目录
- 前言
- 1. 设置传感器属性参数
- 2. 更新launch文件
- 3. 运行验证
- 可能碰到的问题
- 总结
前言
MoveIt 的环境感知,可以通过接入 3D 的 LiDAR 或者深度相为机械臂构建基于“Octomap”的周围环境。MoveIt 通过“Occupancy Map Updater”插件处理 3D 数据进行环境感知。
官网有基础的教程链接,但内容细节描述得不够清晰,本文基于官网链接的过程,使用 Robosense 的 16 线 3D LiDAR 做完整实现的说明,同时澄清一些官网未提及的细节。
1. 设置传感器属性参数
moveit_config 在通过 Setup Assistant 创建时无论是否设置 3D sensor 都会自动创建 3D sensor 的参数文件,命名为“sensors_3d.yaml”。首先,需要将 3D sensor 的参数添加到该文件。以 Robosense 的 16 线 3D LiDAR 为示例,在文件“sensors_3d.yaml”中添加如下内容:
# The name of this file shouldn't be changed, or else the Setup Assistant won't detect it
sensors:
- sensor_plugin: occupancy_map_monitor/PointCloudOctomapUpdater
point_cloud_topic: rslidar_points
max_range: 5.0
point_subsample: 1
padding_offset: 0.1
padding_scale: 1.0
max_update_rate: 1.0
filtered_cloud_topic: filtered_cloud
#ns: Kinect
本文示意的是3D LiDAR的属性参数,深度相机的属性参数参考官网说明链接
需要重点关注的参数:
| 名称 | 说明 |
|---|---|
| point_cloud_topic | 指定 3D LiDAR 所发布类型为“sensor_msgs/PointCloud2”消息的主题,本文示例为 Robosense 的 16 线激光,其发布主题为“rslidar_points” |
| ns | 命名空间,当有多个 LiDAR 时可以通过其进行区分,由于只用到了一个 LiDAR,这里暂时注释 |
2. 更新launch文件
3D sensor 的属性参数是由 launch 文件调用进入 ROS param server的,因此,需要将 3D sensor 的属性参数文件更新到 launch 文件中。3D sensor 的属性参数文件“sensors_3d.yaml”在 moveit_config 中的 launch 调用关系为:

更新 launch 文件“sensor_manager.launch.xml”,为其加入如下内容:
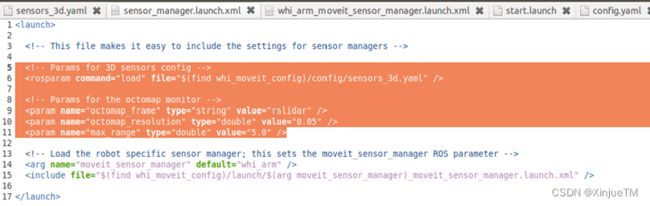
需要重点关注的参数:
| 名称 | 说明 |
|---|---|
| octomap_frame | 3D sensor 所发布消息的坐标系 id,可以通过 rostopic 查看 3D sensor 的消息确定 |
该参数可以通过查看其发布的消息来确定,以 Robosense 的 16 线激光雷达为例,首先将其运行,在终端输入命令:
roslaunch rslidar_sdk start.launch
随后,通过 rostopic 确定其发布消息的主题,在终端输入命令:
rostopic list

确定其发布消息主题为“/rslidar_points”,再次通过 rostopic 确定其坐标系 id,继续在终端输入命令:
rostopic echo /rslidar_points/header/frame_id

由此,可以得到其消息的坐标系 id 为“/rslidar”
3. 运行验证
随后,运行验证 3D sensor 信息是否能被 MoveIt 加载,首先运行 3D sensor,依然以 Robosense 的 16 线激光雷达为例,在终端输入命令:
roslaunch rslidar_sdk start.launch
随后运行 moveit_config 的 demo.launch,以苇航智能的 whi_moveit_config 为例,在新终端输入命令:
roslaunch whi_moveit_config demo.launch
本文示例以作者公司苇航智能的 moveit_config 为示例,读者可以使用 panda_moveit_config
遗憾的是,运行后不能看到类似官网链接中的 Octomap 环境:

可以分析 3D sensor 发布的点云信息带有坐标,这些坐标如何和机械臂所在坐标系进行关联,目前为止,我们还未提供这种关联关系。因此初步分析问题应该是由于 TF tree 不完整所导致。可以通过 rqt_graph 查看当前的 TF tree 留存与官网示例的 TF tree 进行对比进行分析问题所在,在新终端输入命令:
rosrun rqt_graph rqt_graph

随后,运行官网示例,在终端输入命令:
roslaunch moveit_tutorials obstacle_avoidance_demo.launch
运行成功后,在另一个终端输入命令:
rosrun rqt_graph rqt_graph

对比两个TF关系,可以看到我们缺失了“to_panda”到“move_group”与“to_camer”到“move_group”的两条静态 TF 的发布路径,通常静态发布路径都是由 launch 文件发布,因此查看官网示例的 launch 文件“obstable_avoidance_demo.lanch”,可以看到其有两个“static_transform_publisher”:

参照该文件将上述两条“static_transform_publisher”加入到 3D sensor 的运行 launch 文件中:
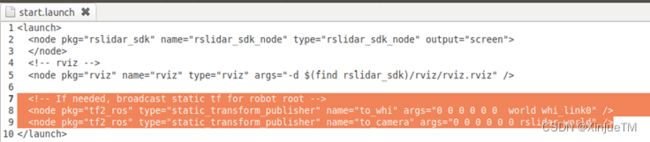
由于使用苇航智能的 moveit_config 和 Robosense 的 16 线 LiDAR,所以,第一个 TF transform,终点修改为了“whi_link0” - whi_config的固定 link 坐标系 id,第二个 TF transform 的起点修改为了“rslidar” - Robosense LiDAR 的坐标系 id
另一个需要关注的是,实际情况中需要依据 3D sensor 与机械臂的实际位置关系,修改 TF transform “to_camera”的坐标转换数值,本章节示例的是其间没有位置偏差,都是“0”
最后,再次运行查看,依然在两个终端分别输入命令,运行 3D sensor:
roslaunch rslidar_sdk start.launch
另一个终端运行moveit_config:
roslaunch whi_moveit_config demo.launch
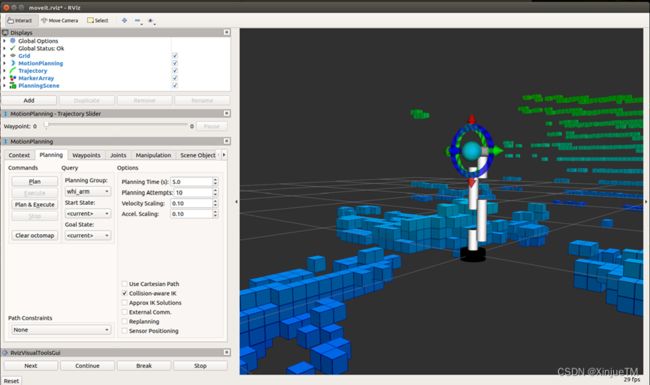
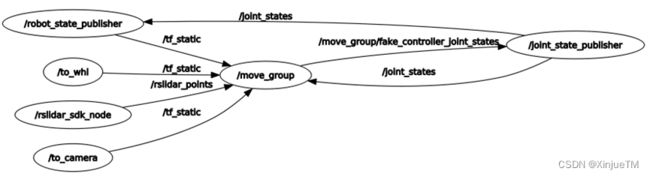
此时,能看到来自于 3D sensor 的环境信息,同时再次通过 rqt_graph 查看 TF tree,可以看到与官网的关系保持一致:
可能碰到的问题
运行时提示“Transform error of sensor data: Invalid argument “/rslidar” passed to lookupTransform argument source_frame in tf2 frame_ids can not start with a ‘/’ like: ;”:

提示已经很明显,frame_id 不能以字符‘/’开头,查看 Robosense LiDAR 的 config 文件“config.yaml”,其给出的 frame_id 为“/rslidar”,将字符‘/’删除后解决问题

总结
3D 环境感知对机械臂有很广泛的运用需求,本文通过实现官网教程的过程,澄清一些官网教程中未能说明的细节,希望通过本文说明能够有类似需求的读者提供一个参考。
如果文中出现了描述错误以及不清晰的地方,欢迎指正,共同交流:[email protected]