ROS中节点、话题、参数重命名以及全局、相对、私有命名空间(示例+代码)
ROS中的命名空间
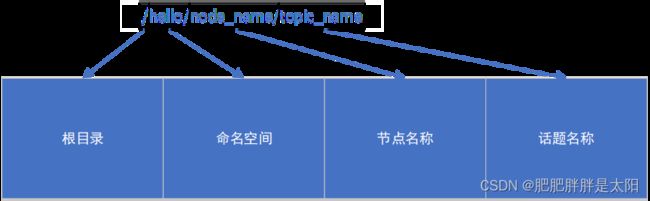
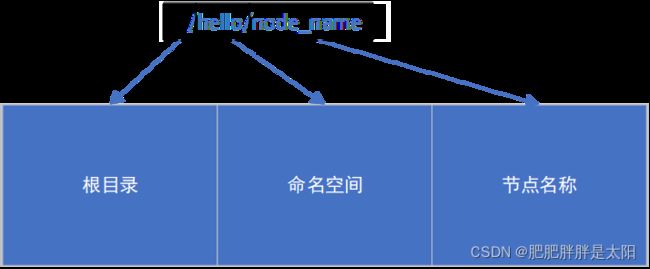
我们首先要了解一下路径的各个部分所代表的含义:
① 以话题为例,三级路径:
② 以节点为例,共有二级路径:
③ 以参数为例,共有三级路径:

ROS中的命名空间分为三种:全局、相对、私有。其实命名空间就是名称的前缀,前缀代表着所在路径,存放的位置可以相对于根目录、节点、节点句柄的命名空间这三者来进行划分:
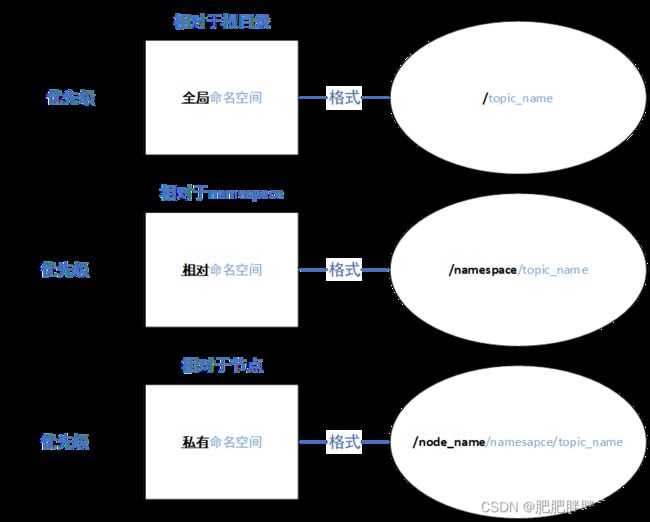
私有、全局、相对命名空间判断的依据:
| 私有命名空间 |
“/node_name”节点名称在最外侧 |
| 全局命名空间 |
仅有一个“/”根目录在最外侧 |
| 相对命名空间 |
“/namespace”节点句柄命名空间在最外侧 |
话题命名空间的设置
1. cpp源文件设置:
话题首先要在master中注册,所以注册话题信息的函数是节点句柄调用的,因此相对/私有命名空间的设置是靠节点句柄完成的。相对和私有命名空间的设置如下所示:
// 全局命名空间:topic=/chatter
ros::Publisher pub = nh.advertise("/chatter",10);
// 相对命名空间:topic=/namespace/chatter
ros::NodeHandle nh("dr");
ros::Publisher pub = nh.advertise("chatter",10);
// 相对命名空间:topic= /node_name/namespace/ chatter
ros::NodeHandle nh("~dr");
ros::Publisher pub = nh.advertise("chatter",10);
// 私有命名空间:topic=/node_name/chatter
ros::NodeHandle nh("~");
ros::Publisher pub = nh.advertise("chatter",10); 当我们的topic设置为”/chatter”(带有斜杠)且全局优先级最高,因此topic不会受到namspace和node_name的影响。
2. rosrun命令行设置:
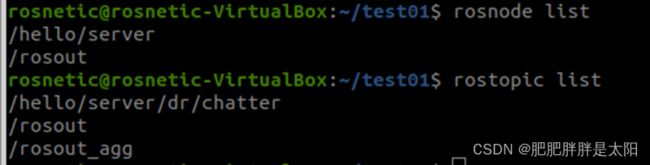
除此之外,还可以使用rosrun给该.cpp文件中所有的属性添加相对命名空间,具体形式为:rosrun package_name cpp_name __ns:="hello",运行结果如下所示:

在该节点所在文件中所有的话题、所有的上报参数、所有的节点名称都将加上/hello/的前缀。
注意:__ns:=”global_namespace”是双下划线。
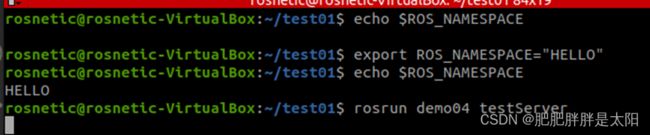
3. 修改工程的环境变量ROS_NAMESPACE(修改global_namespace)
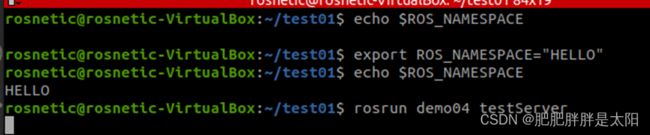
一开始ROS_NAMESPACE的内容为空,我们将ROS_NAMESPACE设置为HELLO之后,在运行以下cpp源文件,结果如下图所示:

话题的重命名
话题的重命名又名为“话题的映射(remapping)“,是为了防止如下情况发生而提出的:
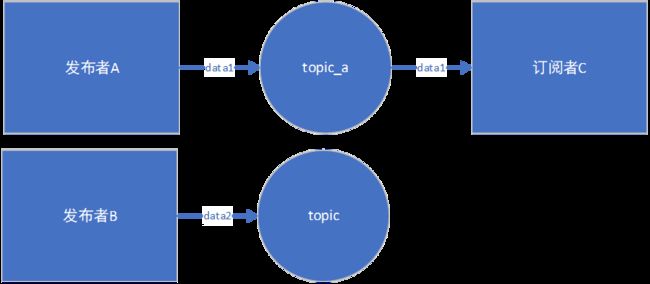
1. 情况一:
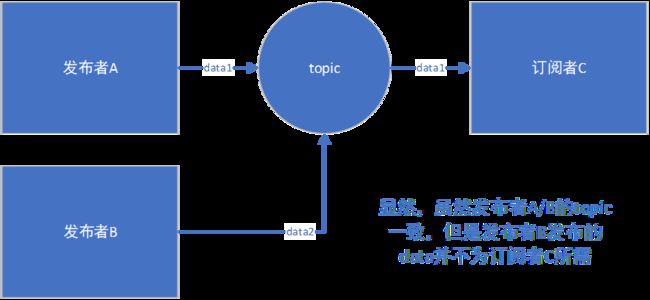
订阅者C需要的是发布者A的data1而非发布者B的data2,所以我们需要将发布者A/订阅者C之间的topic映射为topic_a,使得订阅者C又可以接收到发布者A的data1,同时不改变发布者B的topic:
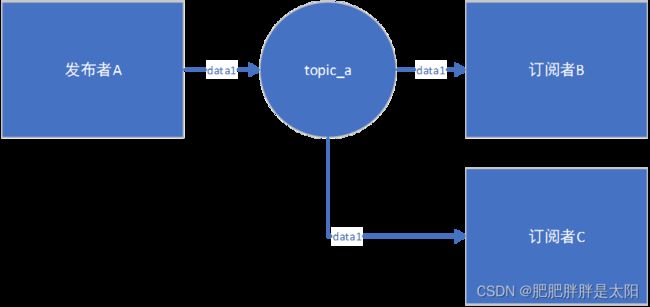
2. 情况二:
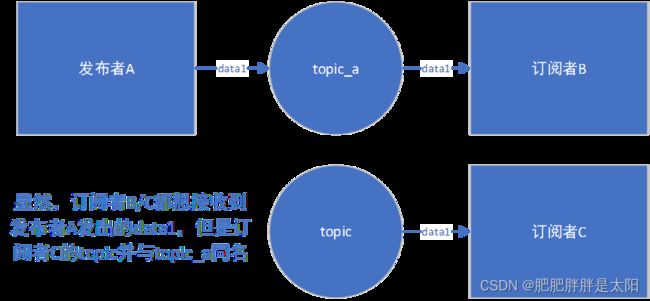
我们需要将topic映射为topic_a,使得发布者A与订阅者C可以通过同一topic完成连接:
话题的重映射可以通过以下两种操作完成:
① 在rosrun中更改topic名称
形式如下:rosrun package_name cpp_name topic_name:="topic_new_name",结果如下所示:
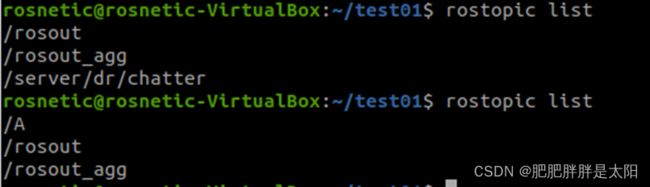
输入命令:rosrun demo04 testServer /server/dr/chatter:="A“
② 在launch文件中使用
Launch文件编写格式详见:ROS中文件组织形式:launch文件+元功能包(示例+代码+参数解析)_超级霸霸强的博客-CSDN博客 https://blog.csdn.net/weixin_45590473/article/details/122647788
https://blog.csdn.net/weixin_45590473/article/details/122647788
节点命名空间的设置
① 使用launch文件中
结果如下所示:

如果使用ns子标签得出的路径为相对命名空间,如若没有使用ns子标签得出的路径为全局命名空间。
② rosrun命令
具体形式:rosrun package_name cpp_name __ns:="hello",运行结果如下所示:
在该节点所在文件中所有的话题、所有的上报参数、所有的节点名称都将加上/hello/的前缀。
注意:__ns:=”global_namespace”是双下划线,这里得出的路径为相对命名空间。
③ 使用cpp源文件设置
注意:节点的命名空间一共有两层,分别为“相对”和“全局”。
④ 修改工程的环境变量ROS_NAMESPACE(修改global_namespace)
一开始ROS_NAMESPACE的内容为空,我们将ROS_NAMESPACE设置为HELLO之后,在运行以下cpp源文件,结果如下图所示:

节点重命名
① 使用launch文件进行节点名称重映射
结果如下所示:

注意:
② 使用rosrun进行修改:
命令格式:rosrun package_name cpp_name node_name:="node_new_name",运行结果如下所示:

命令为:rosrun demo04 testServer /server:="node_B",有结果可以得知“这个操作才是节点名称重命名”。如果我们还觉得太麻烦(以上命令必须得知道节点名称才OK),那我们也可以使用如下命令格式:rosrun package_name cpp_name __name:="node_new_name"
注意:这里也是双下划线!
参数命名空间设置
参数的上报一共有三种方式:命令行、源文件、launch文件。
① rosrun后追加额外参数
格式:rosrun package_name cpp_name _param:=value
其中,参数名前一定要加_一个下划线,我们类比上报参数、话题改名、节点改名、添加命名空间四种不同的操作所对应的rosrun后追加参数的形式:
// 给所有参数添加相对命名空间
rosrun package_name cpp_name __ns:="hello"
// 更改话题名称
rosrun package_name cpp_name topic_name:="topic_new_name"
// 更改节点名称(两种形式)
rosrun package_name cpp_name node_name:="node_new_name"
rosrun package_name cpp_name __name:="node_new_name"
// 上报参数
rosrun package_name cpp_name _ParamName:=value 我们使用rosrun命令向参数服务器添加参数,这个参数其实是属于该节点的私有参数:
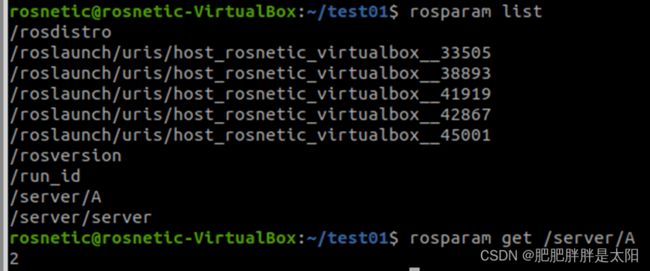
命令:rosrun demo04 testServer _A:=2
我们从结果中可以看出:参数A有前缀,前缀为节点名称server,因此我们通过rosrun上报给参数服务器的参数的命名空间为私有类型的。
② 源文件
通过源文件向参数服务器上报参数分为以下两种方案:
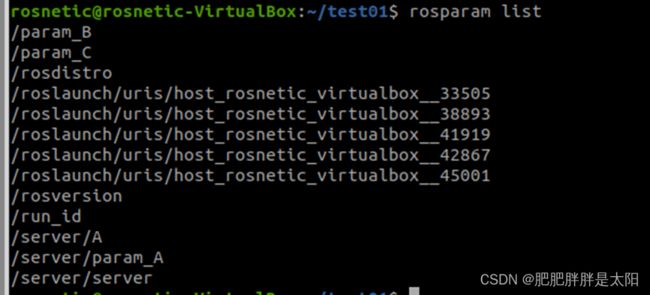
1. ros命名空间下的param函数
// 私有命名空间:/node_name/param_A
ros::param::set("~param_A","A");
// 全局命名空间:/param_B
ros::param::set("/param_B","B");
// 相对命名空间:/param_C
ros::param::set("param_C","C"); 运行结果如下所示:
相对命名空间是相对于global_namespace来说的,我们前面提到过:可以使用rosrun命令行的方式设置global_namespace:

命令:rosrun demo04 testServer __ns:="hello",我们看到全局命名空间就是/param_name,无论你设置什么都不会改变,改变的只是私有/相对命名空间。
2. 节点句柄的setparam成员函数
由于setparam是NodeHandle的成员函数,因此我们只需要改变NodeHandle所在的命名空间即可以使得参数发生同样的变化。
//私有命名空间:/node_name/Param_D
ros::NodeHandle nh("~");
nh.setParam("Param_D","D");
//相对命名空间:/namespace/Param_E
ros::NodeHandle nh1("dr");
nh1.setParam("Param_E","E");
//私有命名空间:/node_name/namespace/Param_F
ros::NodeHandle nh2("~dr");
nh2.setParam("Param_F","F");
//全局命名空间:/Param_G
ros::NodeHandle nh3;
nh3.setParam("Param_G","G"); 运行结果如下所示:
/server/Param_D
/dr/Param_E
/server/dr/Param_F
/Param_G 3. 使用launch文件设置参数
4. 修改工程的环境变量ROS_NAMESPACE(修改global_namespace)
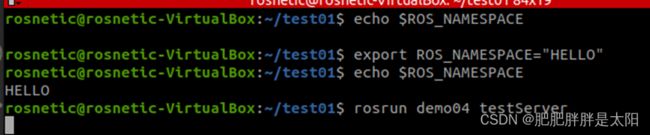
一开始ROS_NAMESPACE的内容为空,我们将ROS_NAMESPACE设置为HELLO之后,在运行以下cpp源文件,结果如下图所示:

如果你想去掉这个global_namespace,那么你可以用赋值的方式去掉:

我们看到赋完空值后,ROS_NAMESPACE的值为空。