Error-yolov5 pt转onnx报错
-
ValueError: Unable to permute shape [1, 3, 80, 80, 2] to NSC ordering 2021-11-24 16:37:00,542 - 194 - ERROR - Node Mul_259: Unable to permute shape [1, 3, 80, 80, 2] to NSC ordering
-
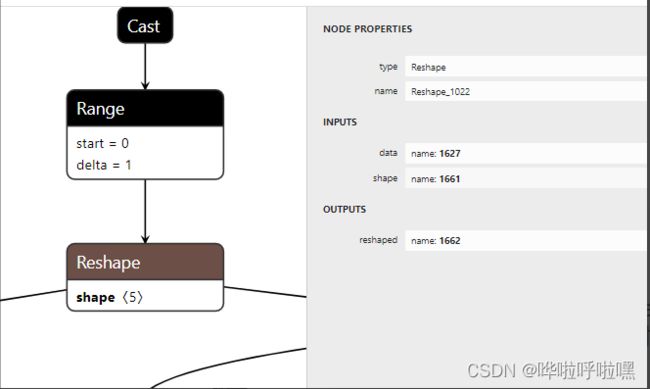
ERROR - Node Expand_487: Dynamic value for tensor name: 1030,is not supported
-
Encountered Error: "Converter does not support 'expand' op type"
出现如上错误,主要出现在的代码段是:
x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
class Expand(nn.Module):
…x = x.view(N, s, s, C // s ** 2, H, W)
x = x.permute(0, 3, 4, 1, 5, 2).contiguous() …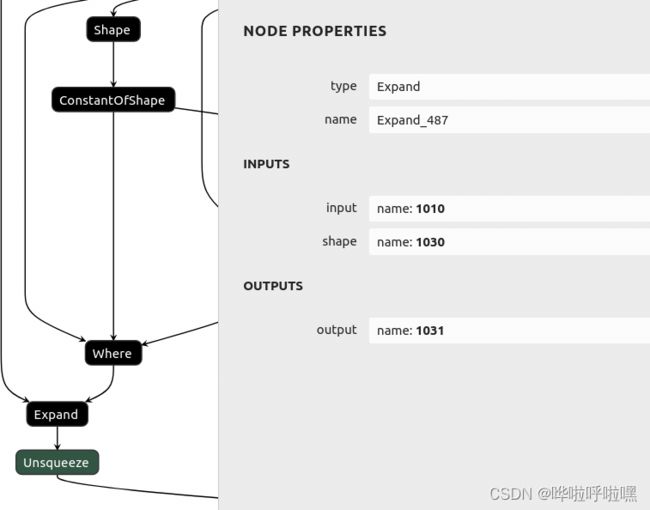
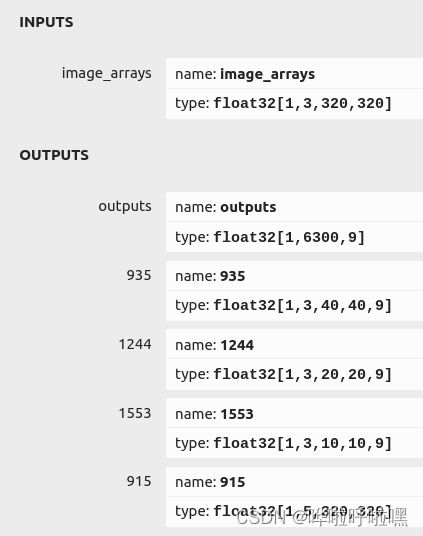
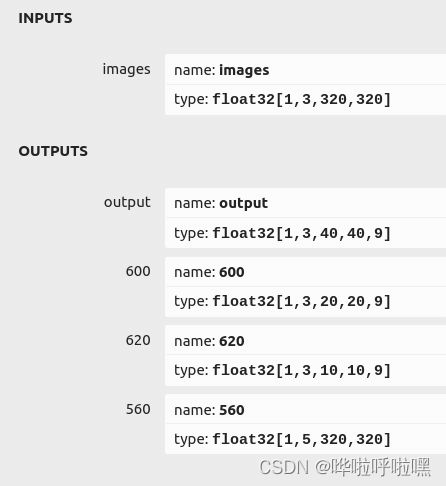
修改: 去掉Detect层,改为转换后的处理,对三个输出层处理(export grid=True)
python models/export.py --weights runs/train/qr_data_channel3/weights/best.pt --img 320 --batch 1转换后的onnx的输出少了直接通过detect层输出的[1,6300,9] :
![]()
对输出的onnx进行detect层输出并预测(参考链接:基于onnxruntime的YOLOv5单张图片检测实现_wxplol的博客-CSDN博客_onnx yolov5):
# coding=utf-8
import os
os.environ['CUDA_VISIBLE_DEVICES'] = '-1'
import cv2.cv2 as cv2
import numpy as np
import onnxruntime
import torch
import torchvision
import time
import random
import argparse
class YOLOV5_ONNX(object):
def __init__(self,onnx_path):
'''初始化onnx'''
self.onnx_session=onnxruntime.InferenceSession(onnx_path)
self.input_name=self.get_input_name()
self.output_name=self.get_output_name()
def get_input_name(self):
'''获取输入节点名称'''
input_name=[]
for node in self.onnx_session.get_inputs():
input_name.append(node.name)
return input_name
def get_output_name(self):
'''获取输出节点名称'''
output_name=[]
for node in self.onnx_session.get_outputs():
output_name.append(node.name)
return output_name
def get_input_feed(self,image_tensor):
'''获取输入tensor'''
input_feed={}
for name in self.input_name:
input_feed[name]=image_tensor
return input_feed
def letterbox(self,img, new_shape=(640, 640), color=(114, 114, 114), auto=False, scaleFill=False, scaleup=True,
stride=32):
'''图片归一化'''
# Resize and pad image while meeting stride-multiple constraints
shape = img.shape[:2] # current shape [height, width]
if isinstance(new_shape, int):
new_shape = (new_shape, new_shape)
# Scale ratio (new / old)
r = min(new_shape[0] / shape[0], new_shape[1] / shape[1])
if not scaleup: # only scale down, do not scale up (for better test mAP)
r = min(r, 1.0)
# Compute padding
ratio = r, r # width, height ratios
new_unpad = int(round(shape[1] * r)), int(round(shape[0] * r))
dw, dh = new_shape[1] - new_unpad[0], new_shape[0] - new_unpad[1] # wh padding
if auto: # minimum rectangle
dw, dh = np.mod(dw, stride), np.mod(dh, stride) # wh padding
elif scaleFill: # stretch
dw, dh = 0.0, 0.0
new_unpad = (new_shape[1], new_shape[0])
ratio = new_shape[1] / shape[1], new_shape[0] / shape[0] # width, height ratios
dw /= 2 # divide padding into 2 sides
dh /= 2
if shape[::-1] != new_unpad: # resize
img = cv2.resize(img, new_unpad, interpolation=cv2.INTER_LINEAR)
top, bottom = int(round(dh - 0.1)), int(round(dh + 0.1))
left, right = int(round(dw - 0.1)), int(round(dw + 0.1))
img = cv2.copyMakeBorder(img, top, bottom, left, right, cv2.BORDER_CONSTANT, value=color) # add border
return img, ratio, (dw, dh)
def xywh2xyxy(self,x):
# Convert nx4 boxes from [x, y, w, h] to [x1, y1, x2, y2] where xy1=top-left, xy2=bottom-right
y = np.copy(x)
y[:, 0] = x[:, 0] - x[:, 2] / 2 # top left x
y[:, 1] = x[:, 1] - x[:, 3] / 2 # top left y
y[:, 2] = x[:, 0] + x[:, 2] / 2 # bottom right x
y[:, 3] = x[:, 1] + x[:, 3] / 2 # bottom right y
return y
def nms(self,prediction, conf_thres=0.1, iou_thres=0.6, agnostic=False):
if prediction.dtype is torch.float16:
prediction = prediction.float() # to FP32
xc = prediction[..., 4] > conf_thres # candidates
min_wh, max_wh = 2, 4096 # (pixels) minimum and maximum box width and height
max_det = 300 # maximum number of detections per image
output = [None] * prediction.shape[0]
for xi, x in enumerate(prediction): # image index, image inference
x = x[xc[xi]] # confidence
if not x.shape[0]:
continue
x[:, 5:] *= x[:, 4:5] # conf = obj_conf * cls_conf
box = self.xywh2xyxy(x[:, :4])
conf, j = x[:, 5:].max(1, keepdim=True)
x = torch.cat((torch.tensor(box), conf, j.float()), 1)[conf.view(-1) > conf_thres]
n = x.shape[0] # number of boxes
if not n:
continue
c = x[:, 5:6] * (0 if agnostic else max_wh) # classes
boxes, scores = x[:, :4] + c, x[:, 4] # boxes (offset by class), scores
i = torchvision.ops.boxes.nms(boxes, scores, iou_thres)
if i.shape[0] > max_det: # limit detections
i = i[:max_det]
output[xi] = x[i]
return output
def clip_coords(self,boxes, img_shape):
'''查看是否越界'''
# Clip bounding xyxy bounding boxes to image shape (height, width)
boxes[:, 0].clamp_(0, img_shape[1]) # x1
boxes[:, 1].clamp_(0, img_shape[0]) # y1
boxes[:, 2].clamp_(0, img_shape[1]) # x2
boxes[:, 3].clamp_(0, img_shape[0]) # y2
def scale_coords(self,img1_shape, coords, img0_shape, ratio_pad=None):
'''
坐标对应到原始图像上,反操作:减去pad,除以最小缩放比例
:param img1_shape: 输入尺寸
:param coords: 输入坐标
:param img0_shape: 映射的尺寸
:param ratio_pad:
:return:
'''
# Rescale coords (xyxy) from img1_shape to img0_shape
if ratio_pad is None: # calculate from img0_shape
gain = min(img1_shape[0] / img0_shape[0], img1_shape[1] / img0_shape[1]) # gain = old / new,计算缩放比率
pad = (img1_shape[1] - img0_shape[1] * gain) / 2, (
img1_shape[0] - img0_shape[0] * gain) / 2 # wh padding ,计算扩充的尺寸
else:
gain = ratio_pad[0][0]
pad = ratio_pad[1]
coords[:, [0, 2]] -= pad[0] # x padding,减去x方向上的扩充
coords[:, [1, 3]] -= pad[1] # y padding,减去y方向上的扩充
coords[:, :4] /= gain # 将box坐标对应到原始图像上
self.clip_coords(coords, img0_shape) # 边界检查
return coords
def sigmoid(self,x):
return 1 / (1 + np.exp(-x))
def infer(self,img_path,img_size=(640,640),conf_thres=0.25,iou_thres=0.45,class_num=1):
stride=[8,16,32]
anchor_list= [[10,13, 16,30, 33,23],[30,61, 62,45, 59,119], [116,90, 156,198, 373,326]]
anchor = np.array(anchor_list).astype(np.float).reshape(3,-1,2)
area = img_size[0] * img_size[1]
size = [int(area / stride[0] ** 2), int(area / stride[1] ** 2), int(area / stride[2] ** 2)]
feature = [[int(j / stride[i]) for j in img_size] for i in range(3)]
# 读取图片
src_img=cv2.imread(img_path)
src_size=src_img.shape[:2]
# 图片填充并归一化
img=self.letterbox(src_img,img_size,stride=32)[0]
# Convert
img = img[:, :, ::-1].transpose(2, 0, 1) # BGR to RGB, to 3x416x416
img = np.ascontiguousarray(img)
# 归一化
img=img.astype(dtype=np.float32)
img/=255.0
# # BGR to RGB
# img = img[:, :, ::-1].transpose(2, 0, 1)
# img = np.ascontiguousarray(img)
# 维度扩张
img=np.expand_dims(img,axis=0)
# 前向推理
start=time.time()
input_feed=self.get_input_feed(img)
pred=self.onnx_session.run(output_names=self.output_name,input_feed=input_feed)
#提取出特征
y = []
y.append(torch.tensor(pred[0].reshape(-1,size[0]*3,5+class_num)).sigmoid())
y.append(torch.tensor(pred[1].reshape(-1,size[1]*3,5+class_num)).sigmoid())
y.append(torch.tensor(pred[2].reshape(-1,size[2]*3,5+class_num)).sigmoid())
grid = []
for k, f in enumerate(feature):
grid.append([[i, j] for j in range(f[0]) for i in range(f[1])])
z = []
for i in range(3):
src = y[i]
xy = src[..., 0:2] * 2. - 0.5
wh = (src[..., 2:4] * 2) ** 2
dst_xy = []
dst_wh = []
for j in range(3):
dst_xy.append((xy[:, j * size[i]:(j + 1) * size[i], :] + torch.tensor(grid[i])) * stride[i])
dst_wh.append(wh[:, j * size[i]:(j + 1) * size[i], :] * anchor[i][j])
src[..., 0:2] = torch.from_numpy(np.concatenate((dst_xy[0], dst_xy[1], dst_xy[2]), axis=1))
src[..., 2:4] = torch.from_numpy(np.concatenate((dst_wh[0], dst_wh[1], dst_wh[2]), axis=1))
z.append(src.view(1, -1, 5+class_num))
results = torch.cat(z, 1)
results = self.nms(results, conf_thres, iou_thres)
cast=time.time()-start
print("cast time:{}".format(cast))
#映射到原始图像
img_shape=img.shape[2:]
print(img_size)
for det in results: # detections per image
if det is not None and len(det):
det[:, :4] = self.scale_coords(img_shape, det[:, :4],src_size).round()
if det is not None and len(det):
return self.draw(src_img, det)
def plot_one_box(self,x, img, color=None, label=None, line_thickness=None):
# Plots one bounding box on image img
tl = line_thickness or round(0.002 * (img.shape[0] + img.shape[1]) / 2) + 1 # line/font thickness
color = color or [random.randint(0, 255) for _ in range(3)]
c1, c2 = (int(x[0]), int(x[1])), (int(x[2]), int(x[3]))
cv2.rectangle(img, c1, c2, color, thickness=tl, lineType=cv2.LINE_AA)
if label:
tf = max(tl - 1, 1) # font thickness
t_size = cv2.getTextSize(label, 0, fontScale=tl / 3, thickness=tf)[0]
c2 = c1[0] + t_size[0], c1[1] - t_size[1] - 3
cv2.rectangle(img, c1, c2, color, -1, cv2.LINE_AA) # filled
cv2.putText(img, label, (c1[0], c1[1] - 2), 0, tl / 3, [225, 255, 255], thickness=tf, lineType=cv2.LINE_AA)
def draw(self,img, boxinfo):
colors = [[0, 0, 255],[0, 255, 255],[255, 0, 255],[0, 255, 0]]
for *xyxy, conf, cls in boxinfo:
label = '%s %.2f' % ('image', conf)
print('xyxy: ', xyxy)
self.plot_one_box(xyxy, img, label=label, color=colors[int(cls)], line_thickness=1)
return img
if __name__=='__main__':
parser = argparse.ArgumentParser()
parser.add_argument('--imgpath', type=str, default='/data1/gyx/QR/qr_detect_model/test_images/KFC', help="image path")
parser.add_argument('--modelpath', type=str, default='/data1/gyx/QR/multiyolov5_detect_seg/runs/train/qr_data_changeavg_channel3/weights/best-slim.onnx', help="onnx filepath")
parser.add_argument('--output', type=str, default='/data1/gyx/QR/multiyolov5_detect_seg/models/onnx_out', help='output folder') # file/folder, 0 for webcam
parser.add_argument('--imgsize', default=(320,320), type=int, help='image size')
parser.add_argument('--confThreshold', default=0.25, type=float, help='class confidence')
parser.add_argument('--iouThreshold', default=0.45, type=float, help='nms iou thresh')
args = parser.parse_args()
labels=['QR','MINIQR','DM','PDF']
for image_name in os.listdir(args.imgpath):
print(os.path.join(args.imgpath,image_name))
model=YOLOV5_ONNX(onnx_path=args.modelpath)
srcimg=model.infer(img_path=os.path.join(args.imgpath,image_name),img_size=args.imgsize,conf_thres=args.confThreshold,iou_thres=args.iouThreshold,class_num=len(labels))
# winName = 'Deep learning object detection in onnxruntime'
# cv2.namedWindow(winName, cv2.WINDOW_NORMAL)
# cv2.imshow(winName, srcimg)
# cv2.waitKey(0)
# cv2.destroyAllWindows()
cv2.imwrite(os.path.join(args.output,image_name),srcimg)