ROS1中使用Python发布和订阅主题
ROS是开发机器人应用的极具生产力的工具,最常用于概念开发、算法验证。在算法开发工具中,Python是一个极佳的选择,因为Python的工具包十分丰富,脚本语言的特性也使得无需编译,算法修改方便。
本文以ROS1为开发环境,以经典的Turtlesim的发布和订阅为例子,介绍用Python开发ROS机器人应用的步骤。例子中将实现用Python控制小乌龟的运动。
1. 操作系统Ubuntu18.04,安装ROS1、Python,网上安装教程很多,不再赘述。安装成功的标志是:终端中运行 roscore,不报错;终端中运行 python,不报错。
2. 通常安装ROS1后,会附带turtlesim功能包,在终端中运行 rosrun turtlesim turtlesim_node,会有一只很可爱的小乌龟出现在窗口中。

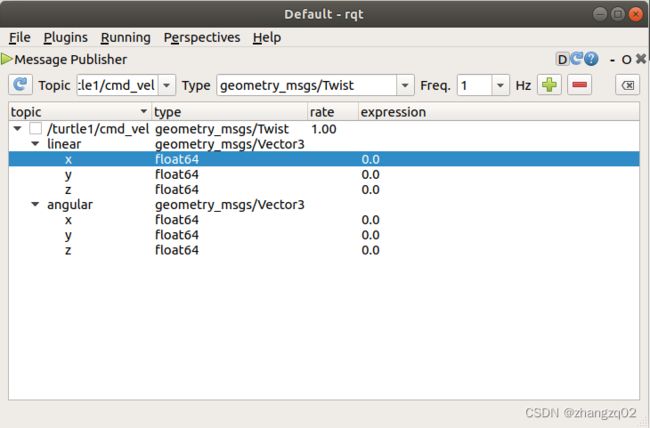
3. ROS1实际上就是实现了一个通信机制,发布/订阅是其中主要的一个通信形式。如果想查看有哪些主题在发布和订阅,可以通过命令,当然还有更直接的方式,就是用ROS1自带的rqt工具,在终端中运行 rqt,即出现可视化工具了。如果turtulesim还在运行的话,可以看到Topic中看到turtle1/cmd_vel这一主题,以及它的类型、刷新频率,这一主题实际上就是小乌龟的线速度、角速度指令了,如果去改一下数值,是可以在实际的Turtlesim窗口中观察到小乌龟的运动的。
4. 了解了ROS1的通信机制,那小乌龟的运动控制思路就很简单了:只要给相应的主题发指令就行了。我们的Python代码的目的也很明确了:新建一个节点 -> 连接到一个话题 -> 向话题发布信息。
就这么简单,下面就构建ROS1中的Python开发环境,用到caktin指令。
5. 在Ubuntu中新建文件夹,作为工作空间,文件夹下新建src文件夹,这很重要,编译时要找这个文件夹的。
6. 定位到src文件夹下,运行终端,输入命令 catkin_init_workspace,初始化工作空间。再输入命令 catkin_create_pkg demo rospy std_msgs,建立文件包,这里的demo是起的包的名字,请修改成你自己的包的名字。不出意外的话,src文件夹下自动出现了demo文件夹,下面有自动建立的一系列文件和文件夹。
7. 定位到src/demo文件夹下,新建scripts文件夹,这是python文件的存放位置,当然也可以放在别的位置,后面可以在CMakeLists文件中修改。在scripts文件夹下新建python文件,比如 talker.py。右键修改其属性为 Allow executing file as program,这一步很关键,否则后面运行会提示找不到可执行文件。
8. 双击打开,用文本编辑该文件。输入你的python程序,比如下面,注意检查语法中的缩进字符:
#! /usr/bin/env python
import rospy
from geometry_msgs.msg import Twist
import numpy as np
def talker():
rospy.init_node('talker', anonymous=True)
pub = rospy.Publisher('turtle1/cmd_vel', Twist, queue_size=10)
rate = rospy.Rate(1) # 1hz
while not rospy.is_shutdown():
vel_msg = Twist()
vel_msg.linear.x = 0.5 * np.random.uniform(-1, 1)
vel_msg.angular.z = 0.2 * np.random.uniform(-1, 1)
pub.publish(vel_msg)
rate.sleep()
if __name__ == '__main__':
try:
talker()
except rospy.ROSInterruptException:
pass
9. 修改CMakeList.txt,主要是找到 catkin_install_python 这一重要信息,将它从注释中释放出来,并把my_python_script修改为你的python文件的地址。(看到第7步中建立scripts文件夹的意义了吧)
## Mark executable scripts (Python etc.) for installation
## in contrast to setup.py, you can choose the destination
catkin_install_python(PROGRAMS
scripts/my_python_script
DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
10. 定位到工作空间根目录,在终端中运行命令 catkin_make demo,这里demo是包的名字。可以看到自动生成了一系列文件,build中存放的是可执行文件,devel中存放的是安装包。
11. 在终端中运行 source devel/setup.bash,这一步是将包的名字放到环境变量中,否则后面ROS会提示无法找到这个包。
12. 万事具备,来检验一下我们的环境是否搭建成功吧。首先运行 roscore,启动基础通信服务;然后运行 rosrun turtlesim turtlesim_node,启动小乌龟程序,该程序订阅了turtle1/cmd_vel主题;最后运行 rosrun demo talker.py,启动我们的python程序,程序将按照1Hz的频率向主题turtle1/cmd_vel发布数据。可以看到我们的小乌龟按照预期运动起来了!

13. python程序可以随时修改,但修改后要先 ctrl+c 结束运行,然后重新输入 rosrun demo talker.py,才可以执行新的程序。
其实gazebo仿真算法的思路也是类似的,主要就是用rqt找到相应的主题,然后订阅或发布数据给该主题。剩下就是python算法的设计了。