Point GNN环境配置及运行
Point GNN配置及运行
文章目录
- Point GNN配置及运行
-
-
- 1. 官方项目地址
- 2. 多CUDA共存
- 3. Python3.6 VSCode 调试不可用
- 4. 因protobuf版本太高,tensorflow无法import
- 5. 检查TensorFlow GPU支持
- 6. KITTI数据集下载
- 7. KITTI bat点云转pcd
- 8. 官方代码没有给3D检测框,你可以找到这部分代码,修改并查看结果
-
1. 官方项目地址
GitHub - WeijingShi/Point-GNN: Point-GNN: Graph Neural Network for 3D Object Detection in a Point Cloud, CVPR 2020.
2. 多CUDA共存
1.1 多CUDA共存
建议使用和tensorflow1.15.0版本匹配的CUDA,例如CUDA10.0,使用该版本CUDA后,可以正常运行项目,不存在报错
可参考以下链接,修改环境变量以选择使用哪个版本的CUDA
win10系统上安装多个版本的cuda - Trouvaille_fighting - 博客园 (cnblogs.com)
1.2 修改CUDA DLL名称
我的电脑装了CUDA11.1,但TensorFlow 1.x不能用到高版本的CUDA,为支持TensorFlow 1.x, 可以将CUDA一些DLL名字从11/110,改为10/100

尝试直接拷贝v11.1重命名为v10.xfake, 并修改下面的dll名称后可用
不建议使用此方法,导致了后续tensorflow session跑不了
3. Python3.6 VSCode 调试不可用
升级到Python3.7版本后,Python Interpreter 可使用VSCode调试
(11条消息) vscode python3.6无法debug解决方案_Johnny__Wang__的博客-CSDN博客_vscode插件降级
4. 因protobuf版本太高,tensorflow无法import
![]()
(11条消息) 1. Downgrade the protobuf package to 3.20.x or lower._weixin_44834086的博客-CSDN博客
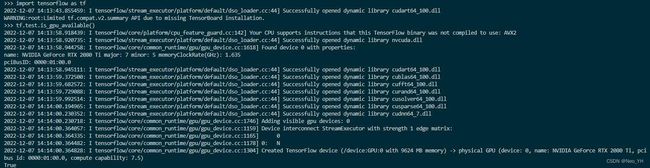
5. 检查TensorFlow GPU支持
6. KITTI数据集下载
https://www.cvlibs.net/datasets/kitti/eval_object.php?obj_benchmark=3d

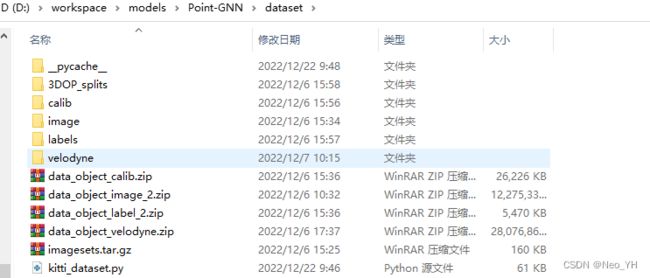
数据集较大38.5G左右,分为几个部分,我的组织方式如下
可参考官方项目操作,左值和右值图片只用下其中一个就行

7. KITTI bat点云转pcd
直接读bin文件也是可以的,提供这个方法用于在cloud compare等工具查看点云
KITTI数据集之点云建图 - 灰信网(软件开发博客聚合) (freesion.com)
int32_t num = 1000000;
int distance_threshold=20;
float *data = (float*)malloc(num * sizeof(float));
//
float *px = data + 0;
float *py = data + 1;
float *pz = data + 2;
float *pr = data + 3;//
//
FILE *stream;
fopen_s(&stream, inptfile, "rb");
num = fread(data, sizeof(float), num, stream) / 4;//
fclose(stream);
int32_t after_erase_num = 0;
int distance_threshold=20;
float *px_t = px;
float *py_t = py;
float *pz_t = pz;
float *pr_t = pr;//
for (int32_t i = 0; i < num; i++)
{
//setting a threshold according to the distance between the point and centre to decrease the points
double distance = sqrt((*px_t)*(*px_t) + (*py_t)*(*py_t) + (*pz_t)*(*pz_t));
if (distance < distance_threshold) {
fprintf(writePCDStream, "%f %f %f %f\n", *px, *py, *pz, *pr);
}
px_t += 4; py_t += 4; pz_t += 4; pr_t += 4;
}
fclose(writePCDStream);
8. 官方代码没有给3D检测框,你可以找到这部分代码,修改并查看结果
# convert to KITTI ================================================
detection_boxes_3d_corners = nms.boxes_3d_to_corners(
detection_boxes_3d)
pred_labels = []
for i in range(len(detection_boxes_3d_corners)):
detection_box_3d_corners = detection_boxes_3d_corners[i]
corners_cam_points = Points(xyz=detection_box_3d_corners, attr=None)
corners_img_points = dataset.cam_points_to_image(corners_cam_points, calib)
corners_xy = corners_img_points.xyz[:, :2]
if config['label_method'] == 'yaw':
all_class_name = ['Background', 'Car', 'Car', 'Pedestrian',
'Pedestrian', 'Cyclist', 'Cyclist', 'DontCare']
if config['label_method'] == 'Car':
all_class_name = ['Background', 'Car', 'Car', 'DontCare']
if config['label_method'] == 'Pedestrian_and_Cyclist':
all_class_name = ['Background', 'Pedestrian', 'Pedestrian',
'Cyclist', 'Cyclist', 'DontCare']
if config['label_method'] == 'alpha':
all_class_name = ['Background', 'Car', 'Car', 'Pedestrian',
'Pedestrian', 'Cyclist', 'Cyclist', 'DontCare']
class_name = all_class_name[class_labels[i]]
# for i in range(len(corners_xy)):
# cv2.circle(image, (int(corners_xy[i][0]), int(corners_xy[i][1])), 3, (255, 255, 125), -1)
# for i in range(len(corners_xy)):
# for j in range(len(corners_xy)):
# cv2.line(image, (int(corners_xy[i][0]), int(corners_xy[i][1])), (int(corners_xy[j][0]), int(corners_xy[j][1])), (0, 255, 0), 1)
cv2.line(image, (int(corners_xy[0][0]), int(corners_xy[0][1])), (int(corners_xy[1][0]), int(corners_xy[1][1])), (0, 255, 0), 1)
cv2.line(image, (int(corners_xy[0][0]), int(corners_xy[0][1])), (int(corners_xy[3][0]), int(corners_xy[3][1])), (0, 255, 0), 1)
cv2.line(image, (int(corners_xy[1][0]), int(corners_xy[1][1])), (int(corners_xy[2][0]), int(corners_xy[2][1])), (0, 255, 0), 1)
cv2.line(image, (int(corners_xy[2][0]), int(corners_xy[2][1])), (int(corners_xy[3][0]), int(corners_xy[3][1])), (0, 255, 0), 1)
cv2.line(image, (int(corners_xy[4][0]), int(corners_xy[4][1])), (int(corners_xy[5][0]), int(corners_xy[5][1])), (0, 255, 0), 1)
cv2.line(image, (int(corners_xy[6][0]), int(corners_xy[6][1])), (int(corners_xy[7][0]), int(corners_xy[7][1])), (0, 255, 0), 1)
cv2.line(image, (int(corners_xy[4][0]), int(corners_xy[4][1])), (int(corners_xy[7][0]), int(corners_xy[7][1])), (0, 255, 0), 1)
cv2.line(image, (int(corners_xy[5][0]), int(corners_xy[5][1])), (int(corners_xy[6][0]), int(corners_xy[6][1])), (0, 255, 0), 1)
cv2.line(image, (int(corners_xy[0][0]), int(corners_xy[0][1])), (int(corners_xy[4][0]), int(corners_xy[4][1])), (0, 255, 0), 1)
cv2.line(image, (int(corners_xy[1][0]), int(corners_xy[1][1])), (int(corners_xy[5][0]), int(corners_xy[5][1])), (0, 255, 0), 1)
cv2.line(image, (int(corners_xy[3][0]), int(corners_xy[3][1])), (int(corners_xy[7][0]), int(corners_xy[7][1])), (0, 255, 0), 1)
cv2.line(image, (int(corners_xy[2][0]), int(corners_xy[2][1])), (int(corners_xy[6][0]), int(corners_xy[6][1])), (0, 255, 0), 1)
'''
xmin, ymin = np.amin(corners_xy, axis=0)
xmax, ymax = np.amax(corners_xy, axis=0)
print(xmin, ymin, xmax, ymax)
clip_xmin = max(xmin, 0.0)
clip_ymin = max(ymin, 0.0)
clip_xmax = min(xmax, 1242.0)
clip_ymax = min(ymax, 375.0)
height = clip_ymax - clip_ymin
truncation_rate = 1.0 - (clip_ymax - clip_ymin)*(
clip_xmax - clip_xmin)/((ymax - ymin)*(xmax - xmin))
if truncation_rate > 0.4:
continue
x3d, y3d, z3d, l, h, w, yaw = detection_boxes_3d[i]
assert l > 0, str(i)
score = box_probs[i]
if USE_BOX_SCORE:
tmp_label = {"x3d": x3d, "y3d" : y3d, "z3d": z3d,
"yaw": yaw, "height": h, "width": w, "length": l}
# Rescore or not ===========================================
inside_mask = dataset.sel_xyz_in_box3d(tmp_label,
last_layer_points_xyz[box_indices])
points_inside = last_layer_points_xyz[
box_indices][inside_mask]
score_inside = box_probs_ori[inside_mask]
score = (1+occlusion(tmp_label, points_inside))*score
pred_labels.append((class_name, -1, -1, 0,
clip_xmin, clip_ymin, clip_xmax, clip_ymax,
h, w, l, x3d, y3d, z3d, yaw, score))
if VISUALIZATION_LEVEL > 0:
cv2.rectangle(image,
(int(clip_xmin), int(clip_ymin)),
(int(clip_xmax), int(clip_ymax)), (0, 255, 0), 2)
if class_name == "Pedestrian":
cv2.putText(image, '{:s} | {:.3f}'.format('P', score),
(int(clip_xmin), int(clip_ymin)-int(clip_xmin/10)),
cv2.FONT_HERSHEY_SIMPLEX, 0.4, (255, 255, 0) ,1)
else:
cv2.putText(image, '{:s} | {:.3f}'.format('C', score),
(int(clip_xmin), int(clip_ymin)),
cv2.FONT_HERSHEY_SIMPLEX, 0.4, (0, 255, 0) ,1)
'''
nms_time = time.time()
time_dict['nms'] = time_dict.get('nms', 0) + nms_time - decode_time
推理的结果
