YOLOv8实践 | 手把手训练教学及YOLOv8的多任务使用
作者 | 小书童 编辑 | 汽车人
点击下方卡片,关注“自动驾驶之心”公众号
ADAS巨卷干货,即可获取
点击进入→自动驾驶之心【目标检测】技术交流群
后台回复【2D检测综述】获取鱼眼检测、实时检测、通用2D检测等近5年内所有综述!
1、YOLOv8_Efficient的介绍
Github地址:https://github.com/isLinXu/YOLOv8_Efficient
本项目基于ultralytics及yolov5等进行综合参考,致力于让yolo系列的更加高效和易用。
目前主要做了以下的工作:
参考https://docs.ultralytics.com/config/中的Configuration参数,分别针对train.py、detect.py、val.py等做了相应参数的配置对齐。

结合yolov5的使用习惯以及代码结构做了兼容和优化。
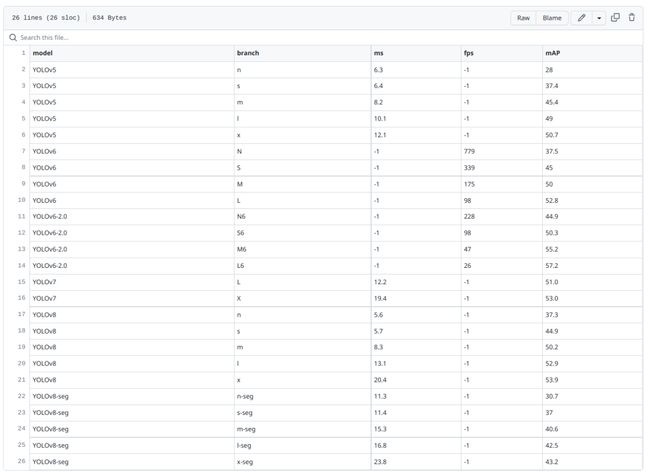
通过在coco数据集上在自己的机器上进行验证和计算的权重的指标参数,实验记录存放在https://github.com/isLinXu/YOLOv8_Efficient/tree/main/log.实验数据记录在:

根据计算出来的结果绘制了相应的指标参数对比图,这个绘图程序也开源在https://github.com/isLinXu/model-metrics-plot中。
融合其他更多网络模型结构进行集成整合和配置,正在进行中...
2、关于ultralytics的名字
为什么这个仓库取名为ultralytics,而不是yolov8,结合这个issue,笔者认为主要有以下几个方面的原因:
1.因为ultralytics团队希望将这个项目设计和建成一个集合分类,检测,分割等视觉任务的集成训练推理框架,而不仅仅只是yolov8。后续可能会有更多更全的网络模型会集成进来。
2.因为pypi.org上的第三方已经把yolov6,yolov7,yolov8等名字给取了,pip install名称的规则是不允许有重复名的。

issue链接:https://github.com/ultralytics/ultralytics/issues/179
3、关于自定义配置模型训练
结合上面的讨论,自然而然会有这个想法,既然ultralytics要建一个集成训练框架,那么能否直接在ultralytics仓库上直接配置和训练yolov5呢,笔者做了下面一系列的尝试:
在models中加入相应的.yaml文件和yolov5沿用的模块,如common.py、experimental.py、google_utils.py
在
models/common.py中,加入了yolov5所需的网络结构class C3(nn.Module): # CSP Bottleneck with 3 convolutions def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion super().__init__() c_ = int(c2 * e) # hidden channels self.cv1 = Conv(c1, c_, 1, 1) self.cv2 = Conv(c1, c_, 1, 1) self.cv3 = Conv(2 * c_, c2, 1) # optional act=FReLU(c2) self.m = nn.Sequential(*(Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n))) def forward(self, x): return self.cv3(torch.cat((self.m(self.cv1(x)), self.cv2(x)), 1))在运行时加入模块用于测试
最后一通操作下来,已经可以根据yolov5s.yaml去读取网络结构了,但是在跑的时候还是报错。
报错信息如下:

于是针对"train_args"做了一个全局搜索,发现了下面的结果:
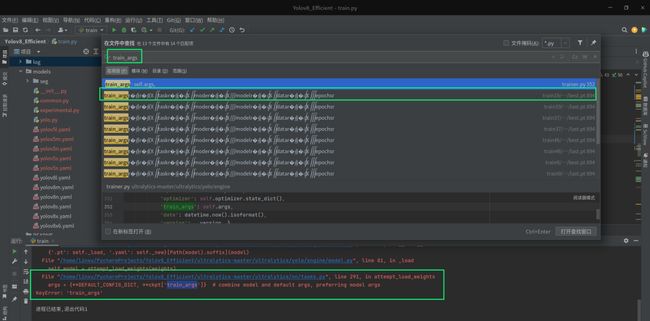
可以看到,之前训练出来的v8的权重内包含了"train_args"的信息。顺着程序运行的流程,相应地发现了yolo/engine/model中的"__init__(self)"函数,
def __init__(self, model='yolov8n.yaml', type="v8") -> None:
"""
Initializes the YOLO object.
Args:
model (str, Path): model to load or create
type (str): Type/version of models to use. Defaults to "v8".
"""
self.type = type
self.ModelClass = None # model class
self.TrainerClass = None # trainer class
self.ValidatorClass = None # validator class
self.PredictorClass = None # predictor class
self.model = None # model object
self.trainer = None # trainer object
self.task = None # task type
self.ckpt = None # if loaded from *.pt
self.ckpt_path = None
self.cfg = None # if loaded from *.yaml
self.overrides = {} # overrides for trainer object
self.init_disabled = False # disable model initialization
# Load or create new YOLO model
{'.pt': self._load, '.yaml': self._new}[Path(model).suffix](model)读取模型和配置是在"__init__"的最后一行:
# Load or create new YOLO model
{'.pt': self._load, '.yaml': self._new}[Path(model).suffix](model)而def _load(self, weights: str):中实际读取模型权重的实现是self.model = attempt_load_weights(weights)。可以看到,相比于yolov5,v8读取权重的函数attempt_load_weights,多了下面这行
args = {**DEFAULT_CONFIG_DICT, **ckpt['train_args']} # combine model and default args, preferring model args那么,能否直接将v5的项目中,将相应的函数补充过来给v8做适配呢,自然是可以的,当笔者将model.py的_load函数中这行代码:
self.model = attempt_load_weights(weights)替换为下面这行时:
self.model = attempt_load(weights)重新运行了一遍,发现又出现了下面的问题:
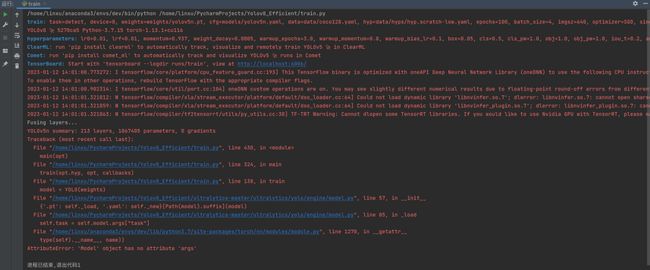
错误信息为AttributeError: 'Model' object has no attribute 'args',既然是Model定义和配置上的问题,那么就没有再往下修改的必要了,还是等官方团队的更新和修改吧,等等党永远不亏。
4、关于v8的多任务使用
根据官方的文档介绍,还有对代码的分析,目前v8项目是支持检测、分类和分割的。设定是通过"task"进行区分任务,又通过mode来设置是训练还是检测的模式,如下使用:
yolo task=detect mode=train model=yolov8n.yaml epochs=1 ...
... ... ...
segment predict yolov8n-seg.pt
classify val yolov8n-cls.pt4.1、训练
| task | snippet | |
|---|---|---|
| Detection检测 | detect | yolo task=detect mode=train |
| Instance Segment分割 | segment | yolo task=segment mode=train |
| Classification分类 | classify | yolo task=classify mode=train |
4.2、预测
| task | snippet | |
|---|---|---|
| Detection检测 | detect | yolo task=detect mode=predict |
| Instance Segment分割 | segment | yolo task=segment mode=predict |
| Classification分类 | classify | yolo task=classify mode=predict |
4.3、验证
| task | snippet | |
|---|---|---|
| Detection检测 | detect | yolo task=detect mode=val |
| Instance Segment分割 | segment | yolo task=segment mode=val |
| Classification分类 | classify | yolo task=classify mode=val |
!关于这三个任务,YOLOv8_Efficient项目后续会分别设置相应的模块用于执行,目前正在更新中。
5、附件
5.1、YOLOv8读取权重
def attempt_load_weights(weights, device=None, inplace=True, fuse=False):
# Loads an ensemble of models weights=[a,b,c] or a single model weights=[a] or weights=a
from ultralytics.yolo.utils.downloads import attempt_download
model = Ensemble()
for w in weights if isinstance(weights, list) else [weights]:
ckpt = torch.load(attempt_download(w), map_location='cpu') # load
args = {**DEFAULT_CONFIG_DICT, **ckpt['train_args']} # combine model and default args, preferring model args
ckpt = (ckpt.get('ema') or ckpt['model']).to(device).float() # FP32 model
...5.2、YOLOv5读取权重
def attempt_load(weights, device=None, inplace=True, fuse=True):
# Loads an ensemble of models weights=[a,b,c] or a single model weights=[a] or weights=a
from models.yolo import Detect, Model
model = Ensemble()
for w in weights if isinstance(weights, list) else [weights]:
ckpt = torch.load(attempt_download(w), map_location='cpu') # load
ckpt = (ckpt.get('ema') or ckpt['model']).to(device).float() # FP32 model
...6、参考
[1].https://github.com/isLinXu/YOLOv8_Efficient.
[2].https://github.com/isLinXu/model-metrics-plot.
【自动驾驶之心】全栈技术交流群
自动驾驶之心是首个自动驾驶开发者社区,聚焦目标检测、语义分割、全景分割、实例分割、关键点检测、车道线、目标跟踪、3D目标检测、BEV感知、多传感器融合、SLAM、光流估计、深度估计、轨迹预测、高精地图、NeRF、规划控制、模型部署落地、自动驾驶仿真测试、硬件配置、AI求职交流等方向;

添加汽车人助理微信邀请入群
备注:学校/公司+方向+昵称