基于水平集LBF模型的图像边缘轮廓分割凸优化 - Split Bregman分裂布雷格曼算法的最优解
目录
1. 凸优化简介 :
2. 次梯度(subgradient):
次梯度概念:
次梯度例子:
次梯度存在性:
3. Bregman距离(布雷格曼距离) :
Bregman距离概念 :
Bregman距离的含义 :
介绍了一些准备知识,下面才开始正式的开始使用LBF模型的分裂布雷格曼迭代进行水平集分割轮廓.
4. LBF模型 :
5. Split Bregman 凸优化:
算法(Algorithm):
1. 凸优化简介 :
凸优化,或叫做凸最优化,凸最小化,是数学最优化的一个子领域,研究定义于凸集中的凸函数最小化的问题。譬如在凸优化中局部最优值必定是全局最优值。凸函数的凸性使得凸分析中的有力工具在最优化问题中得以应用,如次梯度等。
为什么要引入凸函数并最优化呢?最主要的原因就是凸函数的最优解就是全局最优解。
2. 次梯度(subgradient):
次梯度概念:
我们首先引入次梯度的概念,先来看一下次梯度的定义:
简单介绍一下,其中我们要找的次梯度就是  ,次梯度 是一个集合,该集合和自变量差的内积,小于等于两个自变量的函数值之差。
,次梯度 是一个集合,该集合和自变量差的内积,小于等于两个自变量的函数值之差。
当 ![]() 时 (
时 ( ![]() 表示
表示  的最优解 ,也就是
的最优解 ,也就是 ![]() 时, 有极小值 ),原式子如下:
时, 有极小值 ),原式子如下:


我们发现 ![]() 和
和 ![]() 的内积
的内积 ![]() ,内积大于等于
,内积大于等于  ,说明两向量的夹角
,说明两向量的夹角 ![]() °,所以当等式中的
°,所以当等式中的  朝着次梯度 的反方向前进时,那么就有很大可能性靠近最优解
朝着次梯度 的反方向前进时,那么就有很大可能性靠近最优解 ![]() ,所以负梯度
,所以负梯度![]() 就是可导函数局部的最速下降点,那么再每个局部点都沿着负梯度搜索下去就能收敛到全局最优点。由次梯度的定义可知,次梯度也具备着类似的性质,只不过次梯度不依赖于可导的条件罢了.
就是可导函数局部的最速下降点,那么再每个局部点都沿着负梯度搜索下去就能收敛到全局最优点。由次梯度的定义可知,次梯度也具备着类似的性质,只不过次梯度不依赖于可导的条件罢了.
需要注意的是函数在某点处的次梯度一般来说是一个集合,而并非一个点,这一点和梯度是有很大不同的,梯度一般是唯一的。我们用如下符号表示某点的次梯度:

只要满足次梯度那个定义的就是次梯度了,所有满足次梯度定义的构成了一个集合.
次梯度例子:
说到这里可能还是有点懵,初学者可能不太理解,那么举个例子说明一下。
我们都了解的 L1范数,L1范数的一维形式,也就是绝对值函数 : ![]() ,来了解一下此函数的次梯度是个什么情况.
,来了解一下此函数的次梯度是个什么情况.
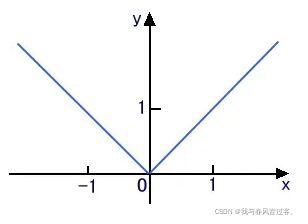
了解过凸优化的大佬应该都知道支撑超平面的概念,我也是初学者,就用我的话解释一下,我用一条线把这个 ![]() 函数都分到一边,而另一边没有这个函数,很明显,
函数都分到一边,而另一边没有这个函数,很明显,![]() ,
, 这两个函数都可以做到,所以函数
这两个函数都可以做到,所以函数 ![]() 在
在 ![]() 的次梯度集合为
的次梯度集合为 ![]()
下面用公式验证一下:
![]()
整理可得:
![]()
由此可得:
![]()
次梯度存在性:
次梯度什么时候存在?
凸函数是次梯度存在的必要条件,若不是凸函数,则必然会有某些点次梯度是空集,只有是凸函数才能保证任意一点的次梯度存在
3. Bregman距离(布雷格曼距离) :
Bregman距离概念 :
Bregman距离,又称Bregman散度,定义如下:
![]()
![]() 表示的是
表示的是 ![]() 之间的布雷格曼距离
之间的布雷格曼距离
简单说明一下,式中  表示的就是凸函数
表示的就是凸函数  ,一定要是凸函数!
,一定要是凸函数!
![]() 表示的是
表示的是  点的次梯度集合.
点的次梯度集合.
Bregman距离的含义 :
我们简单的整理一下上面的布雷格曼距离公式,如下:
![]()
我们会发现其中的  很像泰勒公式.
很像泰勒公式.
泰勒公式:![]() ,把等式右边减到左边,得出:
,把等式右边减到左边,得出:
![]()
我们发现 ![]() 时,完全一样,所以我们简易的把Bregman距离理解为:
时,完全一样,所以我们简易的把Bregman距离理解为:
与 ![]() 之间的Bregman距离
之间的Bregman距离 ![]() 实际上可以理解为函数 与其一阶泰勒近似之差.
实际上可以理解为函数 与其一阶泰勒近似之差.
介绍了一些准备知识,下面才开始正式的开始使用LBF模型的分裂布雷格曼迭代进行水平集分割轮廓.
4. LBF模型 :
我的方向是和牙齿分割有关,所以这里学习采用局部二元拟合(LBF)模型提取骨组织,在强度不均匀的情况下,具有较好的弱边缘提取性能。
论文中的LBF模型如下:

其中 ![]() 的定义论文中也提到了:
的定义论文中也提到了:
仔细看了一下和之前提到的 Chan-Vese 都差不多,M1(ϕ)=Hε(ϕ),M2(ϕ)=1-Hε(ϕ),Kσ是卷积核,和之前提到的其实大同小异.
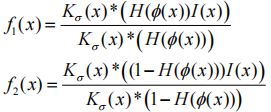
但是,LBF模型对初始条件很敏感,因为能量函数是非凸的,可能收敛于局部极小值。此外,使用梯度体面方案的能量函数的最小化过程将是耗时的。为了解决这两个问题,我们采用了Chan等人提出的全局凸分割方法,得到了LBF模型的全局凸版本为(为什么时凸的呢?):

其中: ,函数
,函数  是一个边缘指示器,非常简单,其式子表示为:
是一个边缘指示器,非常简单,其式子表示为:

也就是根据原图梯度引入的边缘指示器。
5. Split Bregman 凸优化:
看到这里,我们是要求这个凸函数的的最优解,也就是全局最优解,所以我们先把总的能量函数列出:
![]()
![]() 是水平集函数,K是卷积操作,
是水平集函数,K是卷积操作, 是图像矩阵,
是图像矩阵,![]() 为曲线内外灰度均值
为曲线内外灰度均值
首先,将用于边缘检测的全局优化凸能量函数简化为公式,公式如下:
![]()
就是要把能量函数化为上面这种形式,然后进行分裂布雷格曼算法的凸优化 ,通过以下方法将能量函数转化为上面这种形式:
之后,我们在这个求凸函数最优解问题中加入一个辅助变量 ![]() ,并且
,并且 ![]() ,这也是分裂布雷格曼问题的关键所在 . 然后在原式中引入一个二次惩罚函数
,这也是分裂布雷格曼问题的关键所在 . 然后在原式中引入一个二次惩罚函数 ![]() ,将约束最小化问题转化为无约束问题,原式如下 :
,将约束最小化问题转化为无约束问题,原式如下 :
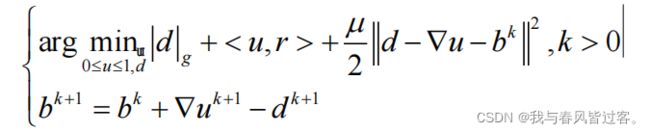
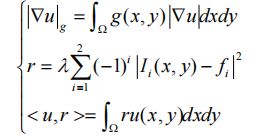
通过变分原理,我们可以上述公式中的最优解为 :

注意,正常求变分的时候,是 ![]() 的,但是上述式子中是
的,但是上述式子中是 ![]() ,这也是Split Bregman(分裂布雷格曼)迭代算法的特别之处,就是分裂水平集梯度为
,这也是Split Bregman(分裂布雷格曼)迭代算法的特别之处,就是分裂水平集梯度为  和.
和.  .
.
1 . 利用高斯塞德尔迭代法得到了  的近似解,论文中体现的 Gauss Seidel 迭代法为如下形式,作为如下定义:(我也自己总结了Gauss Seidel 迭代法,可以来看一看)
的近似解,论文中体现的 Gauss Seidel 迭代法为如下形式,作为如下定义:(我也自己总结了Gauss Seidel 迭代法,可以来看一看)

( 我认为 ![]() 最后不是
最后不是 ![]() 而是
而是 ![]() ,在复现的过程中也是
,在复现的过程中也是![]() )
)
最后返回新的水平集函数 ,也就是 ![]() .
.
2 . 对 的最小化使用以下公式执行:

其中 ![]() 方法为:
方法为:

式中的 ![]() 就定义为:
就定义为:

算法(Algorithm):
可能看到这里还是有点懵,但是作为计算机专业的同学,当看到算法流程的时候就都豁然开朗一些了 .
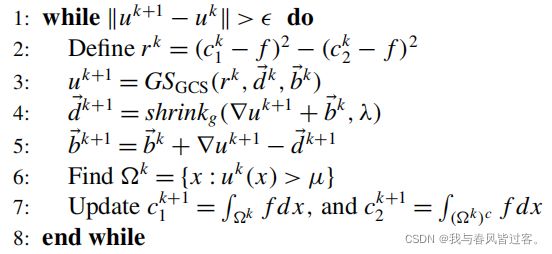
(初始值,![]() )
)
一开始我们知道 ![]() ,表示在迭代开始之前,
,表示在迭代开始之前,![]() ,但是我们引入了变量 。
,但是我们引入了变量 。
根据步骤 2 :使用该时刻的 ![]() , 得出下一时刻的
, 得出下一时刻的![]() 。
。
再根据步骤 3 :我们发现通过对 ![]() 和 做和的
和 做和的 ![]() 最小化,得出新的 ,也就是
最小化,得出新的 ,也就是 ![]()
再根据步骤 4 :我们用上两步得到的 ![]() 和
和 ![]() ,更新 得到新的
,更新 得到新的 ![]() .
.
最后设置阈值  重置水平集函数,并更新轮廓内外灰度平均值
重置水平集函数,并更新轮廓内外灰度平均值  也就是之前提到的
也就是之前提到的![]()
反复迭代计算,当上下两层水平集函数取  范数时误差小于一定程度时,停止迭代.
范数时误差小于一定程度时,停止迭代.
(最后说明一下,mu是阈值,lamuda是控制收缩速度的,越小收缩越快,但是越小就导致某些地方稀碎)
实验结果(绿色结果为分割部分,参数:![]() ,由于全局凸函数水平集初始数据我认为不重要):
,由于全局凸函数水平集初始数据我认为不重要):

最后留下一个我的疑点,Split Bregman 迭代算法中的  和 Bregman 距离的关系?
和 Bregman 距离的关系?
参考文献:
[4] Beck A. First-order methods in optimization[M]. SIAM, 2017.
[5] Nesterov Y. Introductory lectures on convex programming volume i: Basic course[J]. Lecture notes, 1998, 3(4): 5.