电机与拖动(戚金清版)学习整理
目录
电机的概念
第一章(磁路)
磁场的相关概念
磁路基本定律
磁路欧姆定律
磁路基尔霍夫定律
交流铁心线圈电路
第二章(变压器)
变压器的电压比
变压器的电流比
变压器二次侧阻抗变换
变压器的额定值
变压器的运行分析(等效电路图)
变压器的参数测定
空载试验
短路试验
变压器的外特性
电压调整率
三相变压器的联结组
三相变压器的并联运行
并联运行需要的条件
第七章(直流电机)
直流电机结构
直流电机的额定值
直流电机的电枢反应
直流电机的电磁转矩和电动势
直流电动机的运行分析
转速随转矩变化的情况称为机械特性
直流电动机的功率和转矩
直流发电机的运行分析
直流发电机的功率和转矩
第八章(直流电机电力拖动)
他励直流电动机的起动
他励直流电动机的调速
他励直流电动机的制动
①能耗制动
②反接制动
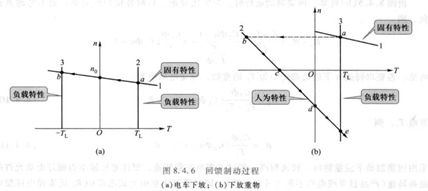
③回馈制动
第三章(异步电机的基本理论)
三相异步电动机的工作原理
三相异步电机的额定值
三相异步电机的电动势平衡方程
三相异步电动机的磁通势平衡方程
三相异步电机的运行分析:等效电路
三相异步电机的功率和转矩
第四章(异步电机的电力拖动)
电磁转矩公式
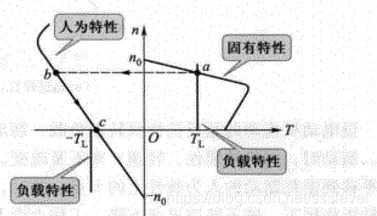
三相异步电动机的固有特性
人为特性
三相异步电机的起动
起动条件
笼型异步电机的起动
(1)定子串联电阻或电抗减压起动
(2)星形-三角形减压起动
(3)自耦变压器减压起动
(4)软起动器起动
绕线型异步电动机串联电阻起动
有级起动:起动步骤
三相异步电动机的调速
笼型异步电动机的调速
①变频调速
②变极调速
③定子降压调速
三相异步电动机的制动
①能耗制动
②反接制动
③回馈制动
电机的概念
电机是实现能量值转换和物质转换的电磁装置。用作能量转换的电机称作动力电机,用作信号转换的电机称作控制电机。动力电机又分为电动机和发电机。
第一章(磁路)
磁场的相关概念
磁通φ:穿过某一截面的磁感线数;
磁感应强度B:是一个矢量,描述磁场的方向和强度,数值是磁通/截面积;
磁场强度H:磁场计算时的辅助物理量,描述电流产生磁场的强弱;
磁导率:![]()
磁路基本定律
磁路:大量磁通集中通过的路径,又或者说是主磁通通过的路径
磁路欧姆定律
![]() ,其中F=NI=
,其中F=NI=![]()
磁路基尔霍夫定律
第一定律:在磁路的结点上磁通的代数和为0
第二定律:对于一条磁路上的多侧电流,电流产生的磁通顺应设定好的正方向磁通时,该磁通势为正;

交流铁心线圈电路

该电路的线圈电流产生的漏磁(即不在磁路之中的磁感应线)产生了漏电抗,线圈自身又产生电阻,可将二者视为漏阻抗;
在磁路中,该线圈电流的变化引起了磁路中磁场的变化,因此产生了励磁电阻(其中包括磁滞损耗和涡流损耗,针对磁滞损耗,采用硅钢这种软磁物质,减小损耗;对于涡流损耗,采用叠片式的铁心减小损耗)和励磁电抗,并合成励磁阻抗;其中需要注意的是,对于主磁通而言,电流的变化使得电路中产生了感应电动势![]() ,这个电动势就是励磁阻抗电压;
,这个电动势就是励磁阻抗电压;
第二章(变压器)
变压器的电压比
![]() ,这是由变压器二次侧中的
,这是由变压器二次侧中的![]() 得来的,而约等于号可以舍去时,则是把漏阻抗进行了省略;
得来的,而约等于号可以舍去时,则是把漏阻抗进行了省略;

变压器的电流比
 ,这可以通过磁通势平衡方程得到
,这可以通过磁通势平衡方程得到![]() (这个方程的产生是由
(这个方程的产生是由![]() 得到磁通不变再加上磁路阻抗不变得到的,其中
得到磁通不变再加上磁路阻抗不变得到的,其中 这个空载电流很小可以舍去,这可以通过将变压器化作等效电路的电路阻抗很大得到)
这个空载电流很小可以舍去,这可以通过将变压器化作等效电路的电路阻抗很大得到)
变压器二次侧阻抗变换
![]() 这个可以直接通过应用上述的电压电流比得到;
这个可以直接通过应用上述的电压电流比得到;
变压器的额定值
额定电压:单相变压器指的是空载运行时的高低压绕组电压的额定值(此时绕组处的阻抗非常大)
对于三相变压器指的是空载运行时的线电压大小(三相变压器相电压是绕组电压,线电压是电源输送电压和输送负载电压)
额定电流:单相变压器指的是变压器在满载运行时的高低压绕组电流数值。
对于三相变压器指的是满载运行时的线电流大小
额定容量:单相变压器![]() ;三相变压器
;三相变压器![]()
我国规定的工作频率是50HZ;
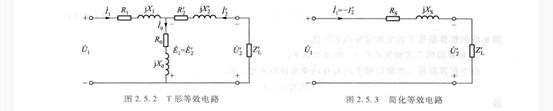
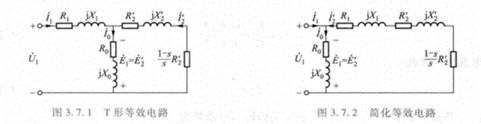
变压器的运行分析(等效电路图)
核心是等效电路图,由此可以试一试方程式,向量图等;
二次侧电压换算:E2*k;二次侧电流换算:I2/k;阻抗换算:![]() (由此得一二次侧电动势相同,二次侧功率大小不变);消去电动势时用空载时的阻抗支路即可使方程式
(由此得一二次侧电动势相同,二次侧功率大小不变);消去电动势时用空载时的阻抗支路即可使方程式![]() 得到满足;当忽略I0时即可得到简化电路;
得到满足;当忽略I0时即可得到简化电路;
变压器的参数测定
空载试验
高压绕组做二次绕组空载,低压绕组做一次绕组加入额定电压,通过测定的电压电流值可以得到
1铁损耗(因为电流很小,铜损耗很小)2低压侧的励磁阻抗模![]() (由铁损耗可以得到低压侧励磁电阻,通过勾股得到励磁电抗)3近似电压比(通过省略低压侧的漏阻抗得到)
(由铁损耗可以得到低压侧励磁电阻,通过勾股得到励磁电抗)3近似电压比(通过省略低压侧的漏阻抗得到)
短路试验
低压侧作二次绕组,高压侧作一次绕组不断加压至二次绕组电流达到额定值,通过测定的电压电流可以得到:
1铜损耗(此时电压远远低于额定值,铁损耗很小忽略)2 短路阻抗(电阻由铜损耗得,电抗由勾股得)
3短路电压的标么值(短路电压是短路试验的一次侧电压,它的标么值![]()
对于温度a的短路试验电阻换算成75摄氏度的电阻有以下公式:
铜线:![]() ;铝线:
;铝线:![]()
变压器的外特性
即一次侧电压和负载功率因素不变的条件下的二次侧电压随二次侧电流变化的情况;
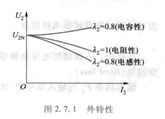
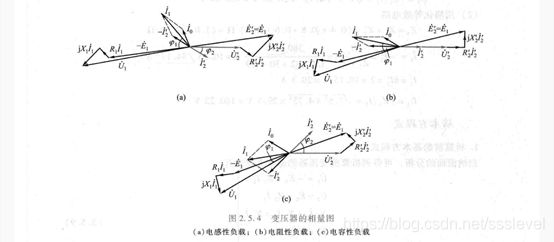
由向量图可知,只有当负载是电容性时电压U2的数值才可能大于电动势。
电压调整率
![]() (表示从空载到满载的电压变化程度)
(表示从空载到满载的电压变化程度)
三相变压器的联结组
高压侧三种联结方式:Y,YN,D;低压侧三种联结方式:y,yn,d;
 如左图,在同一条竖线下的两个绕线段表示其感应后的电压方向在同一条直线,而小黑点代表的是同一极性的端口,由此可知左图的U1,U2和u1,u2的方向相反;
如左图,在同一条竖线下的两个绕线段表示其感应后的电压方向在同一条直线,而小黑点代表的是同一极性的端口,由此可知左图的U1,U2和u1,u2的方向相反;
对于其向量图的画法步骤是:
高压侧:先标U1,U2两点,使其指向12点方向,再依此确定其它点的位置(注意绕组相序从左到右代表顺时针方向)
低压侧:可以直接根据高压侧画出,即用极性和在同一竖线的依据来画;
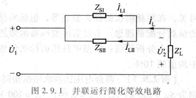
三相变压器的并联运行
将二次绕组并联后向外供电
并联运行需要的条件
1电压比相同2联结组相同3短路阻抗的表么值相同
前两个条件关系到电路会不会产生环流,第三个条件关系到并联运行是否合理,其中包括阻抗模的标么值相等则电路根据每个变压器的额定容量分配运行容量,而阻抗角相等,总负载为各变压器分担的总负载的算数和。
第七章(直流电机)
左手定则(电动机定则):电动机中通电线圈在磁场作用下受到力的作用
右手定则(发电机定则):发电机中转动的线圈切割磁感线产生感应电流
直流电机结构
定子:主磁极,换向磁极,机座,电刷装置,端盖
转子:电枢铁心,电枢绕组,换向器,转轴,风扇
直流电机的额定值
额定功率:电动机指的是电源输入的额定功率,发电机指的是输出电源的额定功率
额定电压:电动机指的是电源的输入额定电压值,发电机指的是输出电源的额定电压值
额定电流:电动机指的是电源的输入额定电流值,发电机指的是输出电源的额定电流值
额定转速:电机在额定状态下的转速
额定效率:电机输出输入功率百分比
直流电机的电枢反应
电枢磁通势对合成磁通势的影响称为电枢反应
影响:
1磁场被扭曲,使物理中心线(磁场的对称轴线)和几何中心线(磁极间的平分线)不一致,被电刷短路的换向线圈中的电动势不为零,增加了换向的难度
2一半磁极磁通增加,一半磁极磁通减小。当不饱和时,增加和减少的量相同,当饱和时,增加少,减少多,总磁通减少,电动势和电磁转矩随之减小。
直流电机的电磁转矩和电动势
 ,
,![]() ,其中
,其中
直流电动机的运行分析
1直流电动机的过载能力:
2转速:
转速随转矩变化的情况称为机械特性
他励电动机,并励电动机的机械特性:![]()
转速n随转矩变化的变化不大,表现为硬特性;
励磁电源直接切断的两种事故:
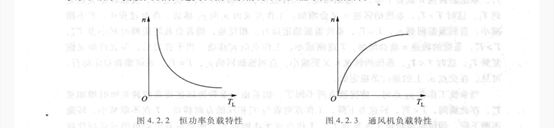
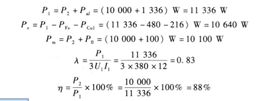
1闷车:此时磁通减小,E减小,Ia增加,如果Ia增加的效果弱于磁通减小的效果(即T 2飞车:如果Ia增加的效果大于磁通减小的效果(即T>TL),此时不仅电流的突然增大可能烧坏设备,而且转速的增加很可能超过允许值。 串励电动机的机械特性: 复励电动机吸取并励和串励的优点,启动转矩和过载能力大并且可以在空载和轻载的条件下运行; P1=UI为输入功率; 其中 空载特性:空载时的输出电压随励磁电流变化的情况,与磁化曲线类似 电压调整率: 并励发电机: 自励条件:1有剩磁2励磁电流所产生的磁场和剩磁方向相同3励磁电路的电阻要小于临界电阻(即代表励磁电阻和电枢电阻之和的场阻线与空载特性曲线相交于饱和曲线处,能够稳定在较大的电压上) 其中 1降低电枢电压起动:起动平稳但是初期投资大 2增加电枢电阻起动: 无级起动:串入可变电阻 有级起动步骤: ①确定起动电流 ②确定起动级数 ③取m为相近的整数,求出 ④通过 各种负载的特性: ①改变电枢电阻调速②该变电枢电压调速③改变励磁电流调速 切断电枢电源,增添限流电阻。 运行分析: 迅速停机:制动瞬间,转速不变,电动势不变,电流反向,转矩反向,转速不断减小到零 制动瞬间的电流 停机之后:转速反向增大直到T=TL 若需要以转速n下放重物,由 迅速停机:电压反向反接制动,电压反向并串一电阻。 Rb由 下放重物:电压不必反接,还需串联一电阻,由此更改机械特性 正向回馈制动:电车下坡,电路未变,转速超过空载状态,逐渐上升,电动机变成发电机,机械功回馈电源 反向回馈制动:下放重物,与电压反向反接制动类似,但在转速反向并逐渐提高过程中超过了空载状态转速,形成发电机式反馈。串联电阻满足 异步电机:异步发电机在性能上有很多缺陷,极少使用,主要做异步电动机 定子旋转磁场:定子接入三相电源,合成的磁场在电流的变化下在空间旋转; 其中旋转角度有如下关系: 电角度=磁极对数*机械角度(机械角度是磁场在空间中转过的角度,电角度是电流转过的角度) 旋转磁场的转速: 由转子转速小于磁场转速,称’异步‘电机,有转差率 异步电机的各运行状态: 改变转子方向:将三相电源的任意两项互换即可; 三相绕组: 槽距角 三相绕组的种类: 笼型绕组定子磁极对数=转子磁极对数;绕线型绕组转子和定子绕组都采用星形联结; 额定功率PN:在额定状态下,轴上输出的功率 额定电压UN:在额定状态下定子三相绕组的线电压 额定电流IN:在额定状态下定子三相绕组的线电流 额定转速nN:由磁极对数和额定转差率确定 有 定子电动势平衡方程式: 其中 转子电动势平衡方程式: 转子静止时的电抗为 对于绕组因素 其中 脉振磁场:单相电流通过单相绕组在电机中产生方位不变而大小和方向随时间变化按正弦规律变化的磁场 由于气隙的存在得到气隙基波磁通势为 又因为旋转磁场的叠加可以得到m相绕组通过m项电流产生的基波旋转磁通势的幅值为 转子往定子侧进行折算; ①先将旋转的转子折算成静止的转子得到与定子相同的频率; ②将①折算后的转子再折算成与定子相数和有效匝数相同的转子; 依据此,可以通过磁通势相等折算电流 折算后的转子电动势 这算后的转子阻抗 依据上述所求可以得到T形电路,又因为定转子之间存在气隙产生了较大磁通势,不可认为空载I0很小,所以有另一种简化电路; 输入功率 电磁转矩 机械功率 输出功率 三相异步电动机的电磁转矩: 电磁转矩: 空载转矩: 输出转矩: 物理公式: 参数公式: 实用公式: 由实用公式可得: 定子电压和频率都保持为额定值,若是绕线型异步电机其转子电路不串联电阻或电抗的转矩特性和机械特性 固有特性的三个状态: ①额定状态N:此时电机工作在额定值,其说明了电动机的长期运行能力; ②临界状态M:临界状态说明了电动机的短时过载能力;通常用 ③堵转状态S:堵转状态说明了电动机的直接启动能力; ①减小定子电压:由SM与电压无关,T与电压的平方成正比得: ②增加转子电阻时的人为特性:由SM与转子电阻成正比,而TM和转子电阻无关得: 其中,起动转矩TS的大小与R2与X2的比值有关当R2增加时 R2 电动机稳定运行的条件: ①起动转矩要足够大:一般取(1.1~1.2)TL ②起动电流不能超过允许范围 ①直接起动:一般情况下,7.5kw的笼型异步电机可以直接起动,满足如下条件也可以直接起动: ②减压起动:减小电源电压进而减小起动电流但同时也减小起动转矩,适合轻载或空载起动 有四种起动方式 串电阻损耗大,适合低压小功率电动机;串电抗投资大,适合高压大功率电动机 起动前定子按星形连接,启动后定子按三角形连接; 起动电流比: 电源电流比: 起动转矩比: 接入自耦变压器减压,减压比 起动电流比: 电源电流比: 起动转矩比: 使用软起动器自动调节输入电压; 无级起动:串联电阻最大值为: ①选择起动转矩 ②确定起动级数 ③m选取相近整数后重新计算 ④确定各级电阻 电动机的调速指标: 调速范围: 调速的稳定性:使用静差率: 静差率和机械特性的硬度 当 当 通过改变定子绕组的并串联可以进行变极; 对于 通过改变定子电压,使得T减小,进而改变转速; 需要注意的是对于恒转矩负载和恒功率负载而言,只能在nM以上调速,在nM之下则不能稳定运行,调速范围有限,对于通风机负载则所有交点都可以调速; 绕线型异步电动机串电阻调速:串联电阻使得sM减小,转速下调,转差率和电阻同时变化经过推导得到转矩不变,适应恒转矩负载; 制动时,三相电源改接成直流电源并在转子加入一个制动电阻Rb,此时转子切割恒定磁感线产生了与转速相反的转矩,使其停机;当停机后,重物拖动转子旋转,继续切割恒定磁感线,此时依旧产生与转速相反转矩直至平稳下放重物; 迅速停机:反向反接制动,改变三相电源相序,使其产生的旋转磁场反转,使转子快速停止,当转速为零时,立刻切断电源; 下放重物:不改变三相电源相序,在转子中加入适当的制动电阻,使其T=TL,转向相反; 调速过程中的回馈制动:如调频过程中,n0突然减小,n不变,此时n>n0,电动机为发电机状态,称回馈制动; 下放重物的回馈制动:与反向反接制动类似,但是但转速为负值且超过-n0时,进入回馈制动状态,即重物发电; 电机拖动的一些典型例题: 第四章: ① 这题考察异步电机的变频调速:对于频率降低知道,改变了频率和电压,通过 ② 这题考察制动原理:与制动电阻有关的量 第三章: ① 考察等效电路, ② 考察此图: 第八章: ① 考察直流电动机的有级起动: ② 考察机械特性和制动原理 第七章 ① 电动机功率和转矩 ② 发电机功率和转矩 第二章 ① 短路电阻Rs包括R1和二次侧折算到一次侧的电阻R2‘,并且短路电阻需要进行温度折算且有电压调整率公式: ② 第一章:  ,其机械特性为软特性;
,其机械特性为软特性;
直流电动机的功率和转矩
![]() (电磁功率);
(电磁功率);![]() (输出功率);
(输出功率); (空载损耗);
(空载损耗);![]() 为线转速;
为线转速;直流发电机的运行分析
![]()
直流发电机的功率和转矩
![]() (输入的机械功率);
(输入的机械功率);![]() (机械功率,对电动机而言是电转化后的机械功率,所以只减去铜损耗;对发电机而言是机械功率转化后的电功率,所以需要减去P0);
(机械功率,对电动机而言是电转化后的机械功率,所以只减去铜损耗;对发电机而言是机械功率转化后的电功率,所以需要减去P0);![]() (输出功率)
(输出功率)![]()
第八章(直流电机电力拖动)
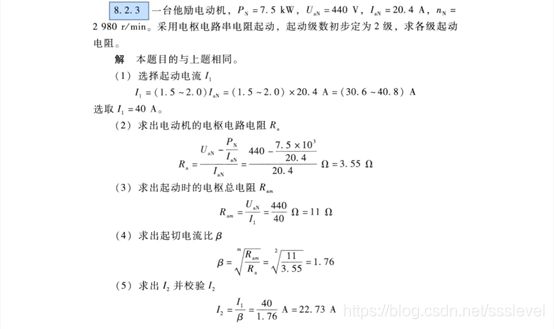
他励直流电动机的起动
![]() ,切换电流
,切换电流![]() ,并求出起切比
,并求出起切比![]()
 ,其中
,其中![]() ,
,![]()
![\beta=\sqrt[m]{\frac{R_{am}}{R_a}}](http://img.e-com-net.com/image/info8/a5e39fa6492d4b8ca2d5291f284e39b3.gif) 并重新选择I1和I2
并重新选择I1和I2![]() ,求出各级电阻
,求出各级电阻
他励直流电动机的调速
他励直流电动机的制动
①能耗制动

![]() 由此可以得到
由此可以得到![]()
![]() 得到
得到![]() (此时T0与TL方向相反)
(此时T0与TL方向相反)②反接制动
![]() 得到范围;
得到范围;![]() 求出特定转速下的Rb
求出特定转速下的Rb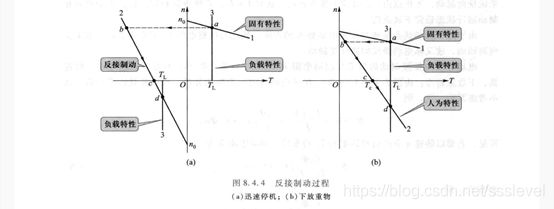
③回馈制动
![]()
第三章(异步电机的基本理论)
三相异步电动机的工作原理
![]() ,在我国工频下,确定了磁极对数就可以得到磁场转速
,在我国工频下,确定了磁极对数就可以得到磁场转速![]()

 (相邻两槽之间的电角度);极距
(相邻两槽之间的电角度);极距![]() (相邻两个磁极之间的槽数);节距
(相邻两个磁极之间的槽数);节距 (一个线圈两圈边之间的槽数);每极每相槽数
(一个线圈两圈边之间的槽数);每极每相槽数![]()

三相异步电机的额定值
![]()
三相异步电机的电动势平衡方程
![]()
![]()
![]() ,其中
,其中![]()
 ,电动势为
,电动势为 可以得到:
可以得到:![]() ,
,![]()
![]() (节距因素*分布因素)
(节距因素*分布因素)![]() ,
,![]()
三相异步电动机的磁通势平衡方程
 .
.![]()
三相异步电机的运行分析:等效电路
![]() ,其中
,其中![]()
![]() ,其中
,其中![]()
![]() ,则
,则![]() ,
,![]()
三相异步电机的功率和转矩
![]()
![]() ,是传递到转子中的功率其中
,是传递到转子中的功率其中![]() ,
,
![]() ,其中
,其中![]()
![]() ,其中空载损耗
,其中空载损耗![]()

![]() ;
;![]()
![]()
第四章(异步电机的电力拖动)
电磁转矩公式
![]()
![]()
![]() ,其中
,其中![]() ,
,![]() ;
;![]() ;/,
;/, ,其中
,其中![]()
三相异步电动机的固有特性
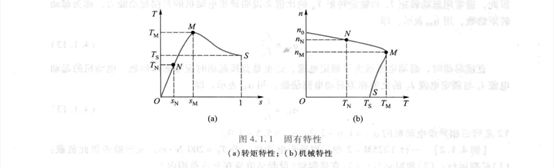
![]() 来说明其短时过载能力
来说明其短时过载能力 来说明其直接启动能力,其中启动电流远大于额定值,
来说明其直接启动能力,其中启动电流远大于额定值,![]() 称为启动电流倍数;
称为启动电流倍数;人为特性


![]() (当遇到外界干扰时,dn减小,dT要大于dTL;dn增大,dT要小于dTL才能恢复 )
(当遇到外界干扰时,dn减小,dT要大于dTL;dn增大,dT要小于dTL才能恢复 )三相异步电机的起动
起动条件
笼型异步电机的起动
![]()
(1)定子串联电阻或电抗减压起动
(2)星形-三角形减压起动

![]()
![]()
(3)自耦变压器减压起动

![]()
![]()
![]()
(4)软起动器起动
绕线型异步电动机串联电阻起动
![]() ,其中
,其中![]()
有级起动:起动步骤
![]() ,切换转矩
,切换转矩![]() 并计算出起切转矩比
并计算出起切转矩比![]()
![]()
![\beta=\sqrt[m]{\frac{T_N}{s_NT_1}}=\sqrt[m]{\frac{R_{2m}}{R_2}}](http://img.e-com-net.com/image/info8/e49125147add49c0a0919f10d1960b2a.gif)
![]()
三相异步电动机的调速
![]()
![]() (电动机由理想空载到满载时的转速差与理想空载转速之百分比)来表示稳定性。
(电动机由理想空载到满载时的转速差与理想空载转速之百分比)来表示稳定性。![]() 有关,硬度越大,转矩变化,转速变化越小,静差率越小,稳定性就越好;
有关,硬度越大,转矩变化,转速变化越小,静差率越小,稳定性就越好;笼型异步电动机的调速
①变频调速
![]() 时,需要使
时,需要使![]() 为常数,原因是f1减小时若
为常数,原因是f1减小时若![]() 不变,则会使磁通增加,容易产生磁饱和,铁损耗增加,功率因素下降;由
不变,则会使磁通增加,容易产生磁饱和,铁损耗增加,功率因素下降;由![]() 可知此时适合于恒转矩负载;
可知此时适合于恒转矩负载;![]() 时,需要保持
时,需要保持![]() 为常数,因为此时f1增加使磁通减小,并且如果增加U1,超过UN这一般不允许;由
为常数,因为此时f1增加使磁通减小,并且如果增加U1,超过UN这一般不允许;由![]() 可知此时适合于恒功率负载;
可知此时适合于恒功率负载;②变极调速
![]() 改变都使得定子绕组磁极对数减少到原来的一半,由
改变都使得定子绕组磁极对数减少到原来的一半,由![]() 得这样变化使转速增加;反过来调则转速下降;
得这样变化使转速增加;反过来调则转速下降;![]() ,适应恒转矩负载调速;对于
,适应恒转矩负载调速;对于![]() 适应恒功率负载调速;
适应恒功率负载调速;③定子降压调速


三相异步电动机的制动
①能耗制动

②反接制动

③回馈制动


![]() 得到定子转速的变化,通过
得到定子转速的变化,通过![]() 得到TM和电压的平方成正比,和频率的平方成反比(其中X2与频率成正比)得到TM变化后的数值,由
得到TM和电压的平方成正比,和频率的平方成反比(其中X2与频率成正比)得到TM变化后的数值,由![]() 得到SM与频率成反比,由此得到SM的变化;而由公式
得到SM与频率成反比,由此得到SM的变化;而由公式![]() 得到R2的数值,最后经过公式
得到R2的数值,最后经过公式![]() (其中T为负载转矩,式子取负号,取正号得到的转速更小,所以先稳定在取负号得到的转速上)
(其中T为负载转矩,式子取负号,取正号得到的转速更小,所以先稳定在取负号得到的转速上)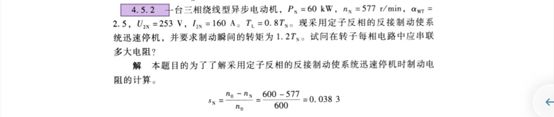

![]() ,通过公式求
,通过公式求![]() 依旧需要知道
依旧需要知道![]() 的变化,还需要知到
的变化,还需要知到![]() 中n0的变化(反向),得到sM后得到Rb;
中n0的变化(反向),得到sM后得到Rb;
![]() ,
,![]() ,
,![]() ,其中
,其中![]() ,
,![]() 其中
其中![]() ,
,![]() ,
,![]()


![]() ,
,![]()





![]()
