033-OpenCV轮廓查找与绘制、孔洞填充、连通域标记
话不多说,上代码,看结果。
import cv2 # 导入库
import numpy as np
from matplotlib import pyplot as plt
'''
cv2.imread(filename,flags)
# filename为文件名,图片与.py文件在一个文件夹时输入文件名即可
# 不在一个文件夹时输入图片的路径和名字
# flags为图片的颜色类型,默认为1,灰度图像为0
'''
img = cv2.imread('20.jpg')
'''
np.copy()
# 数组拷贝,理解成备份原图像就行
# 原图像img, 备份图像img1
# 原图像随便改,备份图像还是初始的原图像
'''
img2 = img.copy()
'''
cv2.cvtColor()
# 颜色空间转换
# img为要转换的图像,后者为转换的格式
# 颜色空间有很多种,最常见的就是RGB颜色空间
# R红色,G绿色,B蓝色,OpenCV中顺序是BGR!!!!!!!
# [255, 0,0]是蓝色,[0, 255, 0]表示绿色,[0, 0, 255]表示红色
HSV颜色空间
# 也挺常用的,H是色调,S是饱和度,V是明度,具体百度就行
'''
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
'''
cv2.namedWindow(winname,flags)
# winname是窗口名字
# flags为窗口显示方式,cv2.WINDOW_NORMAL为正常显示,可以调整大小
# cv2.WINDOW_AUTOSIZE显示原图片的大小,用户不能调整大小
'''
cv2.namedWindow('img', cv2.WINDOW_NORMAL)
'''
cv2.imshow(winname,mat)
# winname为显示的窗口
# mat 需要显示的图像
'''
cv2.imshow('img', img)
'''
cv2.blur(src, ksize, dst, anchor, borderType)
均值滤波
# 用邻域内像素均值来代替该点像素值,均值滤波在去噪的同时也破坏了图像细节部分
# src 要滤波的图像 ksize 内核的大小 anchor 锚点,即要平滑的点,默认值(-1, -1),即在核中心
# ksize(3, 3)表示3 * 3的核大小
# dst 输出图像
# borderType 图像像素边界类型,默认就行
'''
img1 = cv2.blur(img, (3, 3))
'''
cv2.Canny(image, threshold1, threshold2, edges, apertureSize, L2gradient)
# src 输入图像 dst 输出边缘图像
# threshold1: 滞后阈值低阈值(用于边缘连接) threshold2: 滞后阈值高阈值(控制边缘初始段)
# 推荐高低阈值比值在2:1到3:1之间
# apertureSize: 表示Sobel算子孔径大小, 默认值3
# L2gradient: 计算图像梯度幅值的标识
'''
img1 = cv2.Canny(img1, 30, 100)
cv2.namedWindow('img1', cv2.WINDOW_NORMAL)
cv2.imshow('img1', img1)
# 对图片做二值变化
'''
cv2.threshold(src, thresh, maxval, type, dst)
给定阈值,可以过滤灰度值过大或过小的点
# src 要滤波的图像 dst 输出图像
# thresh 给定阈值 咋判断选取的这个数的好坏呢?不停尝试。
# 用Otsu 不停尝试
# 多加一个参数:cv2.THRESH_OTSU,这时要把阈值设为 0。然后算法会找到最优阈值.
# 这个最优阈值就是返回值ret。如果不使用Otsu二值化,返回的retVal 值与设定的阈值相等
# maxval cv2.THRESH_BINARY 二值化阈值,大于阈值的部分被置为255,小于部分被置为0
# cv2.THRESH_BINARY_INV 反向二值化阈值,大于阈值部分被置为0,小于部分被置为255
# cv2.THRESH_TOZERO 大于部分保持不变, 小于阈值部分被置为0
# cv2.THRESH_TOZERO_INV 大于阈值部分被置为0,小于部分保持不变
# cv2.THRESH_TRUNC 截断阈值化,大于阈值部分被置为threshold,小于部分保持原样
'''
ret, thresh = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
'''
cv2.findContours(image, mode, method, contours, hierarchy, offset)
# image 输入图像, 8位单通道图像(一般为二值图)
# contours: 检测到的轮廓, 每个轮廓存储为一个点向量, 即Point类型的vector表示
# hierarchy: 可选的输出向量, 包含图像的拓扑信息。
# 其作为轮廓数量的表示, 包含了许多元素, 每个轮廓contours[i]对应4个hierarchy元素
# hierarchy[i][0]~hierarchy[i][3], 分别表示后一轮廓、前一轮廓、父轮廓、内嵌轮廓的索引编号,
# 如果没有对应项, 设置为负数
# mode: 轮廓检索模式, 取值如下:
# cv2.RETR_EXTERNAL=0-----表示只检测最外层轮廓
# cv2.RETR_LIST=1------提取所有轮廓并放置在list中, 轮廓不建立等级关系
# cv2.RETR_CCOMP=2------提取所有轮廓并组织为双层结构
# cv2.RETR_TREE =3------提取所有轮廓并重新建立网状轮廓结构
# method: 轮廓的近似方法,有两种:
# cv2.CHAIN_APPROX_SIMPLE 压缩存储,对于水平、垂直或斜向的线段,只会保存端点
# cv2.CHAIN_APPROX_NONE 连续存储所有的轮廓点,任何两个相邻的点都是水平、垂直或斜相邻的
# offset: 每个轮廓的可选偏移量, 默认值Point()
'''
thresh, contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE)
'''
cv2.drawContours(image, contours, contourIdx, color, thickness, lineType, hierarchy, maxLevel, offset)
画出图片中的轮廓值,也可以用来画轮廓的近似值
# img 输入的需要画的图片 contours 轮廓值
# -1表示轮廓的索引, (0, 0, 255)表示颜色, 2表示线条粗细
# lineType: 线条类型, 默认值8
# hierarcy: 可选的层次结构信息, 默认值noArray()
# maxLevel: 表示用于绘制轮廓的最大等级, 默认值INT_MAX
# offset: 可选的轮廓偏移参数, 默认值Point()
'''
ret = cv2.drawContours(img2, contours, -1, (0, 0, 255), 2)
'''
cv2.imshow(winname,mat)
# winname为显示的窗口
# mat 需要显示的图像
'''
cv2.imshow('ret', ret)
'''
cv2.waitKey(delay)
# delay为正数时,延时delay毫秒结束
# 想要用按下某个键时退出可用以下方法:
# if(cv2.waitKey(0) == ord('q')):
exit(0)
#别的方法也行,不唯一
'''
if cv2.waitKey(0) & 0xFF == 27:
exit(0)
'''
cv2.destroyWindow(winname)
#结束窗口,winname为窗口名
cv2.destroyAllWindows()
#结束所有窗口
'''
cv2.destroyAllWindows()
结果如下图。
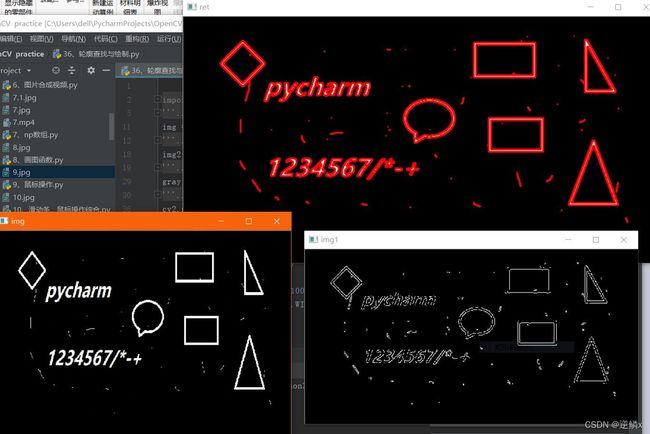
接下来是访问轮廓所有点。
import cv2 # 导入库
import numpy as np
'''
cv2.imread(filename,flags)
# filename为文件名,图片与.py文件在一个文件夹时输入文件名即可
# 不在一个文件夹时输入图片的路径和名字
# flags为图片的颜色类型,默认为1,灰度图像为0
'''
img = cv2.imread("29.jpg") # 读取图片
'''
cv2.imshow(winname,mat)
# winname为显示的窗口
# mat 需要显示的图像
'''
cv2.imshow("src", img) # 显示图片
'''
np.copy()
# 数组拷贝,理解成备份原图像就行
# 原图像img, 备份图像img1
# 原图像随便改,备份图像还是初始的原图像
'''
temp = img.copy()
'''
cv2.cvtColor()
# 颜色空间转换
# img为要转换的图像,后者为转换的格式
# 颜色空间有很多种,最常见的就是RGB颜色空间
# R红色,G绿色,B蓝色,OpenCV中顺序是BGR!!!!!!!
# [255, 0,0]是蓝色,[0, 255, 0]表示绿色,[0, 0, 255]表示红色
HSV颜色空间
# 也挺常用的,H是色调,S是饱和度,V是明度,具体百度就行
'''
gray = cv2.cvtColor(temp, cv2.COLOR_BGR2GRAY)
# 对图片做二值变化
'''
cv2.threshold(src, thresh, maxval, type, dst)
给定阈值,可以过滤灰度值过大或过小的点
# src 要滤波的图像 dst 输出图像
# thresh 给定阈值 咋判断选取的这个数的好坏呢?不停尝试。
# 用Otsu 不停尝试
# 多加一个参数:cv2.THRESH_OTSU,这时要把阈值设为 0。然后算法会找到最优阈值.
# 这个最优阈值就是返回值ret。如果不使用Otsu二值化,返回的retVal 值与设定的阈值相等
# maxval cv2.THRESH_BINARY 二值化阈值,大于阈值的部分被置为255,小于部分被置为0
# cv2.THRESH_BINARY_INV 反向二值化阈值,大于阈值部分被置为0,小于部分被置为255
# cv2.THRESH_TOZERO 大于部分保持不变, 小于阈值部分被置为0
# cv2.THRESH_TOZERO_INV 大于阈值部分被置为0,小于部分保持不变
# cv2.THRESH_TRUNC 截断阈值化,大于阈值部分被置为threshold,小于部分保持原样
'''
ret, thresh = cv2.threshold(gray, 100, 250, cv2.THRESH_BINARY)
'''
cv2.findContours(image, mode, method, contours, hierarchy, offset)
# image 输入图像, 8位单通道图像(一般为二值图)
# contours: 检测到的轮廓, 每个轮廓存储为一个点向量, 即Point类型的vector表示
# hierarchy: 可选的输出向量, 包含图像的拓扑信息。
# 其作为轮廓数量的表示, 包含了许多元素, 每个轮廓contours[i]对应4个hierarchy元素
# hierarchy[i][0]~hierarchy[i][3], 分别表示后一轮廓、前一轮廓、父轮廓、内嵌轮廓的索引编号,
# 如果没有对应项, 设置为负数
# mode: 轮廓检索模式, 取值如下:
# cv2.RETR_EXTERNAL=0-----表示只检测最外层轮廓
# cv2.RETR_LIST=1------提取所有轮廓并放置在list中, 轮廓不建立等级关系
# cv2.RETR_CCOMP=2------提取所有轮廓并组织为双层结构
# cv2.RETR_TREE =3------提取所有轮廓并重新建立网状轮廓结构
# method: 轮廓的近似方法,有两种:
# cv2.CHAIN_APPROX_SIMPLE 压缩存储,对于水平、垂直或斜向的线段,只会保存端点
# cv2.CHAIN_APPROX_NONE 连续存储所有的轮廓点,任何两个相邻的点都是水平、垂直或斜相邻的
# offset: 每个轮廓的可选偏移量, 默认值Point()
'''
thresh, contours, hierarchy = cv2.findContours(thresh, cv2.RETR_CCOMP, cv2.CHAIN_APPROX_NONE)
ptStart = (10, 10) # 定义起始点
flag = 0
for i in range(0, len(contours)):
for j in range(0, len(contours[i])):
if j % 20 == 0:
ptEnd = (contours[i][j][0][0], contours[i][j][0][1])
cv2.line(img, ptStart, ptEnd, (0, 0, 255), 1, cv2.LINE_AA)
cv2.circle(img, ptEnd, 3, (0, 255, 0), 1, cv2.LINE_AA)
cv2.imshow("img", img) # 显示图片
'''
cv2.waitKey(delay)
# delay为正数时,延时delay毫秒结束
# 想要用按下某个键时退出可用以下方法:
# if(cv2.waitKey(0) == ord('q')):
exit(0)
#别的方法也行,不唯一
'''
if cv2.waitKey(2) & 0xFF == 27:
flag = 1
break
if flag:
break
'''
cv2.destroyWindow(winname)
#结束窗口,winname为窗口名
cv2.destroyAllWindows()
#结束所有窗口
'''
cv2.destroyAllWindows()
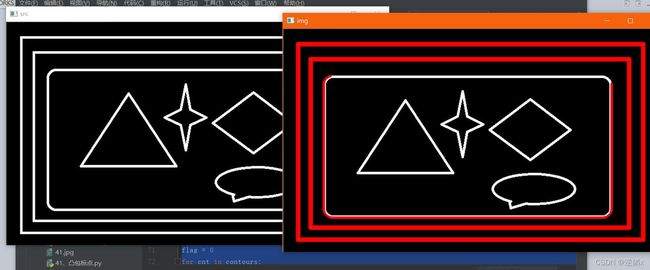
结果如下图。

接下来是访问每一个轮廓。
import cv2 # 导入库
import numpy as np
'''
cv2.imread(filename,flags)
# filename为文件名,图片与.py文件在一个文件夹时输入文件名即可
# 不在一个文件夹时输入图片的路径和名字
# flags为图片的颜色类型,默认为1,灰度图像为0
'''
img = cv2.imread("34.jpg") # 读取图片
'''
cv2.imshow(winname,mat)
# winname为显示的窗口
# mat 需要显示的图像
'''
cv2.imshow("src", img) # 显示图片
'''
np.copy()
# 数组拷贝,理解成备份原图像就行
# 原图像img, 备份图像img1
# 原图像随便改,备份图像还是初始的原图像
'''
temp = img.copy()
'''
cv2.cvtColor()
# 颜色空间转换
# img为要转换的图像,后者为转换的格式
# 颜色空间有很多种,最常见的就是RGB颜色空间
# R红色,G绿色,B蓝色,OpenCV中顺序是BGR!!!!!!!
# [255, 0,0]是蓝色,[0, 255, 0]表示绿色,[0, 0, 255]表示红色
HSV颜色空间
# 也挺常用的,H是色调,S是饱和度,V是明度,具体百度就行
'''
gray = cv2.cvtColor(temp, cv2.COLOR_BGR2GRAY)
# 对图片做二值变化
'''
cv2.threshold(src, thresh, maxval, type, dst)
给定阈值,可以过滤灰度值过大或过小的点
# src 要滤波的图像 dst 输出图像
# thresh 给定阈值 咋判断选取的这个数的好坏呢?不停尝试。
# 用Otsu 不停尝试
# 多加一个参数:cv2.THRESH_OTSU,这时要把阈值设为 0。然后算法会找到最优阈值.
# 这个最优阈值就是返回值ret。如果不使用Otsu二值化,返回的retVal 值与设定的阈值相等
# maxval cv2.THRESH_BINARY 二值化阈值,大于阈值的部分被置为255,小于部分被置为0
# cv2.THRESH_BINARY_INV 反向二值化阈值,大于阈值部分被置为0,小于部分被置为255
# cv2.THRESH_TOZERO 大于部分保持不变, 小于阈值部分被置为0
# cv2.THRESH_TOZERO_INV 大于阈值部分被置为0,小于部分保持不变
# cv2.THRESH_TRUNC 截断阈值化,大于阈值部分被置为threshold,小于部分保持原样
'''
ret, thresh = cv2.threshold(gray, 100, 250, cv2.THRESH_BINARY)
'''
cv2.findContours(image, mode, method, contours, hierarchy, offset)
# image 输入图像, 8位单通道图像(一般为二值图)
# contours: 检测到的轮廓, 每个轮廓存储为一个点向量, 即Point类型的vector表示
# hierarchy: 可选的输出向量, 包含图像的拓扑信息。
# 其作为轮廓数量的表示, 包含了许多元素, 每个轮廓contours[i]对应4个hierarchy元素
# hierarchy[i][0]~hierarchy[i][3], 分别表示后一轮廓、前一轮廓、父轮廓、内嵌轮廓的索引编号,
# 如果没有对应项, 设置为负数
# mode: 轮廓检索模式, 取值如下:
# cv2.RETR_EXTERNAL=0-----表示只检测最外层轮廓
# cv2.RETR_LIST=1------提取所有轮廓并放置在list中, 轮廓不建立等级关系
# cv2.RETR_CCOMP=2------提取所有轮廓并组织为双层结构
# cv2.RETR_TREE =3------提取所有轮廓并重新建立网状轮廓结构
# method: 轮廓的近似方法,有两种:
# cv2.CHAIN_APPROX_SIMPLE 压缩存储,对于水平、垂直或斜向的线段,只会保存端点
# cv2.CHAIN_APPROX_NONE 连续存储所有的轮廓点,任何两个相邻的点都是水平、垂直或斜相邻的
# offset: 每个轮廓的可选偏移量, 默认值Point()
'''
thresh, contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE)
flag = 0
for cnt in contours:
for j in range(0, len(cnt)):
'''
cv2.drawContours(image, contours, contourIdx, color, thickness, lineType, hierarchy, maxLevel, offset)
画出图片中的轮廓值,也可以用来画轮廓的近似值
# img 输入的需要画的图片 contours 轮廓值
# -1表示轮廓的索引, (0, 0, 255)表示颜色, 2表示线条粗细
# lineType: 线条类型, 默认值8
# hierarcy: 可选的层次结构信息, 默认值noArray()
# maxLevel: 表示用于绘制轮廓的最大等级, 默认值INT_MAX
# offset: 可选的轮廓偏移参数, 默认值Point()
'''
cv2.drawContours(img, cnt, j, (0, 0, 255), 3)
cv2.imshow("img", img) # 显示图片
'''
cv2.waitKey(delay)
# delay为正数时,延时delay毫秒结束
# 想要用按下某个键时退出可用以下方法:
# if(cv2.waitKey(0) == ord('q')):
exit(0)
#别的方法也行,不唯一
'''
if cv2.waitKey(5) & 0xFF == 27:
flag = 1
break
if flag:
break
'''
cv2.destroyWindow(winname)
#结束窗口,winname为窗口名
cv2.destroyAllWindows()
#结束所有窗口
'''
cv2.destroyAllWindows()
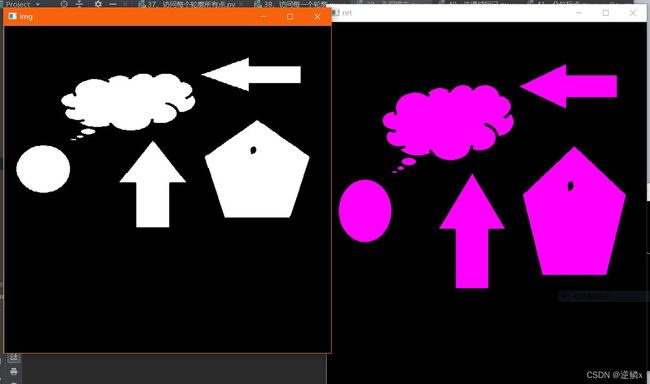
结果如下图。
接下来是孔洞填充。
import cv2 # 导入库
import numpy as np
from matplotlib import pyplot as plt
'''
cv2.imread(filename,flags)
# filename为文件名,图片与.py文件在一个文件夹时输入文件名即可
# 不在一个文件夹时输入图片的路径和名字
# flags为图片的颜色类型,默认为1,灰度图像为0
'''
img = cv2.imread('74.jpg')
'''
np.copy()
# 数组拷贝,理解成备份原图像就行
# 原图像img, 备份图像img1
# 原图像随便改,备份图像还是初始的原图像
'''
img2 = img.copy()
'''
cv2.cvtColor()
# 颜色空间转换
# img为要转换的图像,后者为转换的格式
# 颜色空间有很多种,最常见的就是RGB颜色空间
# R红色,G绿色,B蓝色,OpenCV中顺序是BGR!!!!!!!
# [255, 0,0]是蓝色,[0, 255, 0]表示绿色,[0, 0, 255]表示红色
HSV颜色空间
# 也挺常用的,H是色调,S是饱和度,V是明度,具体百度就行
'''
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
'''
cv2.namedWindow(winname,flags)
# winname是窗口名字
# flags为窗口显示方式,cv2.WINDOW_NORMAL为正常显示,可以调整大小
# cv2.WINDOW_AUTOSIZE显示原图片的大小,用户不能调整大小
'''
cv2.namedWindow('img', cv2.WINDOW_NORMAL)
'''
cv2.imshow(winname,mat)
# winname为显示的窗口
# mat 需要显示的图像
'''
cv2.imshow('img', img)
'''
cv2.blur(src, ksize, dst, anchor, borderType)
均值滤波
# 用邻域内像素均值来代替该点像素值,均值滤波在去噪的同时也破坏了图像细节部分
# src 要滤波的图像 ksize 内核的大小 anchor 锚点,即要平滑的点,默认值(-1, -1),即在核中心
# ksize(3, 3)表示3 * 3的核大小
# dst 输出图像
# borderType 图像像素边界类型,默认就行
'''
img1 = cv2.blur(img, (3, 3))
'''
cv2.Canny(image, threshold1, threshold2, edges, apertureSize, L2gradient)
# src 输入图像 dst 输出边缘图像
# threshold1: 滞后阈值低阈值(用于边缘连接) threshold2: 滞后阈值高阈值(控制边缘初始段)
# 推荐高低阈值比值在2:1到3:1之间
# apertureSize: 表示Sobel算子孔径大小, 默认值3
# L2gradient: 计算图像梯度幅值的标识
'''
img1 = cv2.Canny(img1, 30, 100)
cv2.namedWindow('img1', cv2.WINDOW_NORMAL)
cv2.imshow('img1', img1)
# 对图片做二值变化
'''
cv2.threshold(src, thresh, maxval, type, dst)
给定阈值,可以过滤灰度值过大或过小的点
# src 要滤波的图像 dst 输出图像
# thresh 给定阈值 咋判断选取的这个数的好坏呢?不停尝试。
# 用Otsu 不停尝试
# 多加一个参数:cv2.THRESH_OTSU,这时要把阈值设为 0。然后算法会找到最优阈值.
# 这个最优阈值就是返回值ret。如果不使用Otsu二值化,返回的retVal 值与设定的阈值相等
# maxval cv2.THRESH_BINARY 二值化阈值,大于阈值的部分被置为255,小于部分被置为0
# cv2.THRESH_BINARY_INV 反向二值化阈值,大于阈值部分被置为0,小于部分被置为255
# cv2.THRESH_TOZERO 大于部分保持不变, 小于阈值部分被置为0
# cv2.THRESH_TOZERO_INV 大于阈值部分被置为0,小于部分保持不变
# cv2.THRESH_TRUNC 截断阈值化,大于阈值部分被置为threshold,小于部分保持原样
'''
ret, thresh = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
'''
cv2.findContours(image, mode, method, contours, hierarchy, offset)
# image 输入图像, 8位单通道图像(一般为二值图)
# contours: 检测到的轮廓, 每个轮廓存储为一个点向量, 即Point类型的vector表示
# hierarchy: 可选的输出向量, 包含图像的拓扑信息。
# 其作为轮廓数量的表示, 包含了许多元素, 每个轮廓contours[i]对应4个hierarchy元素
# hierarchy[i][0]~hierarchy[i][3], 分别表示后一轮廓、前一轮廓、父轮廓、内嵌轮廓的索引编号,
# 如果没有对应项, 设置为负数
# mode: 轮廓检索模式, 取值如下:
# cv2.RETR_EXTERNAL=0-----表示只检测最外层轮廓
# cv2.RETR_LIST=1------提取所有轮廓并放置在list中, 轮廓不建立等级关系
# cv2.RETR_CCOMP=2------提取所有轮廓并组织为双层结构
# cv2.RETR_TREE =3------提取所有轮廓并重新建立网状轮廓结构
# method: 轮廓的近似方法,有两种:
# cv2.CHAIN_APPROX_SIMPLE 压缩存储,对于水平、垂直或斜向的线段,只会保存端点
# cv2.CHAIN_APPROX_NONE 连续存储所有的轮廓点,任何两个相邻的点都是水平、垂直或斜相邻的
# offset: 每个轮廓的可选偏移量, 默认值Point()
'''
thresh, contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE)
'''
cv2.drawContours(image, contours, contourIdx, color, thickness, lineType, hierarchy, maxLevel, offset)
画出图片中的轮廓值,也可以用来画轮廓的近似值
# img 输入的需要画的图片 contours 轮廓值
# -1表示轮廓的索引, (0, 0, 255)表示颜色, 2表示线条粗细
# lineType: 线条类型, 默认值8
# hierarcy: 可选的层次结构信息, 默认值noArray()
# maxLevel: 表示用于绘制轮廓的最大等级, 默认值INT_MAX
# offset: 可选的轮廓偏移参数, 默认值Point()
'''
ret = cv2.drawContours(img2, contours, -1, (255, 0, 255), -1)
'''
cv2.imshow(winname,mat)
# winname为显示的窗口
# mat 需要显示的图像
'''
cv2.imshow('ret', ret)
'''
cv2.waitKey(delay)
# delay为正数时,延时delay毫秒结束
# 想要用按下某个键时退出可用以下方法:
# if(cv2.waitKey(0) == ord('q')):
exit(0)
#别的方法也行,不唯一
'''
if cv2.waitKey(0) & 0xFF == 27:
exit(0)
'''
cv2.destroyWindow(winname)
#结束窗口,winname为窗口名
cv2.destroyAllWindows()
#结束所有窗口
'''
cv2.destroyAllWindows()
结果如下图。
接下来是连通域标记。
import cv2
import random
'''
cv2.imread(filename,flags)
# filename为文件名,图片与.py文件在一个文件夹时输入文件名即可
# 不在一个文件夹时输入图片的路径和名字
# flags为图片的颜色类型,默认为1,灰度图像为0
'''
img = cv2.imread('74.jpg')
'''
np.copy()
# 数组拷贝,理解成备份原图像就行
# 原图像img, 备份图像img1
# 原图像随便改,备份图像还是初始的原图像
'''
temp = img.copy()
'''
cv2.cvtColor()
# 颜色空间转换
# img为要转换的图像,后者为转换的格式
# 颜色空间有很多种,最常见的就是RGB颜色空间
# R红色,G绿色,B蓝色,OpenCV中顺序是BGR!!!!!!!
# [255, 0,0]是蓝色,[0, 255, 0]表示绿色,[0, 0, 255]表示红色
HSV颜色空间
# 也挺常用的,H是色调,S是饱和度,V是明度,具体百度就行
'''
gray = cv2.cvtColor(temp, cv2.COLOR_BGR2GRAY)
'''
cv2.GaussianBlur(src,ksize, sigmaX, dst, sigmaY, borderType)
高斯滤波
# src 要滤波的图像 dst 输出图像
# ksize(x,y)表示内核大小,x,y可以不同,但是必须为正奇数或者0, 由sigma计算得来
# sigmaX: 表示高斯函数在X方向上的标准偏差
# sigmaY: 表示高斯函数在Y方向上的标准偏差
# 若sigmaY=0, 就将它设置为sigmaX;
# 若sigmaY、sigmaX=0,则由ksize.x和ksize.y计算出来
# borderType 图像像素边界类型,默认就行
'''
gray = cv2.GaussianBlur(gray, (3, 3), 0)
'''
cv2.namedWindow(winname,flags)
# winname是窗口名字
# flags为窗口显示方式,cv2.WINDOW_NORMAL为正常显示,可以调整大小
# cv2.WINDOW_AUTOSIZE显示原图片的大小,用户不能调整大小
'''
cv2.namedWindow('src', cv2.WINDOW_NORMAL)
'''
cv2.imshow(winname,mat)
# winname为显示的窗口
# mat 需要显示的图像
'''
cv2.imshow('src', img)
'''
cv2.dilate(src, kerenl, dst, anchor, iterations, borderType, borderValue)
膨胀
# src 要膨胀的图像 dst 输出图像
# kerenl 膨胀操作的核, 当为NULL时, 表示使用参考点位于中心的3x3的核
# 一般使用cv2.getStructuringElement获得指定形状和尺寸的结构元素(核)
# kernel = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (3, 3)) # 椭圆结构
# kernel = cv2.getStructuringElement(cv2.MORPH_CROSS, (3, 3)) # 十字结构
# kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (3, 3)) # 矩形结构
# anchor 锚的位置, 默认值Point(-1,-1), 表示位于中心
# interations: 膨胀的次数
# borderType: 边界模式, 一般采用默认值
# borderValue: 边界值, 一般采用默认值
'''
kernel = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (9, 9)) # 椭圆结构
kernel1 = cv2.getStructuringElement(cv2.MORPH_RECT, (3, 3)) # 矩形结构
gray = cv2.dilate(gray, kernel, iterations=1)
'''
cv2.dilate(src, kerenl, dst, anchor, iterations, borderType, borderValue)
膨胀
# src 要膨胀的图像 dst 输出图像
# kerenl 膨胀操作的核, 当为NULL时, 表示使用参考点位于中心的3x3的核
# 一般使用cv2.getStructuringElement获得指定形状和尺寸的结构元素(核)
# kernel = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (3, 3)) # 椭圆结构
# kernel = cv2.getStructuringElement(cv2.MORPH_CROSS, (3, 3)) # 十字结构
# kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (3, 3)) # 矩形结构
# anchor 锚的位置, 默认值Point(-1,-1), 表示位于中心
# interations: 膨胀的次数
# borderType: 边界模式, 一般采用默认值
# borderValue: 边界值, 一般采用默认值
'''
gray = cv2.erode(gray, kernel1, iterations=1)
# 先膨胀后腐蚀,用闭运算即可
'''
cv2.morphologyEx(src, op, kernel, dst, anchor, iterations, borderType, borderValue)
# src 要开运算的图像 dst 输出图像
# op 表示形态学运算的类型, 可以取如下值
# cv2.MORPH_OPEN 先腐蚀后膨胀的过程。开运算可以用来消除小黑点,在纤细点处分离物体、平滑较大物体的边界的 同时并不明显改变其面积。
# cv2.MORPH_CLOSE 先膨胀后腐蚀的过程。闭运算可以用来排除小黑洞。
# cv2.MORPH_GRADIENT 形态学梯度是膨胀图与腐蚀图之差, 对二值图可以将团块(blob)边缘凸显出来, 可以用其来保留边缘轮廓。
# cv2.MORPH_TOPHAT 顶帽(top-hat):将突出比原轮廓亮的部分。
# cv2.MORPH_BLACKHAT 将突出比原轮廓暗的部分。
# kerenl 腐蚀操作的核, 当为NULL时, 表示使用参考点位于中心的3x3的核
# 一般使用cv2.getStructuringElement获得指定形状和尺寸的结构元素(核)
# kernel = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (3, 3)) # 椭圆结构
# kernel = cv2.getStructuringElement(cv2.MORPH_CROSS, (3, 3)) # 十字结构
# kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (3, 3)) # 矩形结构
# kernel = NULL时, 表示使用参考点位于中心的3x3的核
# anchor 锚的位置, 默认值Point(-1,-1), 表示位于中心
# interations: 开运算的次数
# borderType: 边界模式, 一般采用默认值
# borderValue: 边界值, 一般采用默认值
'''
# gray = cv2.morphologyEx(gray, cv2.MORPH_CLOSE, kernel, iterations=
'''
cv2.threshold(src, thresh, maxval, type, dst)
给定阈值,可以过滤灰度值过大或过小的点
# src 要滤波的图像 dst 输出图像
# thresh 给定阈值 咋判断选取的这个数的好坏呢?不停尝试。
# 用Otsu 不停尝试
# 多加一个参数:cv2.THRESH_OTSU,这时要把阈值设为 0。然后算法会找到最优阈值.
# 这个最优阈值就是返回值ret。如果不使用Otsu二值化,返回的retVal 值与设定的阈值相等
# maxval cv2.THRESH_BINARY 二值化阈值,大于阈值的部分被置为255,小于部分被置为0
# cv2.THRESH_BINARY_INV 反向二值化阈值,大于阈值部分被置为0,小于部分被置为255
# cv2.THRESH_TOZERO 大于部分保持不变, 小于阈值部分被置为0
# cv2.THRESH_TOZERO_INV 大于阈值部分被置为0,小于部分保持不变
# cv2.THRESH_TRUNC 截断阈值化,大于阈值部分被置为threshold,小于部分保持原样
'''
ret, thresh = cv2.threshold(gray, 150, 250, cv2.THRESH_BINARY)
'''
cv2.findContours(image, mode, method, contours, hierarchy, offset)
# image 输入图像, 8位单通道图像(一般为二值图)
# contours: 检测到的轮廓, 每个轮廓存储为一个点向量, 即Point类型的vector表示
# hierarchy: 可选的输出向量, 包含图像的拓扑信息。
# 其作为轮廓数量的表示, 包含了许多元素, 每个轮廓contours[i]对应4个hierarchy元素
# hierarchy[i][0]~hierarchy[i][3], 分别表示后一轮廓、前一轮廓、父轮廓、内嵌轮廓的索引编号,
# 如果没有对应项, 设置为负数
# mode: 轮廓检索模式, 取值如下:
# cv2.RETR_EXTERNAL=0-----表示只检测最外层轮廓
# cv2.RETR_LIST=1------提取所有轮廓并放置在list中, 轮廓不建立等级关系
# cv2.RETR_CCOMP=2------提取所有轮廓并组织为双层结构
# cv2.RETR_TREE =3------提取所有轮廓并重新建立网状轮廓结构
# method: 轮廓的近似方法,有两种:
# cv2.CHAIN_APPROX_SIMPLE 压缩存储,对于水平、垂直或斜向的线段,只会保存端点
# cv2.CHAIN_APPROX_NONE 连续存储所有的轮廓点,任何两个相邻的点都是水平、垂直或斜相邻的
# offset: 每个轮廓的可选偏移量, 默认值Point()
'''
thresh, contours, hierarchy = cv2.findContours(thresh, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)
# contours: 检测到的轮廓, 每个轮廓存储为一个点向量
'''
cv2.drawContours(image, contours, contourIdx, color, thickness, lineType, hierarchy, maxLevel, offset)
ret = cv2.drawContours(img2, contours, -1, (0, 0, 255), 2)
画出图片中的轮廓值,也可以用来画轮廓的近似值
# img 输入的需要画的图片 contours 轮廓值
# -1表示轮廓的索引, (0, 0, 255)表示颜色, 2表示线条粗细
# lineType: 线条类型, 默认值8
# hierarcy: 可选的层次结构信息, 默认值noArray()
# maxLevel: 表示用于绘制轮廓的最大等级, 默认值INT_MAX
# offset: 可选的轮廓偏移参数, 默认值Point()
'''
for i in range(0, len(contours)):
cv2.drawContours(img, contours, i, (random.randint(0, 255), random.randint(0, 255), random.randint(0, 255)), -1)
cv2.imshow('contours', img)
'''
cv2.waitKey(delay)
# delay为正数时,延时delay毫秒结束
# 想要用按下某个键时退出可用以下方法:
# if(cv2.waitKey(0) == ord('q')):
exit(0)
#别的方法也行,不唯一
'''
if cv2.waitKey(0) & 0xFF == 27:
exit(0)
'''
cv2.destroyWindow(winname)
#结束窗口,winname为窗口名
cv2.destroyAllWindows()
#结束所有窗口
'''
cv2.destroyAllWindows()
结果如下图。
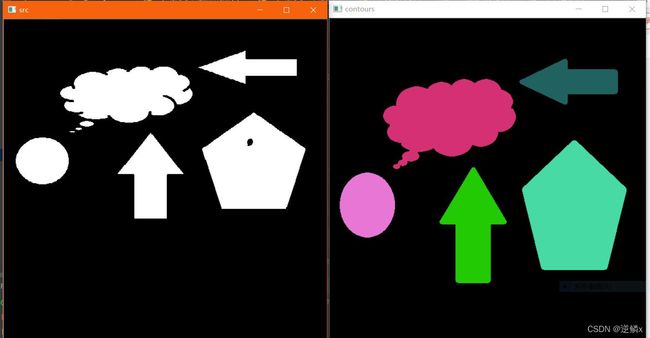

可见膨胀腐蚀的核调整适当的话,不同的区域会被连接在一起,用相同颜色标记出来。