GTSAM中imu预积分及其因子图优化过程
前言
使用IMU和llidar或者相机进行多传感器融合的slam方案中,主要分为紧耦合和松耦合方案。目前,主流的方案都是紧耦合的。而紧耦合方案中主要分为基于滤波(比如,ESKF)和基于优化的方案。
本文则介绍基于优化方案中IMU的预积分理论以及其在GTSAM中的实现。
IMU预积分理论:
简介
IMU的使用一般是对其测得的加速度,角速度进行积分,从而推算出机器人的位姿。但是,由于积分关系,IMU的积分所得的位姿飘移会随着积分时间的增大而增大。另一方面,当优化方法优化了历史时刻的位姿之后,之后时刻的IMU积分值需要重新进行积分,计算量大。因此,IMU预积分就被提出,以解决以上问题。IMU预积分简单来说就是描述了lidar帧(或者相机帧)之间(时间间隔比较短,比如lidar帧间间隔通常为100ms),IMU数据的观测量。其只跟上一帧时刻的IMU状态量相关,因此,在进行优化过程中,计算量较小。作为观测量,IMU预积分自然是作为一个约束用于slam位姿优化。
公式推导
IMU模型:

其中, w b w^b wb是IMU坐标系中角速度的真实值。 a w a^w aw是世界坐标系中加速度真实值。 b g b^g bg, b a b^a ba为IMU偏置,用随机游走建模。 n g n^g ng, n a n^a na为测量值的噪声。 a ~ b \widetilde{a}^b a b, w ~ b \widetilde{w}^b w b为IMU测量值。
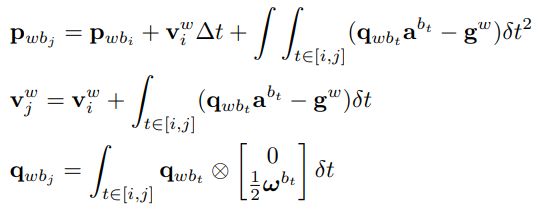
根据积分关系,可以得到位置,速度和姿态的迭代公式。
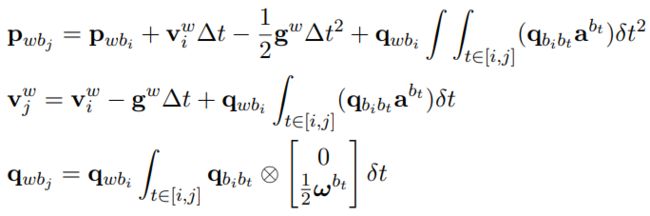
又因为
![]()
那么,PVQ积分公式中的积分项则变为相对于第i时刻的姿态,而不是相对于世界坐标系的姿态:
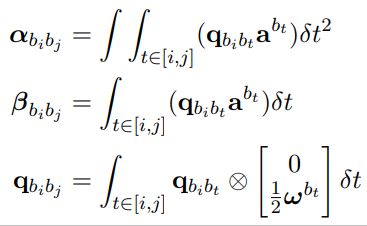
进而定义预积分量:
移项整理,构建残差:

此时,获得了优化过程中需要的残差,残差对相应的状态量求导可得雅可比矩阵。但是,缺少了优化过程需要的协方差矩阵。因此,需要推导出imu噪声协方差和预积分协方差的关系。
根据预积分的定义,使用中值积分方法对其进行离散化,可得:
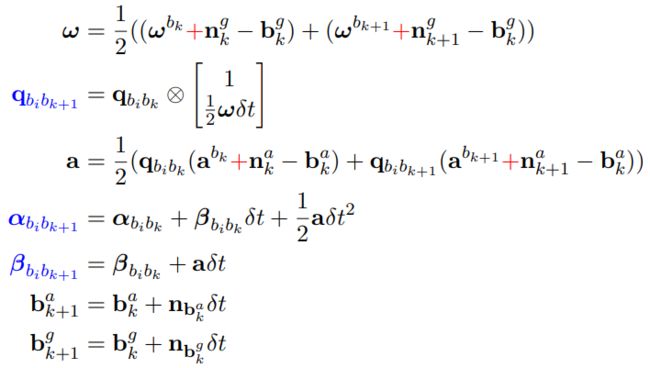
根据上式可以发现,预积分量和imu测量值之间是非线性关系,直接通过该方程求得协方差传播不现实,需要进行线性化。
根据EKF的线性化过程,对上述方程进行一阶泰勒展开,可得:

其中,F,G分别是方程 f ( x k − 1 , u k − 1 ) f(x_{k-1},u_{k-1}) f(xk−1,uk−1)在 x ^ k − 1 \hat{x}_{k-1} x^k−1,噪声项为0处的雅可比矩阵。
由于误差量的协方差矩阵和原随机变量的协方差矩阵相同。因此,预积分量的协方差矩阵可以通过F,G雅可比矩阵进行传播。
GTSAM中IMU预积分实现及其因子图构建
简介
gtsam是通过因子图这个模型实现优化的。因此,在使用gtsam解决一个优化问题时,就需要构建相应的因子图。
在因子图中,图的节点就是待优化的变量,因子就是相应的观测约束。而节点的值(初始值)需要一个类Value来保存。
gtsam优化过程简单描述就是优化方法(比如,GN,ISAM)调用因子图以及相应图节点的值,计算因子(观测约束)的残差,因子(观测约束)对相关图节点(相关量)的雅可比,完成迭代优化。
因此,gtsam中因子的类(比如,ImuFactor)会有相应的求取残差以及雅可比的函数(比如,linearize()函数,这个函数会被重载)。
IMU预积分类
gtsam中的一种IMU预积分实现类是PreintegratedImuMeasurements。其中,
void PreintegrationBase::integrateMeasurement(const Vector3& measuredAcc,
const Vector3& measuredOmega, double dt) {
Matrix9 A;
Matrix93 B, C;
update(measuredAcc, measuredOmega, dt, &A, &B, &C);
}
这个成员函数,接受IMU的加速度,角速度测量值以及imu测量值之间的时间间隔。然后,计算相应的预积分量和噪声传播的雅克比矩阵。
NavState PreintegrationBase::predict(const NavState& state_i,
const imuBias::ConstantBias& bias_i, OptionalJacobian<9, 9> H1,
OptionalJacobian<9, 6> H2) const {
Matrix96 D_biasCorrected_bias;
Vector9 biasCorrected = biasCorrectedDelta(bias_i,
H2 ? &D_biasCorrected_bias : nullptr);
Matrix9 D_delta_state, D_delta_biasCorrected;
Vector9 xi = state_i.correctPIM(biasCorrected, deltaTij_, p().n_gravity,
p().omegaCoriolis, p().use2ndOrderCoriolis, H1 ? &D_delta_state : nullptr,
H2 ? &D_delta_biasCorrected : nullptr);
Matrix9 D_predict_state, D_predict_delta;
NavState state_j = state_i.retract(xi,
H1 ? &D_predict_state : nullptr,
H2 || H2 ? &D_predict_delta : nullptr);
if (H1)
*H1 = D_predict_state + D_predict_delta * D_delta_state;
if (H2)
*H2 = D_predict_delta * D_delta_biasCorrected * D_biasCorrected_bias;
return state_j;
}
这个成员函数根据预积分量以及输入的PVQ,Bias进行当前时刻imu积分值计算。计算得到的结果可以作为相应节点的初始值。
gtsam因子图构建
NonlinearFactorGraph* graph = new NonlinearFactorGraph();
graph->addPrior(X(correction_count), prior_pose, pose_noise_model);
graph->addPrior(V(correction_count), prior_velocity, velocity_noise_model);
graph->addPrior(B(correction_count), prior_imu_bias, bias_noise_model);
先实例化因子图对象,而后加入先验节点。
std::shared_ptr<PreintegrationType> preintegrated =
std::make_shared<PreintegratedImuMeasurements>(p, prior_imu_bias);
创建imu预积分对象。
// Adding the IMU preintegration.
preintegrated->integrateMeasurement(imu.head<3>(), imu.tail<3>(), dt);
根据imu观测值的输入,进行imu预积分计算。直到获得位姿观测值。
auto preint_imu =
dynamic_cast<const PreintegratedImuMeasurements&>(*preintegrated);
ImuFactor imu_factor(X(correction_count - 1), V(correction_count - 1),
X(correction_count), V(correction_count),
B(correction_count - 1), preint_imu);
graph->add(imu_factor);
imuBias::ConstantBias zero_bias(Vector3(0, 0, 0), Vector3(0, 0, 0));
graph->add(BetweenFactor<imuBias::ConstantBias>(
B(correction_count - 1), B(correction_count), zero_bias,
bias_noise_model));
当获得位姿观测值(比如,GPS数据,lidar匹配的位姿等)时,就利用imu预积分对象构建imu因子。
auto correction_noise = noiseModel::Isotropic::Sigma(3, 1.0);
GPSFactor gps_factor(X(correction_count),
Point3(gps(0), // N,
gps(1), // E,
gps(2)), // D,
correction_noise);
graph->add(gps_factor);
同时,利用位姿观测值构建相应的因子。
至此,构建的因子图,如下所示:

其中,X节点是位姿,V节点是速度,B节点是bias。
然后,创建优化方法类对象,使用构建的因子图和初始值进行迭代优化。
LevenbergMarquardtOptimizer optimizer(*graph, initial_values);
result = optimizer.optimize();
GTSAM因子图优化源码实现:
gtsam中NonlinearConjugateGradientOptimizer这个优化器的optimize()源码如下所示:
const Values& NonlinearConjugateGradientOptimizer::optimize() {
System system(graph_);
Values newValues;
int iterations;
boost::tie(newValues, iterations) =
nonlinearConjugateGradient(system, state_->values, params_, false);
state_.reset(new State(std::move(newValues), graph_.error(newValues), iterations));
return state_->values;
}
其中,nonlinearConjugateGradient函数就是调用因子图中的因子类对象,计算残差和相应的雅可比矩阵。然后,使用该优化器的优化算法进行节点变量优化。具体说明雅可比矩阵的实现过程。
static VectorValues gradientInPlace(const NonlinearFactorGraph &nfg,
const Values &values) {
// Linearize graph
GaussianFactorGraph::shared_ptr linear = nfg.linearize(values);
return linear->gradientAtZero();
}
其中,主要是因子图对象调用linearize()函数。linearize()函数部分源码如下所示:
GaussianFactorGraph::shared_ptr NonlinearFactorGraph::linearize(const Values& linearizationPoint) const
{
gttic(NonlinearFactorGraph_linearize);
// create an empty linear FG
GaussianFactorGraph::shared_ptr linearFG = boost::make_shared<GaussianFactorGraph>();
#ifdef GTSAM_USE_TBB
linearFG->resize(size());
TbbOpenMPMixedScope threadLimiter; // Limits OpenMP threads since we're mixing TBB and OpenMP
// First linearize all sendable factors
tbb::parallel_for(tbb::blocked_range<size_t>(0, size()),
_LinearizeOneFactor(*this, linearizationPoint, *linearFG));
// Linearize all non-sendable factors
for(size_t i = 0; i < size(); i++) {
auto& factor = (*this)[i];
if(factor && !(factor->sendable())) {
(*linearFG)[i] = factor->linearize(linearizationPoint);
}
}
return linearFG;
}
其中,有使用tbb多线程,访问因子图中的因子,调用因子对象中的linearize()函数。而对于ImuFactor这个因子对象,由于其是NoiseModelFactor的子类。因此,调用了NoiseModelFactor的linearize()函数,其源码如下所示:
boost::shared_ptr<GaussianFactor> NoiseModelFactor::linearize(
const Values& x) const {
// Only linearize if the factor is active
if (!active(x))
return boost::shared_ptr<JacobianFactor>();
// Call evaluate error to get Jacobians and RHS vector b
std::vector<Matrix> A(size());
Vector b = -unwhitenedError(x, A);
check(noiseModel_, b.size());
// Whiten the corresponding system now
if (noiseModel_)
noiseModel_->WhitenSystem(A, b);
// Fill in terms, needed to create JacobianFactor below
std::vector<std::pair<Key, Matrix> > terms(size());
for (size_t j = 0; j < size(); ++j) {
terms[j].first = keys()[j];
terms[j].second.swap(A[j]);
}
// TODO pass unwhitened + noise model to Gaussian factor
using noiseModel::Constrained;
if (noiseModel_ && noiseModel_->isConstrained())
return GaussianFactor::shared_ptr(
new JacobianFactor(terms, b,
boost::static_pointer_cast<Constrained>(noiseModel_)->unit()));
else
return GaussianFactor::shared_ptr(new JacobianFactor(terms, b));
}
而其中的unwhitenedError函数,则是计算残差和雅可比矩阵的函数,该函数最终调用imu预积分类PreintegratedImuMeasurements中的残差计算,雅可比矩阵求导函数computeErrorAndJacobians。
 至此,摸索清楚了从优化器到残差,雅可比矩阵计算的整个计算流程。
至此,摸索清楚了从优化器到残差,雅可比矩阵计算的整个计算流程。
才疏学浅,如有错误,欢迎批评指正!