Halcon实战项目讲解,定位,基于汽车离合片精密定位尝试。
Halcon实战项目讲解,定位,基于汽车离合片精密定位尝试。

在离合片的凸出齿部任意的一个齿下刻蚀一个23mm的数字字符。单齿的空间为34mm。
所需要完成内容,定位到齿靠下部分的位置,并传输坐标和角度。
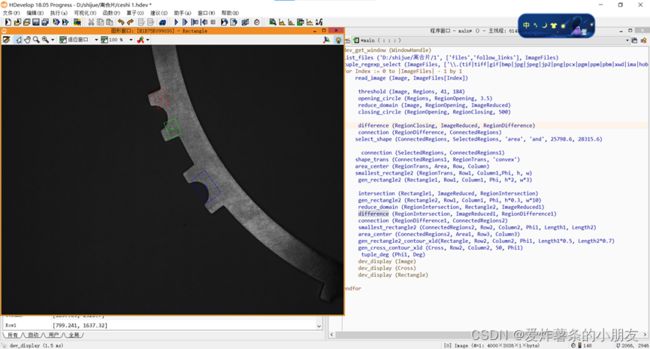
Halcon程序一览:
dev_get_window (WindowHandle)
list_files (‘D:/shijue/离合片/1’, [‘files’,‘follow_links’], ImageFiles)
tuple_regexp_select (ImageFiles, [’\.(tif|tiff|gif|bmp|jpg|jpeg|jp2|png|pcx|pgm|ppm|pbm|xwd|ima|hobj)$’,‘ignore_case’], ImageFiles)
for Index := 0 to |ImageFiles| - 1 by 1
read_image (Image, ImageFiles[Index])
threshold (Image, Regions, 41, 184)
opening_circle (Regions, RegionOpening, 3.5)
reduce_domain (Image, RegionOpening, ImageReduced)
closing_circle (RegionOpening, RegionClosing, 500)
difference (RegionClosing, ImageReduced, RegionDifference)
connection (RegionDifference, ConnectedRegions)
select_shape (ConnectedRegions, SelectedRegions, 'area', 'and', 25798.6, 28315.6)
connection (SelectedRegions, ConnectedRegions1)
shape_trans (ConnectedRegions1, RegionTrans, 'convex')
area_center (RegionTrans, Area, Row, Column)
smallest_rectangle2 (RegionTrans, Row1, Column1,Phi, h, w)
gen_rectangle2 (Rectangle1, Row1, Column1, Phi, h*2, w*3)
intersection (Rectangle1, ImageReduced, RegionIntersection)
gen_rectangle2 (Rectangle2, Row1, Column1, Phi, h*0.3, w*10)
reduce_domain (RegionIntersection, Rectangle2, ImageReduced1)
difference (RegionIntersection, ImageReduced1, RegionDifference1)
connection (RegionDifference1, ConnectedRegions2)
smallest_rectangle2 (ConnectedRegions2, Row2, Column2, Phi1, Length1, Length2)
area_center (ConnectedRegions2, Area1, Row3, Column3)
gen_rectangle2_contour_xld(Rectangle, Row2, Column2, Phi1, Length1*0.5, Length2*0.7)
gen_cross_contour_xld (Cross, Row2, Column2, 50, Phi1)
tuple_deg (Phi1, Deg)
dev_display (Image)
dev_display (Cross)
dev_display (Rectangle)
endfor
实际效果图:
各行代码详解:
dev_get_window (WindowHandle)
//读取图像的窗口句柄
list_files (‘D:/shijue/离合片/1’, [‘files’,‘follow_links’], ImageFiles)
tuple_regexp_select (ImageFiles, [’\.(tif|tiff|gif|bmp|jpg|jpeg|jp2|png|pcx|pgm|ppm|pbm|xwd|ima|hobj)$’,‘ignore_case’], ImageFiles)
for Index := 0 to |ImageFiles| - 1 by 1
//使用图像助手对路径进行读取图像
read_image (Image, ImageFiles[Index])
//读图
//blob分析
threshold (Image, Regions, 41, 184)
//阀值二值化,将离合片区域提取出来。
opening_circle (Regions, RegionOpening, 3.5)
//基于圆形开运算,去除多余的毛刺和噪点
reduce_domain (Image, RegionOpening, ImageReduced)
//对离合片区域进行裁图
closing_circle (RegionOpening, RegionClosing, 500)
//对离合片进行闭运算。
效果:
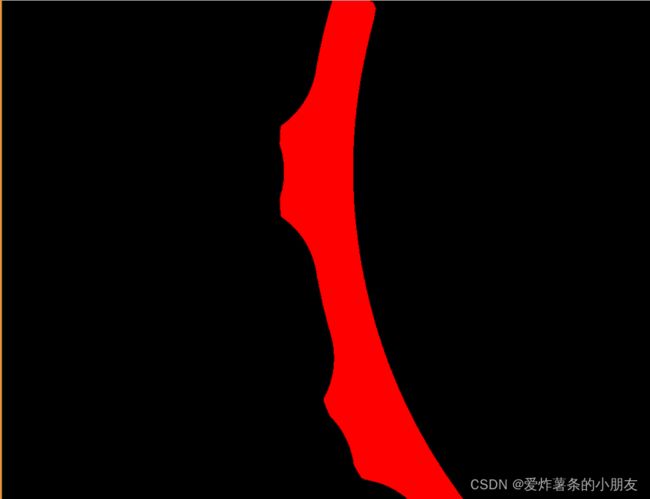
//目的在于提取齿旁边的凹部,方便作为基准点找到齿所在的位置
difference (RegionClosing, ImageReduced, RegionDifference)
//进行差值运算。将闭运算的图像与离合片的区域图像进行差运算提取一个膨胀的凹部
connection (RegionDifference, ConnectedRegions)
//断开
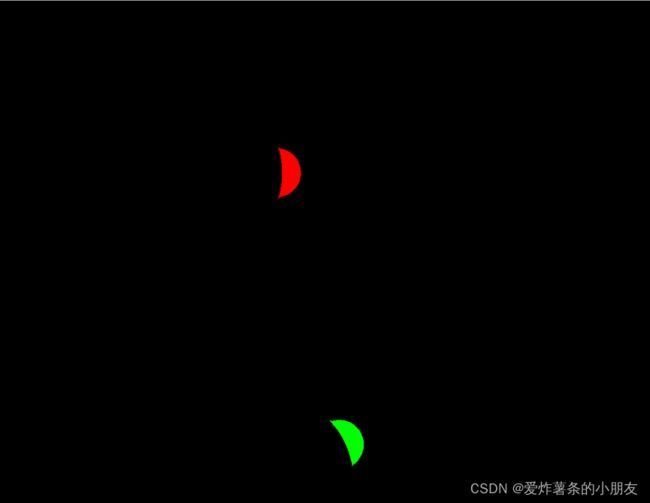
select_shape (ConnectedRegions, SelectedRegions, ‘area’, ‘and’, 25798.6, 28315.6)
//特征选择,选择凹部的空间。
效果:
connection (SelectedRegions, ConnectedRegions1)
//再次断开
shape_trans (ConnectedRegions1, RegionTrans, ‘convex’)
//形成区域
smallest_rectangle2 (RegionTrans, Row1, Column1,Phi, h, w)
//形成最小外接矩形
gen_rectangle2 (Rectangle1, Row1, Column1, Phi, h2, w3)
//形成矩形区域

//目的在于形成的矩形区域要为我们方便可以找到我们所需要的区域
intersection (Rectangle1, ImageReduced, RegionIntersection)
//求取交集,将矩形区域和离合片的区域进行求取交集,用于提取到齿的部分
效果:
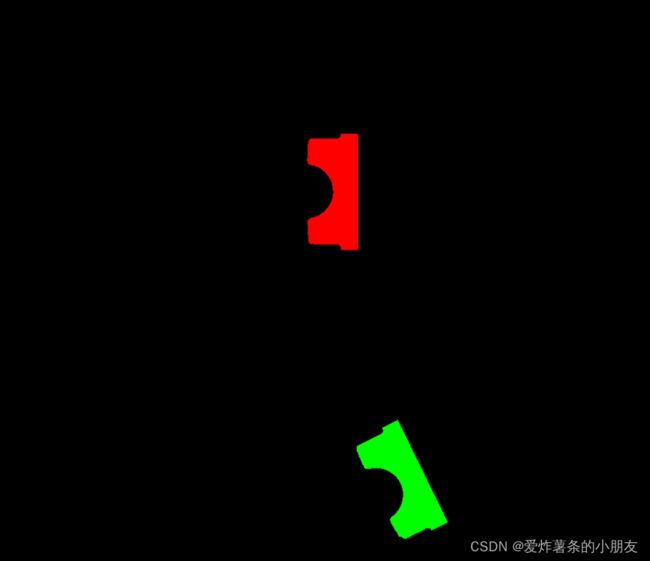
gen_rectangle2 (Rectangle2, Row1, Column1, Phi, h*0.3, w*10)
//形成一个对第一个区域的中间矩形,目的在于我们只需要单边的齿,所以必须要将凸出部从中间断开
reduce_domain (RegionIntersection, Rectangle2, ImageReduced1)
//裁图,用矩形区域和求交集的图像。
difference (RegionIntersection, ImageReduced1, RegionDifference1)
//再次求差值,目的在于将凸出部断开。
效果:

//在选择断开的矩形的时候我们应该找准我们需要的坐标,用合适的大小进行裁剪
connection (RegionDifference1, ConnectedRegions2)
//断开
smallest_rectangle2 (ConnectedRegions2, Row2, Column2, Phi1, Length1, Length2)
//对图像求取最小外接矩形,获取到坐标和角度
gen_rectangle2_contour_xld(Rectangle, Row2, Column2, Phi1, Length10.5, Length20.7)
//形成矩形轮廓用于显示刻蚀字符位置
gen_cross_contour_xld (Cross, Row2, Column2, 50, Phi1)
//形成中心点
tuple_deg (Phi1, Deg)
//弧度转化为角度
dev_display (Image)
dev_display (Cross)
dev_display (Rectangle)
endfor
总结:
在离合片这个项目中,重点在于如何提取凸出部的位置(即为齿所在的位置)。在使用模板匹配的时候对于精密定位是有很大的偏差,精准度低的现象。所以我们在良好的打光的情况下可以直接使用blob分析,将多种手法运用在其中。其中差值算子最常用于对毛刺的缺陷检测,取交集最常用于OCR的识别。Blob分析在基本所有的视觉问题都非常常见。
本程序为本人自己练习书写,非交付实际使用源码,仅供学习参考。
附录:其他打光图:



