yolov5代码及原理详解
yolov5代码及原理解析
文章目录
- yolov5代码及原理解析
- 一、代码及原理解析
-
- 1、输入端
-
- (1) letterbox
- (2) Mosaic增强
- (3) anchor
-
- 1)关闭时
- 2)开启时
- 2、Backbone
-
- (1)Focus结构
- (2)CSP
- (3)SPP
- 3、Neck
- 4、输出端
-
- (1)输出通道数
- (2)损失函数计算
-
- 1)锚框选取
- 2)IoU_loss计算
- 3)BCELoss
- (3)NMS最大值抑制
- 5、评价指标
- 二、不同复杂度的yolov5模型
-
- 1.不同模型参数
-
- (1)yolov5s
- (2)yolov5m
- (3)yolov5l
- (4)yolov5x
- 2.参数影响
-
- (1)depth_multiple
- (2)width_multiple
- 主要参考文章及视频
一、代码及原理解析
1、输入端
(1) letterbox
此模块作用为将原始图片统一缩放到一个标准尺寸,再送入检测网络中。
def letterbox(im, new_shape=(640, 640), color=(114, 114, 114), auto=True, scaleFill=False, scaleup=True, stride=32):
# Resize and pad image while meeting stride-multiple constraints
shape = im.shape[:2] # current shape [height, width]
if isinstance(new_shape, int):
new_shape = (new_shape, new_shape)
# Scale ratio (new / old)
r = min(new_shape[0] / shape[0], new_shape[1] / shape[1])
if not scaleup: # only scale down, do not scale up (for better val mAP)
r = min(r, 1.0)
# Compute padding
ratio = r, r # width, height ratios
new_unpad = int(round(shape[1] * r)), int(round(shape[0] * r))
dw, dh = new_shape[1] - new_unpad[0], new_shape[0] - new_unpad[1] # wh padding
if auto: # minimum rectangle
dw, dh = np.mod(dw, stride), np.mod(dh, stride) # wh padding
elif scaleFill: # stretch
dw, dh = 0.0, 0.0
new_unpad = (new_shape[1], new_shape[0])
ratio = new_shape[1] / shape[1], new_shape[0] / shape[0] # width, height ratios
dw /= 2 # divide padding into 2 sides
dh /= 2
if shape[::-1] != new_unpad: # resize
im = cv2.resize(im, new_unpad, interpolation=cv2.INTER_LINEAR)
top, bottom = int(round(dh - 0.1)), int(round(dh + 0.1))
left, right = int(round(dw - 0.1)), int(round(dw + 0.1))
im = cv2.copyMakeBorder(im, top, bottom, left, right, cv2.BORDER_CONSTANT, value=color) # add border
return im, ratio, (dw, dh)
步骤为:
1)计算new_shape[0] / shape[0]和new_shape[1] / shape[1],选取其最小值r。
2)将原图像resize为int(round(shape[1] * r)), int(round(shape[0] * r))。
3)分别计算new_shape[1] - new_unpad[0]对stride(默认是32)取余数和new_shape[0] - new_unpad[1]对stride(默认是32)取余数的结果,记为dw和dh。
4)在resize后的图像的基础上填充dw和dh大小像素的空白边界像素。
(2) Mosaic增强
首先介绍一下load_image函数
def load_image(self, i):
# Loads 1 image from dataset index 'i', returns (im, original hw, resized hw)
im, f, fn = self.ims[i], self.im_files[i], self.npy_files[i],
if im is None: # not cached in RAM
if fn.exists(): # load npy
im = np.load(fn)
else: # read image
im = cv2.imread(f) # BGR
assert im is not None, f'Image Not Found {f}'
h0, w0 = im.shape[:2] # orig hw
r = self.img_size / max(h0, w0) # ratio
if r != 1: # if sizes are not equal
im = cv2.resize(im,
(int(w0 * r), int(h0 * r)),
interpolation=cv2.INTER_LINEAR if (self.augment or r > 1) else cv2.INTER_AREA)
return im, (h0, w0), im.shape[:2] # im, hw_original, hw_resized
else:
return self.ims[i], self.im_hw0[i], self.im_hw[i] # im, hw_original, hw_resized
其类似于letterbox,只是缺少了填充边缘的步骤。此函数将图像进行resize并输出resize前后的图像大小。
接下来看一下四张图进行Mosaic增强的函数load_mosaic:
def load_mosaic(self, index):
# YOLOv5 4-mosaic loader. Loads 1 image + 3 random images into a 4-image mosaic
labels4, segments4 = [], []
s = self.img_size
yc, xc = (int(random.uniform(-x, 2 * s + x)) for x in self.mosaic_border) # mosaic center x, y
indices = [index] + random.choices(self.indices, k=3) # 3 additional image indices
random.shuffle(indices)
for i, index in enumerate(indices):
# Load image
img, _, (h, w) = self.load_image(index)
# place img in img4
if i == 0: # top left
img4 = np.full((s * 2, s * 2, img.shape[2]), 114, dtype=np.uint8) # base image with 4 tiles
x1a, y1a, x2a, y2a = max(xc - w, 0), max(yc - h, 0), xc, yc # xmin, ymin, xmax, ymax (large image)
x1b, y1b, x2b, y2b = w - (x2a - x1a), h - (y2a - y1a), w, h # xmin, ymin, xmax, ymax (small image)
elif i == 1: # top right
x1a, y1a, x2a, y2a = xc, max(yc - h, 0), min(xc + w, s * 2), yc
x1b, y1b, x2b, y2b = 0, h - (y2a - y1a), min(w, x2a - x1a), h
elif i == 2: # bottom left
x1a, y1a, x2a, y2a = max(xc - w, 0), yc, xc, min(s * 2, yc + h)
x1b, y1b, x2b, y2b = w - (x2a - x1a), 0, w, min(y2a - y1a, h)
elif i == 3: # bottom right
x1a, y1a, x2a, y2a = xc, yc, min(xc + w, s * 2), min(s * 2, yc + h)
x1b, y1b, x2b, y2b = 0, 0, min(w, x2a - x1a), min(y2a - y1a, h)
img4[y1a:y2a, x1a:x2a] = img[y1b:y2b, x1b:x2b] # img4[ymin:ymax, xmin:xmax]
padw = x1a - x1b
padh = y1a - y1b
# Labels
labels, segments = self.labels[index].copy(), self.segments[index].copy()
if labels.size:
labels[:, 1:] = xywhn2xyxy(labels[:, 1:], w, h, padw, padh) # normalized xywh to pixel xyxy format
segments = [xyn2xy(x, w, h, padw, padh) for x in segments]
labels4.append(labels)
segments4.extend(segments)
# Concat/clip labels
labels4 = np.concatenate(labels4, 0)
for x in (labels4[:, 1:], *segments4):
np.clip(x, 0, 2 * s, out=x) # clip when using random_perspective()
# img4, labels4 = replicate(img4, labels4) # replicate
# Augment
img4, labels4, segments4 = copy_paste(img4, labels4, segments4, p=self.hyp['copy_paste'])
img4, labels4 = random_perspective(img4, labels4, segments4,
degrees=self.hyp['degrees'],
translate=self.hyp['translate'],
scale=self.hyp['scale'],
shear=self.hyp['shear'],
perspective=self.hyp['perspective'],
border=self.mosaic_border) # border to remove
return img4, labels4
步骤如下:
1)确定拼接的四张图片的相接的点yc, xc,其为(img_size//2,3img_size//2)中的随机点。
2)随机抽取序列号为index的图片,通过load_image函数将其resize并读取resize后的h和w。
3)生成(2img_size,2*img_size)的空白图片,并将resize后的小图片复制到大空白图片中。
注意:由于yc, xc是随机的,最终填充的图片中可能存在大量空白。
由上述程序可以看到,load_mosaic函数中还存在random_perspective函数,此函数中包含了一些其它的图像增强操作,包括degrees:旋转;translate:水平和垂直转换;scale:缩放;shear:图片裁剪;perspective:透视变换。
相应程序如下所示:
def random_perspective(im, targets=(), segments=(), degrees=10, translate=.1, scale=.1, shear=10, perspective=0.0,
border=(0, 0)):
# torchvision.transforms.RandomAffine(degrees=(-10, 10), translate=(0.1, 0.1), scale=(0.9, 1.1), shear=(-10, 10))
# targets = [cls, xyxy]
height = im.shape[0] + border[0] * 2 # shape(h,w,c)
width = im.shape[1] + border[1] * 2
# Center
C = np.eye(3)
C[0, 2] = -im.shape[1] / 2 # x translation (pixels)
C[1, 2] = -im.shape[0] / 2 # y translation (pixels)
# Perspective
P = np.eye(3)
P[2, 0] = random.uniform(-perspective, perspective) # x perspective (about y)
P[2, 1] = random.uniform(-perspective, perspective) # y perspective (about x)
# Rotation and Scale
R = np.eye(3)
a = random.uniform(-degrees, degrees)
# a += random.choice([-180, -90, 0, 90]) # add 90deg rotations to small rotations
s = random.uniform(1 - scale, 1 + scale)
# s = 2 ** random.unifoonMatrix2D(angle=a, center=(0, 0), scale=s)
rm(-scale, scale)
R[:2] = cv2.getRotati
# Shear
S = np.eye(3)
S[0, 1] = math.tan(random.uniform(-shear, shear) * math.pi / 180) # x shear (deg)
S[1, 0] = math.tan(random.uniform(-shear, shear) * math.pi / 180) # y shear (deg)
# Translation
T = np.eye(3)
T[0, 2] = random.uniform(0.5 - translate, 0.5 + translate) * width # x translation (pixels)
T[1, 2] = random.uniform(0.5 - translate, 0.5 + translate) * height # y translation (pixels)
# Combined rotation matrix
M = T @ S @ R @ P @ C # order of operations (right to left) is IMPORTANT
if (border[0] != 0) or (border[1] != 0) or (M != np.eye(3)).any(): # image changed
if perspective:
im = cv2.warpPerspective(im, M, dsize=(width, height), borderValue=(114, 114, 114))
else: # affine
im = cv2.warpAffine(im, M[:2], dsize=(width, height), borderValue=(114, 114, 114))
# Visualize
# import matplotlib.pyplot as plt
# ax = plt.subplots(1, 2, figsize=(12, 6))[1].ravel()
# ax[0].imshow(im[:, :, ::-1]) # base
# ax[1].imshow(im2[:, :, ::-1]) # warped
# Transform label coordinates
n = len(targets)
if n:
use_segments = any(x.any() for x in segments)
new = np.zeros((n, 4))
if use_segments: # warp segments
segments = resample_segments(segments) # upsample
for i, segment in enumerate(segments):
xy = np.ones((len(segment), 3))
xy[:, :2] = segment
xy = xy @ M.T # transform
xy = xy[:, :2] / xy[:, 2:3] if perspective else xy[:, :2] # perspective rescale or affine
# clip
new[i] = segment2box(xy, width, height)
else: # warp boxes
xy = np.ones((n * 4, 3))
xy[:, :2] = targets[:, [1, 2, 3, 4, 1, 4, 3, 2]].reshape(n * 4, 2) # x1y1, x2y2, x1y2, x2y1
xy = xy @ M.T # transform
xy = (xy[:, :2] / xy[:, 2:3] if perspective else xy[:, :2]).reshape(n, 8) # perspective rescale or affine
# create new boxes
x = xy[:, [0, 2, 4, 6]]
y = xy[:, [1, 3, 5, 7]]
new = np.concatenate((x.min(1), y.min(1), x.max(1), y.max(1))).reshape(4, n).T
# clip
new[:, [0, 2]] = new[:, [0, 2]].clip(0, width)
new[:, [1, 3]] = new[:, [1, 3]].clip(0, height)
# filter candidates
i = box_candidates(box1=targets[:, 1:5].T * s, box2=new.T, area_thr=0.01 if use_segments else 0.10)
targets = targets[i]
targets[:, 1:5] = new[i]
return im, targets
除了上述的四张图像的Mosaic增强外,程序中还有九张图像的Mosaic增强函数load_mosaic9:
def load_mosaic9(self, index):
# YOLOv5 9-mosaic loader. Loads 1 image + 8 random images into a 9-image mosaic
labels9, segments9 = [], []
s = self.img_size
indices = [index] + random.choices(self.indices, k=8) # 8 additional image indices
random.shuffle(indices)
hp, wp = -1, -1 # height, width previous
for i, index in enumerate(indices):
# Load image
img, _, (h, w) = self.load_image(index)
# place img in img9
if i == 0: # center
img9 = np.full((s * 3, s * 3, img.shape[2]), 114, dtype=np.uint8) # base image with 4 tiles
h0, w0 = h, w
c = s, s, s + w, s + h # xmin, ymin, xmax, ymax (base) coordinates
elif i == 1: # top
c = s, s - h, s + w, s
elif i == 2: # top right
c = s + wp, s - h, s + wp + w, s
elif i == 3: # right
c = s + w0, s, s + w0 + w, s + h
elif i == 4: # bottom right
c = s + w0, s + hp, s + w0 + w, s + hp + h
elif i == 5: # bottom
c = s + w0 - w, s + h0, s + w0, s + h0 + h
elif i == 6: # bottom left
c = s + w0 - wp - w, s + h0, s + w0 - wp, s + h0 + h
elif i == 7: # left
c = s - w, s + h0 - h, s, s + h0
elif i == 8: # top left
c = s - w, s + h0 - hp - h, s, s + h0 - hp
padx, pady = c[:2]
x1, y1, x2, y2 = (max(x, 0) for x in c) # allocate coords
# Labels
labels, segments = self.labels[index].copy(), self.segments[index].copy()
if labels.size:
labels[:, 1:] = xywhn2xyxy(labels[:, 1:], w, h, padx, pady) # normalized xywh to pixel xyxy format
segments = [xyn2xy(x, w, h, padx, pady) for x in segments]
labels9.append(labels)
segments9.extend(segments)
# Image
img9[y1:y2, x1:x2] = img[y1 - pady:, x1 - padx:] # img9[ymin:ymax, xmin:xmax]
hp, wp = h, w # height, width previous
# Offset
yc, xc = (int(random.uniform(0, s)) for _ in self.mosaic_border) # mosaic center x, y
img9 = img9[yc:yc + 2 * s, xc:xc + 2 * s]
# Concat/clip labels
labels9 = np.concatenate(labels9, 0)
labels9[:, [1, 3]] -= xc
labels9[:, [2, 4]] -= yc
c = np.array([xc, yc]) # centers
segments9 = [x - c for x in segments9]
for x in (labels9[:, 1:], *segments9):
np.clip(x, 0, 2 * s, out=x) # clip when using random_perspective()
# img9, labels9 = replicate(img9, labels9) # replicate
# Augment
img9, labels9 = random_perspective(img9, labels9, segments9,
degrees=self.hyp['degrees'],
translate=self.hyp['translate'],
scale=self.hyp['scale'],
shear=self.hyp['shear'],
perspective=self.hyp['perspective'],
border=self.mosaic_border) # border to remove
return img9, labels9
(3) anchor
yolov5中具有autoanchor功能,在设置时默认关闭:
parser.add_argument('--noautoanchor', action='store_true', help='disable AutoAnchor')
若想启用,可设置为True。
下面介绍一下此功能开启和关闭时yolov5都是怎样训练锚框的。
1)关闭时
在\yolov5-master\models\内有yolov5系列模型的yaml参数文件,以yolov5s为例,其关于anchor的描述为:
anchors:
- [10,13, 16,30, 33,23] # P3/8
- [30,61, 62,45, 59,119] # P4/16
- [116,90, 156,198, 373,326] # P5/32
其中有三行,每行有三个anchors,每行代表不同尺度下的anchors,最终代表在三个不同尺度的特征图下的各三个anchors,其参数代表w和h。
大的特征图对应于小的anchors,小的特征图对应于大的anchors。
例:图像大小默认为640,其对应的特征图分别为:
三次下采样:640/8=80;四次下采样:640/16=40;五次下采样:640/32=20;
其anchors的描述包括:
位置:特征图中的每个网格;
大小:anchors的大小,由yaml中的预设anchors中的参数决定。
对于8080大小的特征图,其初始anchors大小即为第一行参数整体/8;
对于4040大小的特征图,其初始anchors大小即为第一行参数整体/16;
对于20*20大小的特征图,其初始anchors大小即为第一行参数整体/32;
由此,通过计算最终输出anchors和gt的差别,将其汇总在loss中,便可实现对anchors的调整,并将信息汇集在网络参数中。
2)开启时
autoanchors代码描述在\yolov5-master\utils\autoanchor.py中,其包括三个函数:
def check_anchor_order(m):
def check_anchors(dataset, model, thr=4.0, imgsz=640):
def kmean_anchors(dataset='./data/coco128.yaml', n=9, img_size=640, thr=4.0, gen=1000, verbose=True):
其中,第二、三个函数较为重要,check_anchors函数为计算生成的anchors和gt的符合程度是否高于0.98,若高于,则按生成的anchors继续进行训练,若低于,则启用kmean_anchors函数进行anchors的生成。
def check_anchors(dataset, model, thr=4.0, imgsz=640):
# Check anchor fit to data, recompute if necessary
m = model.module.model[-1] if hasattr(model, 'module') else model.model[-1] # Detect()
shapes = imgsz * dataset.shapes / dataset.shapes.max(1, keepdims=True)
scale = np.random.uniform(0.9, 1.1, size=(shapes.shape[0], 1)) # augment scale
wh = torch.tensor(np.concatenate([l[:, 3:5] * s for s, l in zip(shapes * scale, dataset.labels)])).float() # wh
def metric(k): # compute metric
r = wh[:, None] / k[None]
x = torch.min(r, 1 / r).min(2)[0] # ratio metric
best = x.max(1)[0] # best_x
aat = (x > 1 / thr).float().sum(1).mean() # anchors above threshold
bpr = (best > 1 / thr).float().mean() # best possible recall
return bpr, aat
anchors = m.anchors.clone() * m.stride.to(m.anchors.device).view(-1, 1, 1) # current anchors
bpr, aat = metric(anchors.cpu().view(-1, 2))
s = f'\n{PREFIX}{aat:.2f} anchors/target, {bpr:.3f} Best Possible Recall (BPR). '
if bpr > 0.98: # threshold to recompute
LOGGER.info(emojis(f'{s}Current anchors are a good fit to dataset ✅'))
else:
LOGGER.info(emojis(f'{s}Anchors are a poor fit to dataset ⚠️, attempting to improve...'))
na = m.anchors.numel() // 2 # number of anchors
try:
anchors = kmean_anchors(dataset, n=na, img_size=imgsz, thr=thr, gen=1000, verbose=False)
except Exception as e:
LOGGER.info(f'{PREFIX}ERROR: {e}')
new_bpr = metric(anchors)[0]
if new_bpr > bpr: # replace anchors
anchors = torch.tensor(anchors, device=m.anchors.device).type_as(m.anchors)
m.anchors[:] = anchors.clone().view_as(m.anchors) / m.stride.to(m.anchors.device).view(-1, 1, 1) # loss
check_anchor_order(m)
s = f'{PREFIX}Done ✅ (optional: update model *.yaml to use these anchors in the future)'
else:
s = f'{PREFIX}Done ⚠️ (original anchors better than new anchors, proceeding with original anchors)'
LOGGER.info(emojis(s))
def kmean_anchors(dataset='./data/coco128.yaml', n=9, img_size=640, thr=4.0, gen=1000, verbose=True):
""" Creates kmeans-evolved anchors from training dataset
Arguments:
dataset: path to data.yaml, or a loaded dataset
n: number of anchors
img_size: image size used for training
thr: anchor-label wh ratio threshold hyperparameter hyp['anchor_t'] used for training, default=4.0
gen: generations to evolve anchors using genetic algorithm
verbose: print all results
Return:
k: kmeans evolved anchors
Usage:
from utils.autoanchor import *; _ = kmean_anchors()
"""
from scipy.cluster.vq import kmeans
npr = np.random
thr = 1 / thr
def metric(k, wh): # compute metrics
r = wh[:, None] / k[None]
x = torch.min(r, 1 / r).min(2)[0] # ratio metric
# x = wh_iou(wh, torch.tensor(k)) # iou metric
return x, x.max(1)[0] # x, best_x
def anchor_fitness(k): # mutation fitness
_, best = metric(torch.tensor(k, dtype=torch.float32), wh)
return (best * (best > thr).float()).mean() # fitness
def print_results(k, verbose=True):
k = k[np.argsort(k.prod(1))] # sort small to large
x, best = metric(k, wh0)
bpr, aat = (best > thr).float().mean(), (x > thr).float().mean() * n # best possible recall, anch > thr
s = f'{PREFIX}thr={thr:.2f}: {bpr:.4f} best possible recall, {aat:.2f} anchors past thr\n' \
f'{PREFIX}n={n}, img_size={img_size}, metric_all={x.mean():.3f}/{best.mean():.3f}-mean/best, ' \
f'past_thr={x[x > thr].mean():.3f}-mean: '
for i, x in enumerate(k):
s += '%i,%i, ' % (round(x[0]), round(x[1]))
if verbose:
LOGGER.info(s[:-2])
return k
if isinstance(dataset, str): # *.yaml file
with open(dataset, errors='ignore') as f:
data_dict = yaml.safe_load(f) # model dict
from utils.datasets import LoadImagesAndLabels
dataset = LoadImagesAndLabels(data_dict['train'], augment=True, rect=True)
# Get label wh
shapes = img_size * dataset.shapes / dataset.shapes.max(1, keepdims=True)
wh0 = np.concatenate([l[:, 3:5] * s for s, l in zip(shapes, dataset.labels)]) # wh
# Filter
i = (wh0 < 3.0).any(1).sum()
if i:
LOGGER.info(f'{PREFIX}WARNING: Extremely small objects found: {i} of {len(wh0)} labels are < 3 pixels in size')
wh = wh0[(wh0 >= 2.0).any(1)] # filter > 2 pixels
# wh = wh * (npr.rand(wh.shape[0], 1) * 0.9 + 0.1) # multiply by random scale 0-1
# Kmeans init
try:
LOGGER.info(f'{PREFIX}Running kmeans for {n} anchors on {len(wh)} points...')
assert n <= len(wh) # apply overdetermined constraint
s = wh.std(0) # sigmas for whitening
k = kmeans(wh / s, n, iter=30)[0] * s # points
assert n == len(k) # kmeans may return fewer points than requested if wh is insufficient or too similar
except Exception:
LOGGER.warning(f'{PREFIX}WARNING: switching strategies from kmeans to random init')
k = np.sort(npr.rand(n * 2)).reshape(n, 2) * img_size # random init
wh, wh0 = (torch.tensor(x, dtype=torch.float32) for x in (wh, wh0))
k = print_results(k, verbose=False)
# Plot
# k, d = [None] * 20, [None] * 20
# for i in tqdm(range(1, 21)):
# k[i-1], d[i-1] = kmeans(wh / s, i) # points, mean distance
# fig, ax = plt.subplots(1, 2, figsize=(14, 7), tight_layout=True)
# ax = ax.ravel()
# ax[0].plot(np.arange(1, 21), np.array(d) ** 2, marker='.')
# fig, ax = plt.subplots(1, 2, figsize=(14, 7)) # plot wh
# ax[0].hist(wh[wh[:, 0]<100, 0],400)
# ax[1].hist(wh[wh[:, 1]<100, 1],400)
# fig.savefig('wh.png', dpi=200)
# Evolve
f, sh, mp, s = anchor_fitness(k), k.shape, 0.9, 0.1 # fitness, generations, mutation prob, sigma
pbar = tqdm(range(gen), desc=f'{PREFIX}Evolving anchors with Genetic Algorithm:') # progress bar
for _ in pbar:
v = np.ones(sh)
while (v == 1).all(): # mutate until a change occurs (prevent duplicates)
v = ((npr.random(sh) < mp) * random.random() * npr.randn(*sh) * s + 1).clip(0.3, 3.0)
kg = (k.copy() * v).clip(min=2.0)
fg = anchor_fitness(kg)
if fg > f:
f, k = fg, kg.copy()
pbar.desc = f'{PREFIX}Evolving anchors with Genetic Algorithm: fitness = {f:.4f}'
if verbose:
print_results(k, verbose)
return print_results(k)
总体步骤:
1)计算指标,判断其是否超过0.98,若超过,则不执行自适应anchors,若不超过,则执行2;
2)采用k_mean算法进行聚类,得到新的初始anchors的w和h;
3)采用遗传算法对w和h进行突变,执行1000次,观察其是否有优化。
此方法在yolo之前版本也存在,但是yolov5将其直接嵌入在主代码中,可自动调用。
接下来介绍一下yolov5的整体框架:
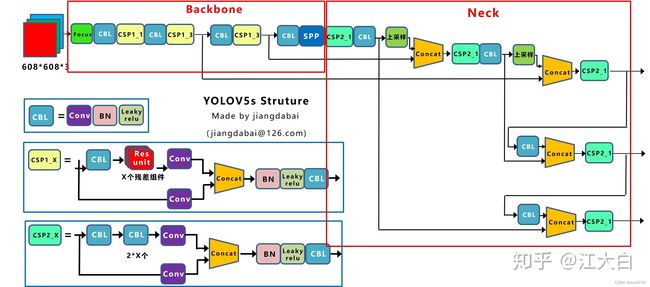
整体框架中包含了Backbone和Neck,接下来分别介绍这两部分。模型组件相关代码在\yolov5-master\models\common.py中。
2、Backbone
(1)Focus结构
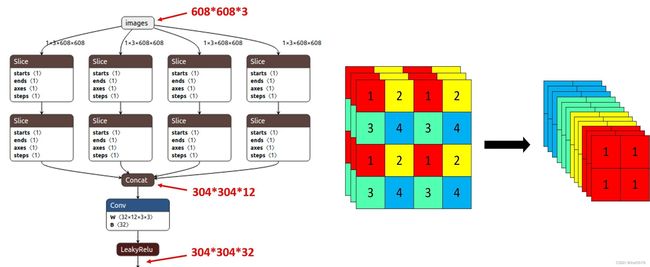
Focus模块在v5中是图片进入backbone前,对图片进行切片操作,具体操作是在一张图片中每隔一个像素拿到一个值,类似于邻近下采样,这样就拿到了四张图片,四张图片互补,长的差不多,但是没有信息丢失,这样一来,将W、H信息就集中到了通道空间,输入通道扩充了4倍,即拼接起来的图片相对于原先的RGB三通道模式变成了12个通道,最后将得到的新图片再经过卷积操作,最终得到了没有信息丢失情况下的二倍下采样特征图。
以yolov5s为例,原始的640 × 640 × 3的图像输入Focus结构,采用切片操作,先变成320 × 320 × 12的特征图,再经过一次卷积操作,最终变成320 × 320 × 32的特征图。
class Focus(nn.Module):
# Focus wh information into c-space
def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups
super().__init__()
self.conv = Conv(c1 * 4, c2, k, s, p, g, act)
# self.contract = Contract(gain=2)
def forward(self, x): # x(b,c,w,h) -> y(b,4c,w/2,h/2)
return self.conv(torch.cat([x[..., ::2, ::2], x[..., 1::2, ::2], x[..., ::2, 1::2], x[..., 1::2, 1::2]], 1))
# return self.conv(self.contract(x))
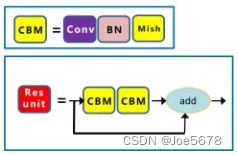
(2)CSP
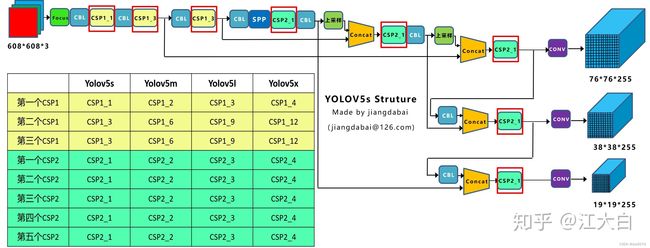
Backbone采用CSP1_X,Neck采用CSP2_X,其结构如上面的结构图所示。
其中,Res unit如下图所示。
class BottleneckCSP(nn.Module):
# CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
super().__init__()
c_ = int(c2 * e) # hidden channels
self.cv1 = Conv(c1, c_, 1, 1)
self.cv2 = nn.Conv2d(c1, c_, 1, 1, bias=False)
self.cv3 = nn.Conv2d(c_, c_, 1, 1, bias=False)
self.cv4 = Conv(2 * c_, c2, 1, 1)
self.bn = nn.BatchNorm2d(2 * c_) # applied to cat(cv2, cv3)
self.act = nn.SiLU()
self.m = nn.Sequential(*(Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)))
def forward(self, x):
y1 = self.cv3(self.m(self.cv1(x)))
y2 = self.cv2(x)
return self.cv4(self.act(self.bn(torch.cat((y1, y2), dim=1))))
(3)SPP

SPP的作用是得到更多不同的信息。
class SPP(nn.Module):
# Spatial Pyramid Pooling (SPP) layer https://arxiv.org/abs/1406.4729
def __init__(self, c1, c2, k=(5, 9, 13)):
super().__init__()
c_ = c1 // 2 # hidden channels
self.cv1 = Conv(c1, c_, 1, 1)
self.cv2 = Conv(c_ * (len(k) + 1), c2, 1, 1)
self.m = nn.ModuleList([nn.MaxPool2d(kernel_size=x, stride=1, padding=x // 2) for x in k])
def forward(self, x):
x = self.cv1(x)
with warnings.catch_warnings():
warnings.simplefilter('ignore') # suppress torch 1.9.0 max_pool2d() warning
return self.cv2(torch.cat([x] + [m(x) for m in self.m], 1))
其使用填充方法,使得经过max pooling后,尺寸不变,且步长为1,且每层max pooing的大小不同,分别为5、9、13。
3、Neck
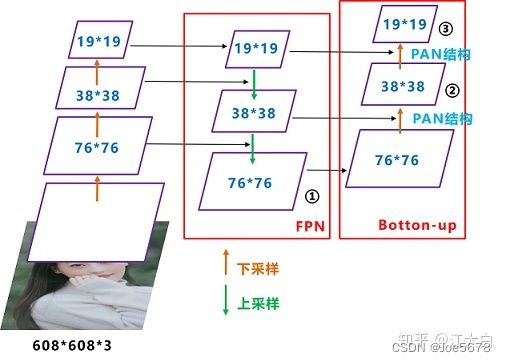
Yolov5采用FPN+PAN,整体框架图中第1、2、3、4、7、8个CBL具有下采样功能(conv步长为2),使得特征图可以按照上图所示进行concat,此种结构可以融合不同尺寸特征图的信息。
4、输出端
(1)输出通道数
每层特征图最终都会经过1乘1卷积,变成(5+分类数)乘3个通道(乘3是因为有3个anchors),分别是xywh(4个通道),置信度(存在目标的概率),分类数(每类存在的置信度)
(2)损失函数计算
yolov5中损失函数包含三项,分别为anchors和bbox的loss,classification的loss以及confidence的loss,为其加权之和(默认为0.05bbox_loss+0.5cls_loss+1*obj_loss)。下面介绍一些计算时的细节,其代码在yolov5-master\utils\loss.py中。
1)锚框选取
相关函数为build_targets:
def build_targets(self, p, targets):
# Build targets for compute_loss(), input targets(image,class,x,y,w,h)
na, nt = self.na, targets.shape[0] # number of anchors, targets
tcls, tbox, indices, anch = [], [], [], []
gain = torch.ones(7, device=targets.device) # normalized to gridspace gain
ai = torch.arange(na, device=targets.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
targets = torch.cat((targets.repeat(na, 1, 1), ai[:, :, None]), 2) # append anchor indices
g = 0.5 # bias
off = torch.tensor([[0, 0],
[1, 0], [0, 1], [-1, 0], [0, -1], # j,k,l,m
# [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
], device=targets.device).float() * g # offsets
for i in range(self.nl):
anchors = self.anchors[i]
gain[2:6] = torch.tensor(p[i].shape)[[3, 2, 3, 2]] # xyxy gain
# Match targets to anchors
t = targets * gain
if nt:
# Matches
r = t[:, :, 4:6] / anchors[:, None] # wh ratio
j = torch.max(r, 1 / r).max(2)[0] < self.hyp['anchor_t'] # compare
# j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n)=wh_iou(anchors(3,2), gwh(n,2))
t = t[j] # filter
# Offsets
gxy = t[:, 2:4] # grid xy
gxi = gain[[2, 3]] - gxy # inverse
j, k = ((gxy % 1 < g) & (gxy > 1)).T
l, m = ((gxi % 1 < g) & (gxi > 1)).T
j = torch.stack((torch.ones_like(j), j, k, l, m))
t = t.repeat((5, 1, 1))[j]
offsets = (torch.zeros_like(gxy)[None] + off[:, None])[j]
else:
t = targets[0]
offsets = 0
# Define
b, c = t[:, :2].long().T # image, class
gxy = t[:, 2:4] # grid xy
gwh = t[:, 4:6] # grid wh
gij = (gxy - offsets).long()
gi, gj = gij.T # grid xy indices
# Append
a = t[:, 6].long() # anchor indices
indices.append((b, a, gj.clamp_(0, gain[3] - 1), gi.clamp_(0, gain[2] - 1))) # image, anchor, grid indices
tbox.append(torch.cat((gxy - gij, gwh), 1)) # box
anch.append(anchors[a]) # anchors
tcls.append(c) # class
return tcls, tbox, indices, anch
build_ targets函数用于获得在训练时计算Loss函数所需要的目标框,即被认为是正样本
与yolov3/v4的不同: yolov5支持跨网格预测
对于任何一个bbox,三个输出预测特征层都可能有先验框anchors匹配;
该函数输出的正样本框比传入的targets (GT框) 数目多
具体处理过程:
(1)对于任何一层计算当前bbox和当前层anchor的匹配程度,不采用iou, 而是shape比例;如果anchor和bbox的宽高比差距大于4,则认为不匹配,此时忽略相应的bbox, 即当做背景;
(2)然后对bbox计算落在的网格所有anchors都计算Loss (并不是直接和GT框比较计算Loss)
注意此时落在网格不再是一个,而是附近的多个,这样就增加了正样本数,可能存在有些bbox在三个尺度都预测的情况;(最终从样本所在网格的上下左右四个网格中挑选两个网格,连同样本所在网格,共三个网格中选取anchors。
另外,yoLoy5也没有conf分支忽略阈值(ignore thresh)的操作, 而yoLov3/v4有 。
将这些anchors进行loss函数的计算。
2)IoU_loss计算
anchors和bbox的loss计算由IoU_loss得到。
各类IoU_loss的计算可以查看深入浅出Yolo系列之Yolov3&Yolov4&Yolov5&Yolox核心基础知识完整讲解4.3.4 Prediction创新
代码在yolov5-master\utils\metrics.py中。
bbox_iou用来计算IoU。
def bbox_iou(box1, box2, x1y1x2y2=True, GIoU=False, DIoU=False, CIoU=False, eps=1e-7):
# Returns the IoU of box1 to box2. box1 is 4, box2 is nx4
box2 = box2.T
# Get the coordinates of bounding boxes
if x1y1x2y2: # x1, y1, x2, y2 = box1
b1_x1, b1_y1, b1_x2, b1_y2 = box1[0], box1[1], box1[2], box1[3]
b2_x1, b2_y1, b2_x2, b2_y2 = box2[0], box2[1], box2[2], box2[3]
else: # transform from xywh to xyxy
b1_x1, b1_x2 = box1[0] - box1[2] / 2, box1[0] + box1[2] / 2
b1_y1, b1_y2 = box1[1] - box1[3] / 2, box1[1] + box1[3] / 2
b2_x1, b2_x2 = box2[0] - box2[2] / 2, box2[0] + box2[2] / 2
b2_y1, b2_y2 = box2[1] - box2[3] / 2, box2[1] + box2[3] / 2
# Intersection area
inter = (torch.min(b1_x2, b2_x2) - torch.max(b1_x1, b2_x1)).clamp(0) * \
(torch.min(b1_y2, b2_y2) - torch.max(b1_y1, b2_y1)).clamp(0)
# Union Area
w1, h1 = b1_x2 - b1_x1, b1_y2 - b1_y1 + eps
w2, h2 = b2_x2 - b2_x1, b2_y2 - b2_y1 + eps
union = w1 * h1 + w2 * h2 - inter + eps
iou = inter / union
if CIoU or DIoU or GIoU:
cw = torch.max(b1_x2, b2_x2) - torch.min(b1_x1, b2_x1) # convex (smallest enclosing box) width
ch = torch.max(b1_y2, b2_y2) - torch.min(b1_y1, b2_y1) # convex height
if CIoU or DIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1
c2 = cw ** 2 + ch ** 2 + eps # convex diagonal squared
rho2 = ((b2_x1 + b2_x2 - b1_x1 - b1_x2) ** 2 +
(b2_y1 + b2_y2 - b1_y1 - b1_y2) ** 2) / 4 # center distance squared
if CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47
v = (4 / math.pi ** 2) * torch.pow(torch.atan(w2 / h2) - torch.atan(w1 / h1), 2)
with torch.no_grad():
alpha = v / (v - iou + (1 + eps))
return iou - (rho2 / c2 + v * alpha) # CIoU
return iou - rho2 / c2 # DIoU
c_area = cw * ch + eps # convex area
return iou - (c_area - union) / c_area # GIoU https://arxiv.org/pdf/1902.09630.pdf
return iou # IoU
3)BCELoss
计算loss时,三类loss均采用此函数:
class BCEBlurWithLogitsLoss(nn.Module):
# BCEwithLogitLoss() with reduced missing label effects.
def __init__(self, alpha=0.05):
super().__init__()
self.loss_fcn = nn.BCEWithLogitsLoss(reduction='none') # must be nn.BCEWithLogitsLoss()
self.alpha = alpha
def forward(self, pred, true):
loss = self.loss_fcn(pred, true)
pred = torch.sigmoid(pred) # prob from logits
dx = pred - true # reduce only missing label effects
# dx = (pred - true).abs() # reduce missing label and false label effects
alpha_factor = 1 - torch.exp((dx - 1) / (self.alpha + 1e-4))
loss *= alpha_factor
return loss.mean()
(3)NMS最大值抑制
NMS的原理可以查看NMS原理大总结,其中yolov5将IoU进行了变换。
代码在yolov5-master\utils\general.py中:
def non_max_suppression(prediction, conf_thres=0.25, iou_thres=0.45, classes=None, agnostic=False, multi_label=False,
labels=(), max_det=300):
"""Runs Non-Maximum Suppression (NMS) on inference results
Returns:
list of detections, on (n,6) tensor per image [xyxy, conf, cls]
"""
nc = prediction.shape[2] - 5 # number of classes
xc = prediction[..., 4] > conf_thres # candidates
# Checks
assert 0 <= conf_thres <= 1, f'Invalid Confidence threshold {conf_thres}, valid values are between 0.0 and 1.0'
assert 0 <= iou_thres <= 1, f'Invalid IoU {iou_thres}, valid values are between 0.0 and 1.0'
# Settings
min_wh, max_wh = 2, 7680 # (pixels) minimum and maximum box width and height
max_nms = 30000 # maximum number of boxes into torchvision.ops.nms()
time_limit = 10.0 # seconds to quit after
redundant = True # require redundant detections
multi_label &= nc > 1 # multiple labels per box (adds 0.5ms/img)
merge = False # use merge-NMS
t = time.time()
output = [torch.zeros((0, 6), device=prediction.device)] * prediction.shape[0]
for xi, x in enumerate(prediction): # image index, image inference
# Apply constraints
x[((x[..., 2:4] < min_wh) | (x[..., 2:4] > max_wh)).any(1), 4] = 0 # width-height
x = x[xc[xi]] # confidence
# Cat apriori labels if autolabelling
if labels and len(labels[xi]):
lb = labels[xi]
v = torch.zeros((len(lb), nc + 5), device=x.device)
v[:, :4] = lb[:, 1:5] # box
v[:, 4] = 1.0 # conf
v[range(len(lb)), lb[:, 0].long() + 5] = 1.0 # cls
x = torch.cat((x, v), 0)
# If none remain process next image
if not x.shape[0]:
continue
# Compute conf
x[:, 5:] *= x[:, 4:5] # conf = obj_conf * cls_conf
# Box (center x, center y, width, height) to (x1, y1, x2, y2)
box = xywh2xyxy(x[:, :4])
# Detections matrix nx6 (xyxy, conf, cls)
if multi_label:
i, j = (x[:, 5:] > conf_thres).nonzero(as_tuple=False).T
x = torch.cat((box[i], x[i, j + 5, None], j[:, None].float()), 1)
else: # best class only
conf, j = x[:, 5:].max(1, keepdim=True)
x = torch.cat((box, conf, j.float()), 1)[conf.view(-1) > conf_thres]
# Filter by class
if classes is not None:
x = x[(x[:, 5:6] == torch.tensor(classes, device=x.device)).any(1)]
# Apply finite constraint
# if not torch.isfinite(x).all():
# x = x[torch.isfinite(x).all(1)]
# Check shape
n = x.shape[0] # number of boxes
if not n: # no boxes
continue
elif n > max_nms: # excess boxes
x = x[x[:, 4].argsort(descending=True)[:max_nms]] # sort by confidence
# Batched NMS
c = x[:, 5:6] * (0 if agnostic else max_wh) # classes
boxes, scores = x[:, :4] + c, x[:, 4] # boxes (offset by class), scores
i = torchvision.ops.nms(boxes, scores, iou_thres) # NMS
if i.shape[0] > max_det: # limit detections
i = i[:max_det]
if merge and (1 < n < 3E3): # Merge NMS (boxes merged using weighted mean)
# update boxes as boxes(i,4) = weights(i,n) * boxes(n,4)
iou = box_iou(boxes[i], boxes) > iou_thres # iou matrix
weights = iou * scores[None] # box weights
x[i, :4] = torch.mm(weights, x[:, :4]).float() / weights.sum(1, keepdim=True) # merged boxes
if redundant:
i = i[iou.sum(1) > 1] # require redundancy
output[xi] = x[i]
if (time.time() - t) > time_limit:
LOGGER.warning(f'WARNING: NMS time limit {time_limit}s exceeded')
break # time limit exceeded
return output
5、评价指标
以下三个链接既包含了原理介绍又包含了训练结果的解析:
YoloV5相关性能指标解析
YOLOv5基础知识点——性能指标
深度学习评估指标之目标检测——(yolov5 可视化训练结果以及result.txt解析)
二、不同复杂度的yolov5模型
不同模型区分的点为depth_multiple和width_multiple这两个参数。
1.不同模型参数
(1)yolov5s
depth_multiple: 0.33 # model depth multiple
width_multiple: 0.50 # layer channel multiple
(2)yolov5m
depth_multiple: 0.67 # model depth multiple
width_multiple: 0.75 # layer channel multiple
(3)yolov5l
depth_multiple: 1.0 # model depth multiple
width_multiple: 1.0 # layer channel multiple
(4)yolov5x
depth_multiple: 1.33 # model depth multiple
width_multiple: 1.25 # layer channel multiple
2.参数影响
(1)depth_multiple
将上面的CSP1和CSP2结构单独放在下面


depth_multiple这个参数影响的便是CSP1和CSP2的深度,即CSP1中的残差组件的数量和CSP2中的CBL数量。
而这个数量是如何计算得到的呢?
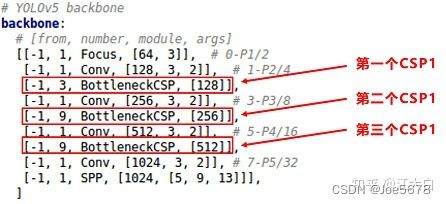
上图为yolov5s的backbone参数,图中红圈圈起来的变为CSP1的参数,其每个CSP1的残差单元数量便为第二个数字乘以depth_multiple。
例:其第一个CSP1中的残差组件数量为3depth_multiple=1,第二个CSP1中的残差组件数量为9depth_multiple=3,第三个CSP1中的残差组件数量为9*depth_multiple=3;
CSP2同样如此:
# YOLOv5 v6.0 head
head:
[[-1, 1, Conv, [512, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 6], 1, Concat, [1]], # cat backbone P4
[-1, 3, C3, [512, False]], # 13
[-1, 1, Conv, [256, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 4], 1, Concat, [1]], # cat backbone P3
[-1, 3, C3, [256, False]], # 17 (P3/8-small)
[-1, 1, Conv, [256, 3, 2]],
[[-1, 14], 1, Concat, [1]], # cat head P4
[-1, 3, C3, [512, False]], # 20 (P4/16-medium)
[-1, 1, Conv, [512, 3, 2]],
[[-1, 10], 1, Concat, [1]], # cat head P5
[-1, 3, C3, [1024, False]], # 23 (P5/32-large)
[[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
]
其CSP2中的CBL数量均为2*3depth_multiple=2个。
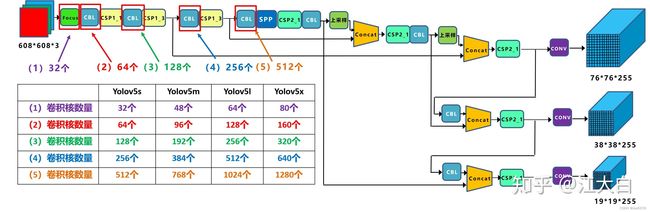
(2)width_multiple
此参数影响的是backbone中Focus结构和CBL结构中的卷积核个数。
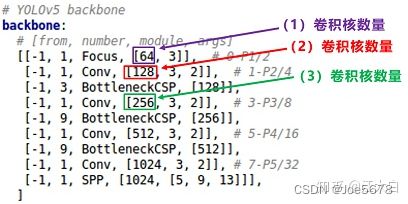
卷积核数量为上图中框中所示的数字乘以width_multiple。
主要参考文章及视频
深入浅出Yolo系列之Yolov5核心基础知识完整讲解
【最适合新手入门的【YOLOV5目标实战】教程!基于Pytorch搭建YOLOV5目标检测平台!环境部署+项目实战(深度学习/计算机视觉)-哔哩哔哩】