用s函数实现Lugre摩擦模型
目录
1. Lugre摩擦模型
2. Lugre摩擦模型的状态空间方程
3. Lugre摩擦模型的simulink建模
4. Lugre摩擦模型的s函数建模
5. simulink模型和s函数模型对比
6. Lugre摩擦模型的s函数源代码
1. Lugre摩擦模型
摩擦模型主要分为动态和静态摩擦模型。Lugre摩擦模型能够很好的反应出摩擦的静态和动态效应。Lugre摩擦模型:
![]() ①
①
![]() ②
②
其中![]() 为非线性函数:
为非线性函数:
![]() ③
③
| 参数 | 意义 | 本文取值 |
| 接触面相对角速度 | —— | |
| z | 鬃毛的平均形变 | —— |
 |
库伦摩擦力 | 2.4440 |
| 最大静摩擦力 | 0.5991 | |
 |
Stribeck速度 | 0.0103 |
| 鬃毛刚性系数 | 0.4766 | |
| 滑动阻尼系数 | 0.2701 | |
 |
黏性摩擦因数 | 0.0049 |
这些参数根据不同的系统取不同的值,且会在外界温度、润滑条件、材料磨损及接触面作用力等因素的影响下发生改变(取值方法:查论文,一般通过参数辨识来计算取值;以上取值仅为示例)
2. Lugre摩擦模型的状态空间方程
![]() ④
④
![]() ⑤
⑤
其中,T为离散采样时间,![]()
![]()
![]()
![]()
取状态变量:
![]() ⑥
⑥
则根据表达式④、⑤有状态方程:
⑦
根据表达式②有输出方程:
![]() ⑧
⑧
3. Lugre摩擦模型的simulink建模
根据表达式 ①②③搭建simulink仿真模型如图1所示:
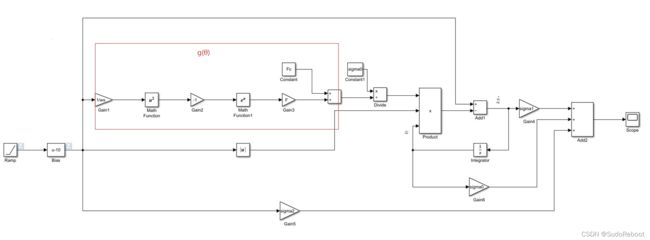 图1 Lugre的simulink仿真
图1 Lugre的simulink仿真
参数初始化:(按照表1中参数初始化,仿真前先运行init.m文件,将参数加载到工作空间)
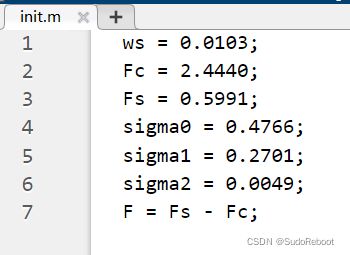 图2 参数初始化
图2 参数初始化
输入信号:
 图3 输入信号
图3 输入信号
输出波形:
 图4 输出波形
图4 输出波形
4. Lugre摩擦模型的s函数建模
根据表达式⑦⑧和表1中的参数编写s函数,取离散采样时间为0.001s:
⑨
![]() ⑩
⑩
离散变量、输入、输出设置:
sizes.NumDiscStates = 2; %离散变量个数
sizes.NumOutputs = 1; %输出个数
sizes.NumInputs = 1; %输入个数初始条件设置:
x0 = [0;0];采样时间设置:
ts = [0.001 0];表达式⑨:
function sys=mdlUpdate(t,x,u)
w = u(1);
gw = 2.4440 + (0.5991 - 2.4440)*exp(-(w/0.0103)^2);
sys = [1 0.001;-0.4766*((abs(w))/gw) 0]*x+[0;1]*w;表达式⑩:
function sys=mdlOutputs(t,x,u)
w = u(1);
sys = [0.4766 0.2701]*x+0.0049*w;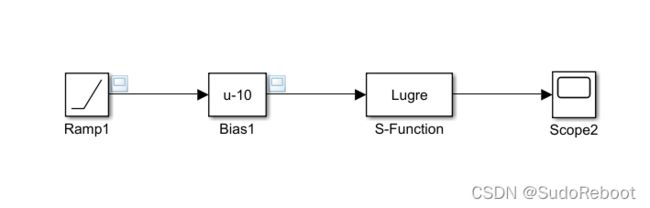 图5 s函数的Lugre仿真
图5 s函数的Lugre仿真
输入波形:
图6 输入信号
输出波形:
 图7 输出波形
图7 输出波形
5. simulink模型和s函数模型对比
 图8 simulink模型和s-function模型对比
图8 simulink模型和s-function模型对比
图8中上半部分为simulink模型,下半部分s-function模型
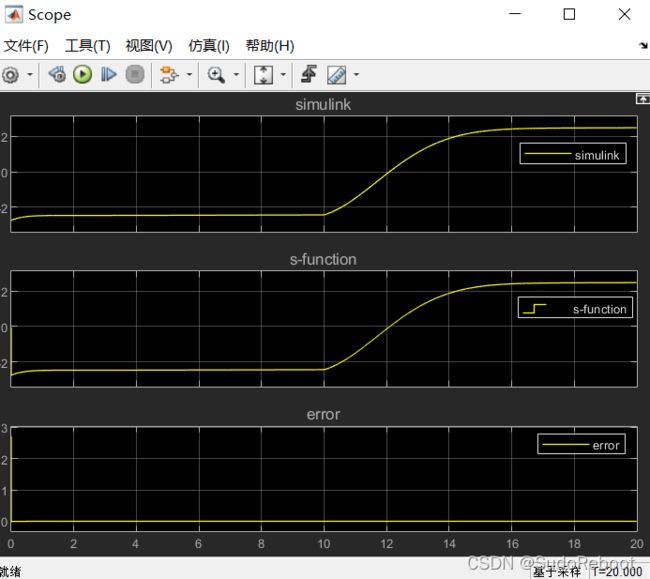 图9 仿真结果对比
图9 仿真结果对比
根据图9可知s函数模型和simulink模型输出波形基本一致。s函数离散变量的初始状态会影响0时刻的仿真值,修改s函数离散变量初始值会减小0时刻的误差。
x0 = [0;-10]; 图10 修改初始状态后的仿真结果
图10 修改初始状态后的仿真结果
误差在0.001级,可以忽略。
6. Lugre摩擦模型的s函数源代码
function [sys,x0,str,ts,simStateCompliance] = Lugre(t,x,u,flag)
switch flag
case 0 %初始化
[sys,x0,str,ts,simStateCompliance]=mdlInitializeSizes;
case 1 %计算连续状态的微分
sys=mdlDerivatives(t,x,u);
case 2 %计算下一个离散状态
sys=mdlUpdate(t,x,u);
case 3 %计算输出
sys=mdlOutputs(t,x,u);
case 4 %计算下一次采样的时间
sys=mdlGetTimeOfNextVarHit(t,x,u);
case 9 %系统结束
sys=mdlTerminate(t,x,u);
otherwise %其他情况
DAStudio.error('Simulink:blocks:unhandledFlag', num2str(flag));
end
%case 0:初始化
function [sys,x0,str,ts,simStateCompliance]=mdlInitializeSizes
sizes = simsizes; %用于设置模块参数的结构体
sizes.NumContStates = 0; %连续变量个数
sizes.NumDiscStates = 2; %离散变量个数
sizes.NumOutputs = 1; %输出个数
sizes.NumInputs = 1; %输入个数
sizes.DirFeedthrough = 1; %输入是否直接影响输出
sizes.NumSampleTimes = 1; %至少一个采样时间
sys = simsizes(sizes);
%初始化初始条件
x0 = [0;0];
%保留项
str = [];
% 初始化采样时间
ts = [0.001 0]; %[0 0] 连续采样
%[0 1] 小步长的连续采样
%[PERIOD OFFSET] 离散采用时间 [采样时间 步长]
%[-2 0] 变步长的采样时间 FLAG=4时获取下一次采样时间
%指定simStateCompliance块值
simStateCompliance = 'UnknownSimState'; %'UnknownSimState' 默认设置
%'DefaultSimState' 与内置块的模拟状态相同
%'HasNoSimState' 没有模拟状态
%'DisallowSimState' 保存或恢复模型模拟状态时出错
%case 1:计算连续状态的微分
%sys=AX+BU
function sys=mdlDerivatives(t,x,u)
sys = [];
%case 2:计算下一个离散状态
%sys=AX+BU
function sys=mdlUpdate(t,x,u)
w = u(1);
gw = 2.4440 + (0.5991 - 2.4440)*exp(-(w/0.0103)^2);
sys = [1 0.001;-0.4766*((abs(w))/gw) 0]*x+[0;1]*w;
%case 3:计算输出
%sys = CX+DU
function sys=mdlOutputs(t,x,u)
w = u(1);
sys = [0.4766 0.2701]*x+0.0049*w;
%case 4:计算下一次采样的时间[-2 0]时使用该函数
function sys=mdlGetTimeOfNextVarHit(t,x,u)
sampleTime = 0.01;
sys = t + sampleTime;
%case 9:系统结束
function sys=mdlTerminate(t,x,u)
sys = [];