GNSS-INS组合导航:KF-GINS(六)——配置文件
在data文件中需要准备四种文件
1、yaml配置文件(需要设置) 2、IMU文件 3、GNSS文件 4、truth文件(结果比对)
1、路径设置
# IMU和GNSS数据文件路径
# imudata and gnssdata filepath
imupath: "./dataset/Leador-A15.txt"
gnsspath: "./dataset/GNSS-RTK.txt"
# 输出文件夹路径
# output folder path
outputpath: "./dataset"
2、IMU信息
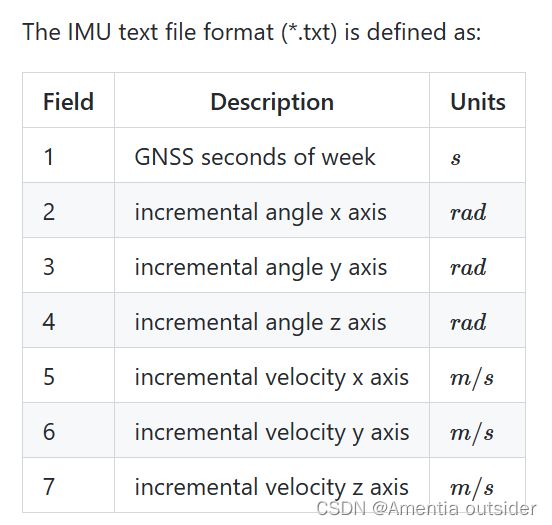
# IMU文件列数 (只会用前7列IMU数据)
# IMU data columns, only use the first seven columns
imudatalen: 7
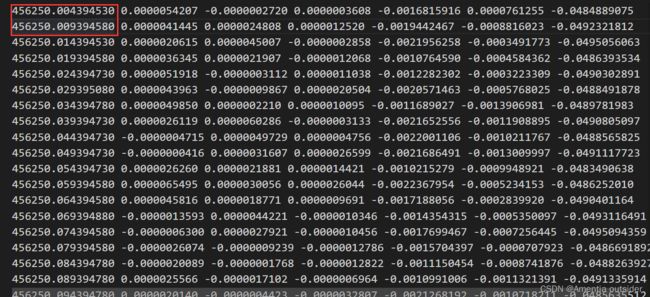
# IMU原始数据频率
# IMU datarate [Hz]
imudatarate: 200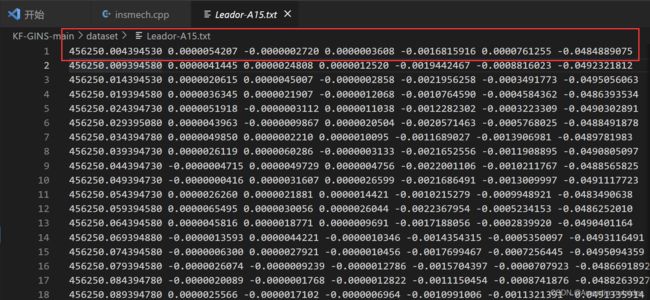
7行数据:分别对应以下信息
确定IMU原始数据频率:200,或者看IMU器件说明书
 3、时间设置
3、时间设置
# 处理时间段,结束时间设置为-1时则处理至IMU文件结束
# processing interval[s]
# process until the imufile end if set endtime to -1
starttime: 456300
endtime: -14、确定初始状态,可以根据truth设定
# 初始状态
# initial state
# 初始位置, 纬度 经度 高程
# initial position, latitude, longitude, altitude. [deg, deg, m]
initpos: [ 30.4447873701, 114.4718632047, 20.899 ]
# 初始速度, 北向速度, 东向速度, 垂向速度
# initial velocity, speed in the directions of north, east and down. [m/s, m/s, m/s]
initvel: [ 0.0, 0.0, 0.0 ]
# 初始姿态, 欧拉角(ZYX旋转顺序), 横滚, 俯仰, 航向
# initial attitude, euler angle(ZYX rotation), roll, pitch, yaw [deg, deg, deg]
initatt: [ 0.85421502, -2.03480295, 185.70235133 ]
# 初始IMU零偏和比例因子, IMU的三个轴(前、右、下)
# initial IMU bias and scale error, three axes of the imu (forward, right and down)
initgyrbias: [ 0, 0, 0 ] # [deg/h]
initaccbias: [ 0, 0, 0 ] # [mGal]
initgyrscale: [ 0, 0, 0 ] # [ppm]
initaccscale: [ 0, 0, 0 ] # [ppm]

5、设置初始状态标准差
# 初始状态标准差
# initial state std
# 初始位置标准差, 导航坐标系下 北向, 东向和垂向
# initial position std, north, east and down in n-frame. [m, m, m]
initposstd: [ 0.005, 0.004, 0.008 ]
# 初始速度标准差, 导航坐标系下北向、东向和垂向速度
# initial velocity std, north, east and down speed in n-frame. [m/s, m/s, m/s]
initvelstd: [ 0.003, 0.004, 0.004 ]
# 初始姿态标准差, 横滚、俯仰、航向角标准差
# initial attitude std, roll, pitch and yaw std. [deg, deg, deg]
initattstd: [ 0.003, 0.003, 0.023 ]6、IMU噪声建模参数
# IMU噪声建模参数, IMU的三个轴
# IMU noise parameters
imunoise:
arw: [0.003, 0.003, 0.003] # [deg/sqrt(hr)]
vrw: [0.03, 0.03, 0.03] # [m/s/sqrt(hr)]
gbstd: [0.027, 0.027, 0.027] # [deg/hr]
abstd: [15.0, 15.0, 15.0] # [mGal]
gsstd: [300.0, 300.0, 300.0] # [ppm]
asstd: [300.0, 300.0, 300.0] # [ppm]
corrtime: 4.0 # [hr]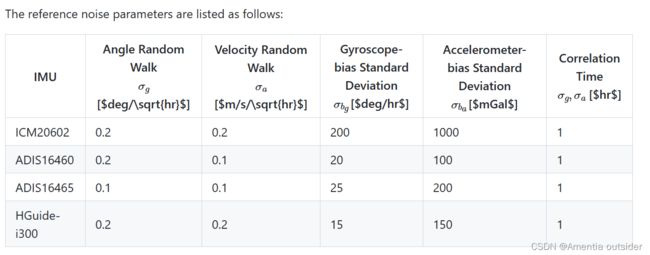
7、杆臂误差
# 天线杆臂, IMU坐标系前右下方向
# antenna lever, forward, right and down in the imu frame. [m]
antlever: [ 0.136, -0.301, -0.184 ]
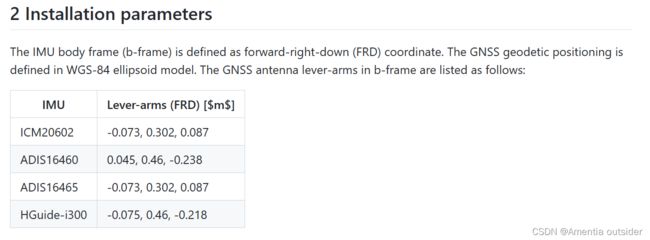
如果是用自己的设备测试需要提前标定
感谢武汉大学卫星导航定位技术研究中心多源智能导航实验室(i2Nav)牛小骥教授团队开源的KF-GINS软件平台。