玩转KITTI3D目标检测:KITTI评估工具evaluate的使用
近期因实验需要利用kitti数据集,发现关于评估工具使用的部分网上教程不够详细,特此记录.
文末为了方便对数据结果观看,附上了修改代码.
1. KITTI评估工具来源
官网评估工具

下载后文件目录包含:
- matlab(2D/3D框显示和demo文件)
- mapping
- cpp(评估的主要工具)
- readme.txt(说明文件)
为了方便调用和显示,将cpp文件夹中evaluate_object.cpp文件更换为文末代码.
2. 文件编译
(1)Cmake编译
进入cpp目录下,依次执行以下
cmake .
make
(2)gcc编译
g++ -O3 -DNDEBUG -o evaluate_object evaluate_object.cpp
3.程序调用
(1)准备label和results文件夹,文件目录如下
- label
- 00XXXX.txt
- results
- data
- 00XXXX.txt
- data
(2)评估
./evaluate_object label results
其中label和results分别代表路径
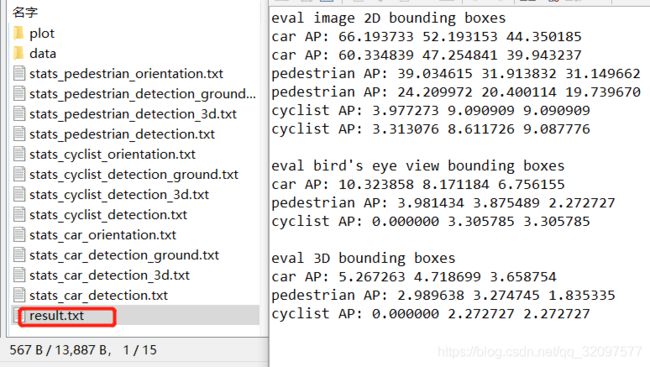
4.实验结果
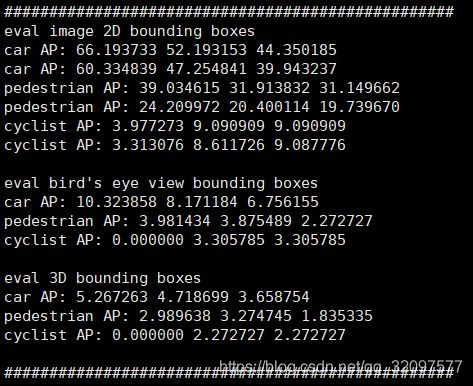
最终结果记录在result.txt文件中
附:修改的c++程序
#include