- 【iOS】MVC设计模式
Magnetic_h
iosmvc设计模式objective-c学习ui
MVC前言如何设计一个程序的结构,这是一门专门的学问,叫做"架构模式"(architecturalpattern),属于编程的方法论。MVC模式就是架构模式的一种。它是Apple官方推荐的App开发架构,也是一般开发者最先遇到、最经典的架构。MVC各层controller层Controller/ViewController/VC(控制器)负责协调Model和View,处理大部分逻辑它将数据从Mod
- OC语言多界面传值五大方式
Magnetic_h
iosui学习objective-c开发语言
前言在完成暑假仿写项目时,遇到了许多需要用到多界面传值的地方,这篇博客来总结一下比较常用的五种多界面传值的方式。属性传值属性传值一般用前一个界面向后一个界面传值,简单地说就是通过访问后一个视图控制器的属性来为它赋值,通过这个属性来做到从前一个界面向后一个界面传值。首先在后一个界面中定义属性@interfaceBViewController:UIViewController@propertyNSSt
- 微服务下功能权限与数据权限的设计与实现
nbsaas-boot
微服务java架构
在微服务架构下,系统的功能权限和数据权限控制显得尤为重要。随着系统规模的扩大和微服务数量的增加,如何保证不同用户和服务之间的访问权限准确、细粒度地控制,成为设计安全策略的关键。本文将讨论如何在微服务体系中设计和实现功能权限与数据权限控制。1.功能权限与数据权限的定义功能权限:指用户或系统角色对特定功能的访问权限。通常是某个用户角色能否执行某个操作,比如查看订单、创建订单、修改用户资料等。数据权限:
- Long类型前后端数据不一致
igotyback
前端
响应给前端的数据浏览器控制台中response中看到的Long类型的数据是正常的到前端数据不一致前后端数据类型不匹配是一个常见问题,尤其是当后端使用Java的Long类型(64位)与前端JavaScript的Number类型(最大安全整数为2^53-1,即16位)进行数据交互时,很容易出现精度丢失的问题。这是因为JavaScript中的Number类型无法安全地表示超过16位的整数。为了解决这个问
- 扫地机类清洁产品之直流无刷电机控制
悟空胆好小
清洁服务机器人单片机人工智能
扫地机类清洁产品之直流无刷电机控制1.1前言扫地机产品有很多的电机控制,滚刷电机1个,边刷电机1-2个,清水泵电机,风机一个,部分中高端产品支持抹布功能,也就是存在抹布盘电机,还有追觅科沃斯石头等边刷抬升电机,滚刷抬升电机等的,这些电机有直流有刷电机,直接无刷电机,步进电机,电磁阀,挪动泵等不同类型。电机的原理,驱动控制方式也不行。接下来一段时间的几个文章会作个专题分析分享。直流有刷电机会自动持续
- 高级编程--XML+socket练习题
masa010
java开发语言
1.北京华北2114.8万人上海华东2,500万人广州华南1292.68万人成都华西1417万人(1)使用dom4j将信息存入xml中(2)读取信息,并打印控制台(3)添加一个city节点与子节点(4)使用socketTCP协议编写服务端与客户端,客户端输入城市ID,服务器响应相应城市信息(5)使用socketTCP协议编写服务端与客户端,客户端要求用户输入city对象,服务端接收并使用dom4j
- 每日一题——第八十一题
互联网打工人no1
C语言程序设计每日一练c语言
打印如下图案:#includeintmain(){inti,j;charch='A';for(i=1;i<5;i++,ch++){for(j=0;j<5-i;j++){printf("");//控制空格输出}for(j=1;j<2*i;j++)//条件j<2*i{printf("%c",ch);//控制字符输出}printf("\n");}return0;}
- 每日一题——第八十二题
互联网打工人no1
C语言程序设计每日一练c语言
题目:将一个控制台输入的字符串中的所有元音字母复制到另一字符串中#include#include#include#include#defineMAX_INPUT1024boolisVowel(charp);intmain(){charinput[MAX_INPUT];charoutput[MAX_INPUT];printf("请输入一串字符串:\n");fgets(input,sizeof(inp
- Goolge earth studio 进阶4——路径修改与平滑
陟彼高冈yu
Googleearthstudio进阶教程旅游
如果我们希望在大约中途时获得更多的城市鸟瞰视角。可以将相机拖动到这里并创建一个新的关键帧。camera_target_clip_7EarthStudio会自动平滑我们的路径,所以当我们通过这个关键帧时,不是一个生硬的角度,而是一个平滑的曲线。camera_target_clip_8路径上有贝塞尔控制手柄,允许我们调整路径的形状。右键单击,我们可以选择“平滑路径”,这是默认的自动平滑算法,或者我们可
- 如果做到轻松在股市赚钱?只要坚持这三个原则。
履霜之人
大A股里向来就有七亏二平一赚的说法,能赚钱的都是少数人。否则股市就成了慈善机构,人人都有钱赚,谁还要上班?所以说亏钱是正常的,或者说是应该的。那么那些赚钱的人又是如何做到的呢?普通人能不能找到捷径去分一杯羹呢?方法是有的,但要做到需要你有极高的自律。第一,控制仓位,散户最大的问题是追涨杀跌,只要涨起来,就把钱往股票上砸,然后被套,隔天跌的受不了,又一刀切,全部割肉。来来回回间,遍体鳞伤。所以散户首
- GitHub上克隆项目
bigbig猩猩
github
从GitHub上克隆项目是一个简单且直接的过程,它允许你将远程仓库中的项目复制到你的本地计算机上,以便进行进一步的开发、测试或学习。以下是一个详细的步骤指南,帮助你从GitHub上克隆项目。一、准备工作1.安装Git在克隆GitHub项目之前,你需要在你的计算机上安装Git工具。Git是一个开源的分布式版本控制系统,用于跟踪和管理代码变更。你可以从Git的官方网站(https://git-scm.
- log4j配置
yy爱yy
#log4j.rootLogger配置的是大于等于当前级别的日志信息的输出#log4j.rootLogger用法:(注意appenderName可以是一个或多个)#log4j.rootLogger=日志级别,appenderName1,appenderName2,....#log4j.appender.appenderName2定义的是日志的输出方式,有两种:一种是命令行输出或者叫控制台输出,另一
- CX8836:小体积大功率升降压方案推荐(附Demo设计指南)
诚芯微科技
社交电子
CX8836是一颗同步四开关单向升降压控制器,在4.5V-40V宽输入电压范围内稳定工作,持续负载电流10A,能够在输入高于或低于输出电压时稳定调节输出电压,可适用于USBPD快充、车载充电器、HUB、汽车启停系统、工业PC电源等多种升降压应用场合,为大功率TYPE-CPD车载充电器提供最优解决方案。提供CX8836Demo测试、CX8836样品申请及CX8836方案开发技术支持。CX8836同升
- 01-Git初识
Meereen
Gitgit
01-Git初识概念:一个免费开源,分布式的代码版本控制系统,帮助开发团队维护代码作用:记录代码内容。切换代码版本,多人开发时高效合并代码内容如何学:个人本机使用:Git基础命令和概念多人共享使用:团队开发同一个项目的代码版本管理Git配置用户信息配置:用户名和邮箱,应用在每次提交代码版本时表明自己的身份命令:查看git版本号git-v配置用户名gitconfig--globaluser.name
- 基于CODESYS的多轴运动控制程序框架:逻辑与运动控制分离,快速开发灵活操作
GPJnCrbBdl
python开发语言
基于codesys开发的多轴运动控制程序框架,将逻辑与运动控制分离,将单轴控制封装成功能块,对该功能块的操作包含了所有的单轴控制(归零、点动、相对定位、绝对定位、设置当前位置、伺服模式切换等等)。程序框架由主程序按照状态调用分归零模式、手动模式、自动模式、故障模式,程序状态的跳转都已完成,只需要根据不同的工艺要求完成所需的动作即可。变量的声明、地址的规划都严格按照C++的标准定义,能帮助开发者快速
- Rust基础知识
GRKF15
rust开发语言后端
1.Rust语言简介1.1基础语法变量声明:let关键字用于声明变量,可以指定或不指定类型,如leta=10;和letmutc=30i32;。函数定义:使用fn关键字定义函数,并指定参数类型及返回类型,如fnadd(i:i32,j:i32)->i32{i+j}。控制流:包括if、else等,控制语句后需要使用;来结束语句。1.2数据类型整数类型:i8、i16、i32、i64、i128,以及无符号的
- xilinx vivado PULLMODE 设置思路
坚持每天写程序
fpga开发
1.xilinx引脚分类XilinxIO的分类:以XC7A100TFGG484为例,其引脚分类如下:1.UserIO(用户IO):用户使用的普通IO1.1专用(Dedicated)IO:命名为IO_LXXY_#、IO_XX_#的引脚,有固定的特定用途,多为底层特定功能的直接实现,如差分对信号、关键控制信号等,不能随意变更。1.2多功能(Multi-Function)IO:命名为IO_LXXY_ZZ
- 读书笔记|《遇见孩子,遇见更好的自己》5
抹茶社长
为人父母意味着放弃自己的过去,不要对以往没有实现的心愿耿耿于怀,只有这样,孩子们才能做回自己。985909803.jpg孩子在与父母保持亲密的同时更需要独立,唯有这样,孩子才会成为孩子,父母才会成其为父母。有耐心的人生往往更幸福,给孩子留点余地。认识到养儿育女是对耐心的考验。为失败做好心理准备,教会孩子控制情绪。了解自己的底线,说到底线,有一点很重要,父母之所以发脾气,真正的原因往往在于他们自己,
- 《吹牛大王历险记》读书随笔
赵炳森
这本书的作者是埃·拉斯伯戈·毕尔格。(没查到相关内容,好像他只写过《吹牛大王历险记》。)最让人百思不得其解的是他居然能自己拉自己的辫子出泥潭?!我觉得自己拉自己的辫子只会把自己的辫子拉断,而不会飞出泥潭。(问:图片中底下的屁股为什么插了一根钢针?)屁股底下居然有根钢针?在泥潭应该是滑滑的吧,可是他怎么能夹紧马肚呢?马肚子应该是在马的下方。还有如果能从泥潭里把连人带马都给拽出来的话,他力气肯定很大,
- 白骑士的Java教学基础篇 2.5 控制流语句
白骑士所长
Java教学java开发语言
欢迎继续学习Java编程的基础篇!在前面的章节中,我们了解了Java的变量、数据类型和运算符。接下来,我们将探讨Java中的控制流语句。控制流语句用于控制程序的执行顺序,使我们能够根据特定条件执行不同的代码块,或重复执行某段代码。这是编写复杂程序的基础。通过学习这一节内容,你将掌握如何使用条件语句和循环语句来编写更加灵活和高效的代码。条件语句条件语句用于根据条件的真假来执行不同的代码块。if语句‘
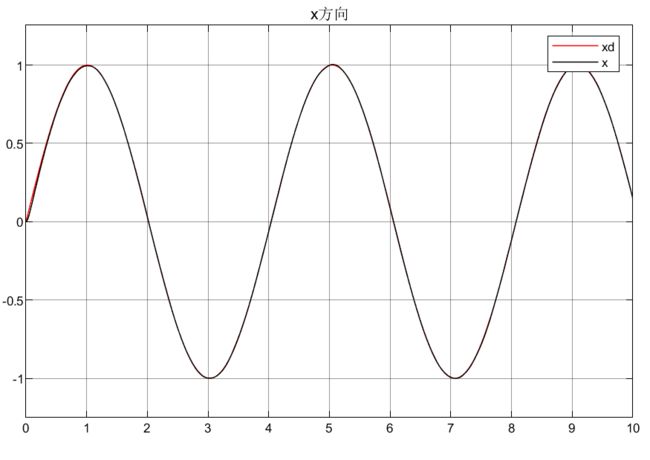
- 如何用matlab灵活控制feko的求解
NingrLi
matlab开发语言
https://bbs.rfeda.cn/read.php?tid=3778Feko中的模型和求解设置等都可以通过editfeko进行设置,其文件存储为.pre文件,该文件可以用文本打开,因此,我们可以通过VB、VC、matlab等工具对.pre文件进行读写操作,以达到更灵活的使用feko。同样,对于.out文件,我们也可以进行读操作。熟练使用对.pre文件和.out文件的操作后,我们可以方便的计
- ARMv8 Debug
__pop_
ARMv8ARM64架构linux运维
内容来自DEN0024A_v8_architecture_PG.pdf本质ARMv8Debug是什么历史在ARMv4开始被引入,并已发展成一系列广泛的调试(debug1)和跟踪(trace)功能ARMv6和ARMv7-a新增了自托管调试(debug2)和性能评测(trace-enhance)ARMv8处理器提供硬件功能侵入式:调试工具能够对核心活动提供显著级别的控制非侵入式:以非侵入性方式收集有关
- SpringCloudAlibaba—Sentinel(限流)
菜鸟爪哇
前言:自己在学习过程的记录,借鉴别人文章,记录自己实现的步骤。借鉴文章:https://blog.csdn.net/u014494148/article/details/105484410Sentinel介绍Sentinel诞生于阿里巴巴,其主要目标是流量控制和服务熔断。Sentinel是通过限制并发线程的数量(即信号隔离)来减少不稳定资源的影响,而不是使用线程池,省去了线程切换的性能开销。当资源
- 计算机木马详细编写思路
小熊同学哦
php开发语言木马木马思路
导语:计算机木马(ComputerTrojan)是一种恶意软件,通过欺骗用户从而获取系统控制权限,给黑客打开系统后门的一种手段。虽然木马的存在给用户和系统带来严重的安全风险,但是了解它的工作原理与编写思路,对于我们提高防范意识、构建更健壮的网络安全体系具有重要意义。本篇博客将深入剖析计算机木马的详细编写思路,以及如何复杂化挑战,以期提高读者对计算机木马的认识和对抗能力。计算机木马的基本原理计算机木
- uniapp map组件自定义markers标记点
以对_
uni-app学习记录uni-appjavascript前端
需求是根据后端返回数据在地图上显示标记点,并且根据数据状态控制标记点颜色,标记点背景通过两张图片实现控制{{item.options.labelName}}exportdefault{data(){return{storeIndex:0,locaInfo:{longitude:120.445172,latitude:36.111387},markers:[//标点列表{id:1,//标记点idin
- 基于STM32与Qt的自动平衡机器人:从控制到人机交互的的详细设计流程
极客小张
stm32qt机器人物联网人机交互毕业设计c语言
一、项目概述目标和用途本项目旨在开发一款基于STM32控制的自动平衡机器人,结合步进电机和陀螺仪传感器,实现对平衡机器人的精确控制。该机器人可以用于教育、科研、娱乐等多个领域,帮助用户了解自动控制、机器人运动学等相关知识。技术栈关键词STM32单片机步进电机陀螺仪传感器AD采集电路Qt人机界面实时数据监控二、系统架构系统架构设计本项目的系统架构设计包括以下主要组件:控制单元:STM32单片机传感器
- 基于STM32的汽车仪表显示系统:集成CAN、UART与I2C总线设计流程
极客小张
stm32汽车嵌入式硬件物联网单片机c语言
一、项目概述项目目标与用途本项目旨在设计和实现一个基于STM32微控制器的汽车仪表显示系统。该系统能够实时显示汽车的速度、转速、油量等关键信息,并通过CAN总线与其他汽车控制单元进行通信。这种仪表显示系统不仅提高了驾驶的安全性和便捷性,还能为汽车提供更智能的用户体验。技术栈关键词微控制器:STM32显示技术:TFTLCD/OLED传感器:速度传感器、温度传感器、油量传感器通信协议:CAN总线、UA
- Spring Boot中实现跨域请求
BABA8891
springboot后端java
在SpringBoot中实现跨域请求(CORS,Cross-OriginResourceSharing)可以通过多种方式,以下是几种常见的方法:1.使用@CrossOrigin注解在SpringBoot中,你可以在控制器或者具体的请求处理方法上使用@CrossOrigin注解来允许跨域请求。在控制器上应用:importorg.springframework.web.bind.annotation.
- 担心
小蓦
移植之后是各种担心,担心自己吃错了东西,吃的外卖不营养,肚子不舒服就担心是不是有什么问题。我知道这种担心无济于事,还影响自己的情绪,对身体也不好,可就是控制不了自己。昨晚半夜,肚子抽动了一下,突然就睡不着了。各种担心接踵而来。老公也醒了。他问我怎么了,我说肚子不舒服,害怕。他说,现在担心害怕也没用。该来的总会来,要走的怎么挽留也没有用。道理我总是懂得的。可是经历了这么多,付出了这么多,说不害怕,不
- 2019-04-10
shuaigefeng
姓名:王林锋企业名称:三亚蔚蓝时代实业有限公司组别:420期努力6组【日精进打卡251天】【知~学习、诵读】《六项精进》2遍,累计256遍《大学》2遍,累计220遍【经典分享】1、想过成功、想过失败、也想过放弃。【行~实践】一、修身:(对自己个人)1.拍打腿部两侧50下,舌顶上颚50下。2.坚持诵读、阅读。3.坚持锻炼、按时睡觉起床。4.控制健康饮食,饭后走动30分钟。5.每天反省自己的思想和行为
- 多线程编程之join()方法
周凡杨
javaJOIN多线程编程线程
现实生活中,有些工作是需要团队中成员依次完成的,这就涉及到了一个顺序问题。现在有T1、T2、T3三个工人,如何保证T2在T1执行完后执行,T3在T2执行完后执行?问题分析:首先问题中有三个实体,T1、T2、T3, 因为是多线程编程,所以都要设计成线程类。关键是怎么保证线程能依次执行完呢?
Java实现过程如下:
public class T1 implements Runnabl
- java中switch的使用
bingyingao
javaenumbreakcontinue
java中的switch仅支持case条件仅支持int、enum两种类型。
用enum的时候,不能直接写下列形式。
switch (timeType) {
case ProdtransTimeTypeEnum.DAILY:
break;
default:
br
- hive having count 不能去重
daizj
hive去重having count计数
hive在使用having count()是,不支持去重计数
hive (default)> select imei from t_test_phonenum where ds=20150701 group by imei having count(distinct phone_num)>1 limit 10;
FAILED: SemanticExcep
- WebSphere对JSP的缓存
周凡杨
WAS JSP 缓存
对于线网上的工程,更新JSP到WebSphere后,有时会出现修改的jsp没有起作用,特别是改变了某jsp的样式后,在页面中没看到效果,这主要就是由于websphere中缓存的缘故,这就要清除WebSphere中jsp缓存。要清除WebSphere中JSP的缓存,就要找到WAS安装后的根目录。
现服务
- 设计模式总结
朱辉辉33
java设计模式
1.工厂模式
1.1 工厂方法模式 (由一个工厂类管理构造方法)
1.1.1普通工厂模式(一个工厂类中只有一个方法)
1.1.2多工厂模式(一个工厂类中有多个方法)
1.1.3静态工厂模式(将工厂类中的方法变成静态方法)
&n
- 实例:供应商管理报表需求调研报告
老A不折腾
finereport报表系统报表软件信息化选型
引言
随着企业集团的生产规模扩张,为支撑全球供应链管理,对于供应商的管理和采购过程的监控已经不局限于简单的交付以及价格的管理,目前采购及供应商管理各个环节的操作分别在不同的系统下进行,而各个数据源都独立存在,无法提供统一的数据支持;因此,为了实现对于数据分析以提供采购决策,建立报表体系成为必须。 业务目标
1、通过报表为采购决策提供数据分析与支撑
2、对供应商进行综合评估以及管理,合理管理和
- mysql
林鹤霄
转载源:http://blog.sina.com.cn/s/blog_4f925fc30100rx5l.html
mysql -uroot -p
ERROR 1045 (28000): Access denied for user 'root'@'localhost' (using password: YES)
[root@centos var]# service mysql
- Linux下多线程堆栈查看工具(pstree、ps、pstack)
aigo
linux
原文:http://blog.csdn.net/yfkiss/article/details/6729364
1. pstree
pstree以树结构显示进程$ pstree -p work | grep adsshd(22669)---bash(22670)---ad_preprocess(4551)-+-{ad_preprocess}(4552) &n
- html input与textarea 值改变事件
alxw4616
JavaScript
// 文本输入框(input) 文本域(textarea)值改变事件
// onpropertychange(IE) oninput(w3c)
$('input,textarea').on('propertychange input', function(event) {
console.log($(this).val())
});
- String类的基本用法
百合不是茶
String
字符串的用法;
// 根据字节数组创建字符串
byte[] by = { 'a', 'b', 'c', 'd' };
String newByteString = new String(by);
1,length() 获取字符串的长度
&nbs
- JDK1.5 Semaphore实例
bijian1013
javathreadjava多线程Semaphore
Semaphore类
一个计数信号量。从概念上讲,信号量维护了一个许可集合。如有必要,在许可可用前会阻塞每一个 acquire(),然后再获取该许可。每个 release() 添加一个许可,从而可能释放一个正在阻塞的获取者。但是,不使用实际的许可对象,Semaphore 只对可用许可的号码进行计数,并采取相应的行动。
S
- 使用GZip来压缩传输量
bijian1013
javaGZip
启动GZip压缩要用到一个开源的Filter:PJL Compressing Filter。这个Filter自1.5.0开始该工程开始构建于JDK5.0,因此在JDK1.4环境下只能使用1.4.6。
PJL Compressi
- 【Java范型三】Java范型详解之范型类型通配符
bit1129
java
定义如下一个简单的范型类,
package com.tom.lang.generics;
public class Generics<T> {
private T value;
public Generics(T value) {
this.value = value;
}
}
- 【Hadoop十二】HDFS常用命令
bit1129
hadoop
1. 修改日志文件查看器
hdfs oev -i edits_0000000000000000081-0000000000000000089 -o edits.xml
cat edits.xml
修改日志文件转储为xml格式的edits.xml文件,其中每条RECORD就是一个操作事务日志
2. fsimage查看HDFS中的块信息等
&nb
- 怎样区别nginx中rewrite时break和last
ronin47
在使用nginx配置rewrite中经常会遇到有的地方用last并不能工作,换成break就可以,其中的原理是对于根目录的理解有所区别,按我的测试结果大致是这样的。
location /
{
proxy_pass http://test;
- java-21.中兴面试题 输入两个整数 n 和 m ,从数列 1 , 2 , 3.......n 中随意取几个数 , 使其和等于 m
bylijinnan
java
import java.util.ArrayList;
import java.util.List;
import java.util.Stack;
public class CombinationToSum {
/*
第21 题
2010 年中兴面试题
编程求解:
输入两个整数 n 和 m ,从数列 1 , 2 , 3.......n 中随意取几个数 ,
使其和等
- eclipse svn 帐号密码修改问题
开窍的石头
eclipseSVNsvn帐号密码修改
问题描述:
Eclipse的SVN插件Subclipse做得很好,在svn操作方面提供了很强大丰富的功能。但到目前为止,该插件对svn用户的概念极为淡薄,不但不能方便地切换用户,而且一旦用户的帐号、密码保存之后,就无法再变更了。
解决思路:
删除subclipse记录的帐号、密码信息,重新输入
- [电子商务]传统商务活动与互联网的结合
comsci
电子商务
某一个传统名牌产品,过去销售的地点就在某些特定的地区和阶层,现在进入互联网之后,用户的数量群突然扩大了无数倍,但是,这种产品潜在的劣势也被放大了无数倍,这种销售利润与经营风险同步放大的效应,在最近几年将会频繁出现。。。。
如何避免销售量和利润率增加的
- java 解析 properties-使用 Properties-可以指定配置文件路径
cuityang
javaproperties
#mq
xdr.mq.url=tcp://192.168.100.15:61618;
import java.io.IOException;
import java.util.Properties;
public class Test {
String conf = "log4j.properties";
private static final
- Java核心问题集锦
darrenzhu
java基础核心难点
注意,这里的参考文章基本来自Effective Java和jdk源码
1)ConcurrentModificationException
当你用for each遍历一个list时,如果你在循环主体代码中修改list中的元素,将会得到这个Exception,解决的办法是:
1)用listIterator, 它支持在遍历的过程中修改元素,
2)不用listIterator, new一个
- 1分钟学会Markdown语法
dcj3sjt126com
markdown
markdown 简明语法 基本符号
*,-,+ 3个符号效果都一样,这3个符号被称为 Markdown符号
空白行表示另起一个段落
`是表示inline代码,tab是用来标记 代码段,分别对应html的code,pre标签
换行
单一段落( <p>) 用一个空白行
连续两个空格 会变成一个 <br>
连续3个符号,然后是空行
- Gson使用二(GsonBuilder)
eksliang
jsongsonGsonBuilder
转载请出自出处:http://eksliang.iteye.com/blog/2175473 一.概述
GsonBuilder用来定制java跟json之间的转换格式
二.基本使用
实体测试类:
温馨提示:默认情况下@Expose注解是不起作用的,除非你用GsonBuilder创建Gson的时候调用了GsonBuilder.excludeField
- 报ClassNotFoundException: Didn't find class "...Activity" on path: DexPathList
gundumw100
android
有一个工程,本来运行是正常的,我想把它移植到另一台PC上,结果报:
java.lang.RuntimeException: Unable to instantiate activity ComponentInfo{com.mobovip.bgr/com.mobovip.bgr.MainActivity}: java.lang.ClassNotFoundException: Didn't f
- JavaWeb之JSP指令
ihuning
javaweb
要点
JSP指令简介
page指令
include指令
JSP指令简介
JSP指令(directive)是为JSP引擎而设计的,它们并不直接产生任何可见输出,而只是告诉引擎如何处理JSP页面中的其余部分。
JSP指令的基本语法格式:
<%@ 指令 属性名="
- mac上编译FFmpeg跑ios
啸笑天
ffmpeg
1、下载文件:https://github.com/libav/gas-preprocessor, 复制gas-preprocessor.pl到/usr/local/bin/下, 修改文件权限:chmod 777 /usr/local/bin/gas-preprocessor.pl
2、安装yasm-1.2.0
curl http://www.tortall.net/projects/yasm
- sql mysql oracle中字符串连接
macroli
oraclesqlmysqlSQL Server
有的时候,我们有需要将由不同栏位获得的资料串连在一起。每一种资料库都有提供方法来达到这个目的:
MySQL: CONCAT()
Oracle: CONCAT(), ||
SQL Server: +
CONCAT() 的语法如下:
Mysql 中 CONCAT(字串1, 字串2, 字串3, ...): 将字串1、字串2、字串3,等字串连在一起。
请注意,Oracle的CON
- Git fatal: unab SSL certificate problem: unable to get local issuer ce rtificate
qiaolevip
学习永无止境每天进步一点点git纵观千象
// 报错如下:
$ git pull origin master
fatal: unable to access 'https://git.xxx.com/': SSL certificate problem: unable to get local issuer ce
rtificate
// 原因:
由于git最新版默认使用ssl安全验证,但是我们是使用的git未设
- windows命令行设置wifi
surfingll
windowswifi笔记本wifi
还没有讨厌无线wifi的无尽广告么,还在耐心等待它慢慢启动么
教你命令行设置 笔记本电脑wifi:
1、开启wifi命令
netsh wlan set hostednetwork mode=allow ssid=surf8 key=bb123456
netsh wlan start hostednetwork
pause
其中pause是等待输入,可以去掉
2、
- Linux(Ubuntu)下安装sysv-rc-conf
wmlJava
linuxubuntusysv-rc-conf
安装:sudo apt-get install sysv-rc-conf 使用:sudo sysv-rc-conf
操作界面十分简洁,你可以用鼠标点击,也可以用键盘方向键定位,用空格键选择,用Ctrl+N翻下一页,用Ctrl+P翻上一页,用Q退出。
背景知识
sysv-rc-conf是一个强大的服务管理程序,群众的意见是sysv-rc-conf比chkconf
- svn切换环境,重发布应用多了javaee标签前缀
zengshaotao
javaee
更换了开发环境,从杭州,改变到了上海。svn的地址肯定要切换的,切换之前需要将原svn自带的.svn文件信息删除,可手动删除,也可通过废弃原来的svn位置提示删除.svn时删除。
然后就是按照最新的svn地址和规范建立相关的目录信息,再将原来的纯代码信息上传到新的环境。然后再重新检出,这样每次修改后就可以看到哪些文件被修改过,这对于增量发布的规范特别有用。
检出