深度强化学习-A3C算法
论文地址:https://arxiv.org/pdf/1602.01783v1.pdf
A3C(异步优势演员评论家)算法,设计该算法的目的是找到能够可靠的训练深度神经网络,且不需要大量资源的RL算法。
在DQN算法中,为了方便收敛使用了经验回放的技巧。A3C更进一步,并克服了一些经验回放的问题。如,回放池经验数据相关性太强,用于训练的时候效果很可能不佳。举个例子,我们学习下棋,总是和同一个人下,期望能提高棋艺。这当然是可行的,但是到一定程度就再难提高了,此时最好的方法是另寻高手切磋。
A3C也是基于此思路,利用多线程的方法,同时在多个线程里面分别和环境进行交互学习,每个线程都把学习的经验汇总起来,整理保存在一个公共的地方。并且,定期从公共的地方把其他线程的学习经验拿回来,指导自己和环境的学习交互。
A3C解决了Actor-Critic难以收敛的问题,更重要的是,提供了一种通用的异步的并发的强化学习框架,也就是说,这个并发框架不光可以用于A3C,还可以用于其他的强化学习算法。这是A3C最大的贡献。目前,已经有基于GPU的A3C框架,这样A3C的框架训练速度就更快了。除了A3C, DDPG算法也可以改善Actor-Critic难收敛的问题。它使用了Nature DQN,DDQN类似的思想,用两个Actor网络,两个Critic网络,一共4个神经网络来迭代更新模型参数。
基于经验回放有以下几个缺点:
- 每次实际交互使用需要更多的内存和计算
- 需要能够从旧策略生成的数据进行更新的异策略学些算法
A3C的优点:
- 可以不需要依赖GPU的算力,仅用多核CPU
- 在atari 2600环境中的许多游戏都取得了更好的结果
- 相较以前使用GPU的算法,A3C计算时间短,资源消耗少
- 可应用于离散和连续动作空间的任务
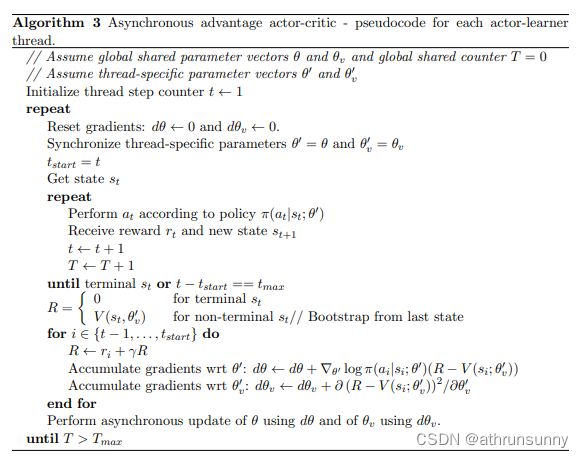
算法流程
算法伪代码
代码实现(部分)
model:
class ActorCritic(torch.nn.Module):
def __init__(self, num_inputs, action_space):
super(ActorCritic, self).__init__()
self.conv1 = nn.Conv2d(num_inputs, 32, 3, stride=2, padding=1)
self.conv2 = nn.Conv2d(32, 32, 3, stride=2, padding=1)
self.conv3 = nn.Conv2d(32, 32, 3, stride=2, padding=1)
self.conv4 = nn.Conv2d(32, 32, 3, stride=2, padding=1)
self.lstm = nn.LSTMCell(32 * 3 * 3, 256)
num_outputs = action_space.n
self.critic_linear = nn.Linear(256, 1)
self.actor_linear = nn.Linear(256, num_outputs)
self.apply(weights_init)
self.actor_linear.weight.data = normalized_columns_initializer(
self.actor_linear.weight.data, 0.01)
self.actor_linear.bias.data.fill_(0)
self.critic_linear.weight.data = normalized_columns_initializer(
self.critic_linear.weight.data, 1.0)
self.critic_linear.bias.data.fill_(0)
self.lstm.bias_ih.data.fill_(0)
self.lstm.bias_hh.data.fill_(0)
self.train()
def forward(self, inputs):
inputs, (hx, cx) = inputs
x = F.elu(self.conv1(inputs))
x = F.elu(self.conv2(x))
x = F.elu(self.conv3(x))
x = F.elu(self.conv4(x))
x = x.view(-1, 32 * 3 * 3)
hx, cx = self.lstm(x, (hx, cx))
x = hx
return self.critic_linear(x), self.actor_linear(x), (hx, cx)这里使用的LSTM的版本,当然也可以替换成CNN版本
train:
def train(rank, args, shared_model, counter, lock, optimizer=None):
torch.manual_seed(args.seed + rank)
env = create_atari_env(args.env_name)
env.seed(args.seed + rank)
model = ActorCritic(env.observation_space.shape[0], env.action_space)
if optimizer is None:
optimizer = optim.Adam(shared_model.parameters(), lr=args.lr)
model.train()
state = env.reset()
state = torch.from_numpy(state)
done = True
episode_length = 0
while True:
# Sync with the shared model
model.load_state_dict(shared_model.state_dict())
if done:
cx = torch.zeros(1, 256)
hx = torch.zeros(1, 256)
else:
cx = cx.detach()
hx = hx.detach()
values = []
log_probs = []
rewards = []
entropies = []
env.render()
for step in range(args.num_steps):
episode_length += 1
value, logit, (hx, cx) = model((state.unsqueeze(0),
(hx, cx)))
prob = F.softmax(logit, dim=-1)
log_prob = F.log_softmax(logit, dim=-1)
entropy = -(log_prob * prob).sum(1, keepdim=True)
entropies.append(entropy)
action = prob.multinomial(num_samples=1).detach()
log_prob = log_prob.gather(1, action)
state, reward, done, _ = env.step(action.numpy())
done = done or episode_length >= args.max_episode_length
reward = max(min(reward, 1), -1)
with lock:
counter.value += 1
if done:
episode_length = 0
state = env.reset()
state = torch.from_numpy(state)
values.append(value)
log_probs.append(log_prob)
rewards.append(reward)
if done:
break
R = torch.zeros(1, 1)
if not done:
value, _, _ = model((state.unsqueeze(0), (hx, cx)))
R = value.detach()
values.append(R)
policy_loss = 0
value_loss = 0
gae = torch.zeros(1, 1)
for i in reversed(range(len(rewards))):
R = args.gamma * R + rewards[i]
advantage = R - values[i]
value_loss = value_loss + 0.5 * advantage.pow(2)
# Generalized Advantage Estimation
delta_t = rewards[i] + args.gamma * \
values[i + 1] - values[i]
gae = gae * args.gamma * args.gae_lambda + delta_t
policy_loss = policy_loss - \
log_probs[i] * gae.detach() - args.entropy_coef * entropies[i]
optimizer.zero_grad()
(policy_loss + args.value_loss_coef * value_loss).backward()
torch.nn.utils.clip_grad_norm_(model.parameters(), args.max_grad_norm)
ensure_shared_grads(model, shared_model)
optimizer.step()
main函数:
if __name__ == '__main__':
args = parser.parse_args()
torch.manual_seed(args.seed)
env = create_atari_env(args.env_name)
shared_model = ActorCritic(
env.observation_space.shape[0], env.action_space)
shared_model.share_memory()
if args.no_shared:
optimizer = None
else:
optimizer = my_optim.SharedAdam(shared_model.parameters(), lr=args.lr)
optimizer.share_memory()
processes = []
counter = mp.Value('i', 0)
lock = mp.Lock()
p = mp.Process(target=test, args=(args.num_processes, args, shared_model, counter))
p.start()
processes.append(p)
for rank in range(0, args.num_processes):
p = mp.Process(target=train, args=(rank, args, shared_model, counter, lock, optimizer))
p.start()
processes.append(p)
for p in processes:
p.join()算法图解
待更新