1-第1章 第1节-五次多项式-会用公式就行
第一章:数学
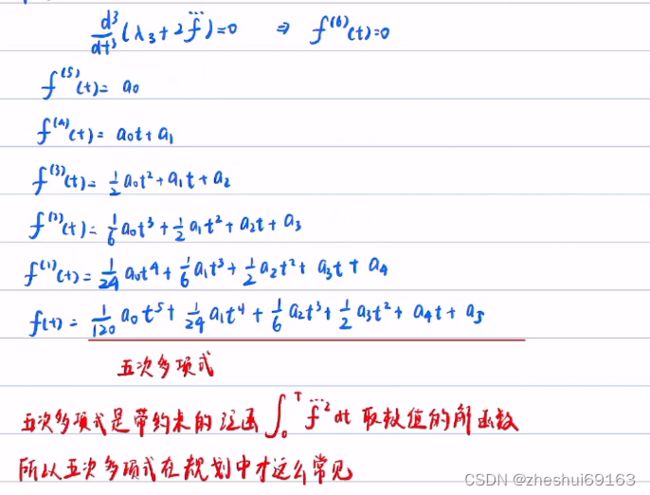
第一节、五次多项式(这个推导可以看一下我手写的笔记!!!)
1. 舒适性指标:跃度:Jerk=加速度关于时间的导数(Jerk绝对值越小=a变化越平缓=越舒适)
假设质点的轨迹s=f(t)_这里要想象一下f(t)=t^2的轨迹长啥样,横坐标是t,纵坐标是f=y,这里也很奇怪f到低怎么定义,不然就只有y没有x了_, 轨迹s是关于时间t,因为Jerk是为了衡量轨迹舒适性的,不能直接加速度求导,要过渡到轨迹上 则Jerk=(d3f)/(dt3),若在[0,T]区间内Jerk的绝对值都比较小,则在[0,T]时间内规划的轨迹是比较舒适性的 _所以要积分!所以想确定一条轨迹f(s)需要使得Jerk小,由于绝对值不易处理,所以平方即:min ∫ 0 t ( d 3 f ( t ) d t 3 ) 2 d t \int_0^t(\frac{d^3f(t)}{dt^3})^2 dt ∫0t(dt3d3f(t))2dt ,这是一个关于 f(t)的泛函,积分的值取决于f(t)在[0,T]上的整体形状。想求使得 ∫ 0 t ( d 3 f ( t ) d t 3 ) 2 d t \int_0^t(\frac{d^3f(t)}{dt^3})^2 dt ∫0t(dt3d3f(t))2dt 取得极小值的f(t):显然当f(t)为二次或二次以下函数时, d 3 f ( t ) d t 3 = 0 \frac{d^3f(t)}{dt^3}=0 dt3d3f(t)=0 ,所以积分最小=0。所以:让Jerk在[0,T]上最小,f(t)应该取二次或以下的函数.
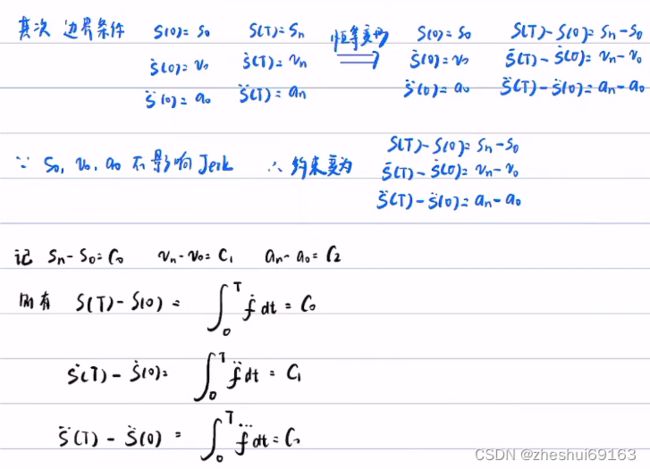
但真实情况要负责点,因为s=f(t)带有约束:(即:初始点和终点位置、速度、加速度一定,这就对s=f(t)的图像走势有一定的限制
s ( 0 ) = s 0 s(0)=s_0 s(0)=s0 s ( T ) = s n s(T)=s_n s(T)=sn
s ˙ ( 0 ) = v 0 \dot s(0)=v_0 s˙(0)=v0 s ˙ ( T ) = v n \dot s(T)=v_n s˙(T)=vn
s ¨ ( 0 ) = a 0 \ddot s(0)=a_0 s¨(0)=a0 s ¨ ( T ) = a n \ddot s(T)=a_n s¨(T)=an
以上共6个边界条件 而二次函数y=ax2+bx+c 只有三个变量无法满足6个边界条件,所以啊,舒适性指标Jerk是不能直接等于0的,在真实情况下,要求带边界约束的泛函,即:
find f(t) st ∫ 0 t ( d 3 f ( t ) d t 3 ) 2 d t \int_0^t(\frac{d^3f(t)}{dt^3})^2 dt ∫0t(dt3d3f(t))2dt 最小
subject to:
s ( 0 ) = s 0 s(0)=s_0 s(0)=s0 s ( T ) = s n s(T)=s_n s(T)=sn
s ˙ ( 0 ) = v 0 \dot s(0)=v_0 s˙(0)=v0 s ˙ ( T ) = v n \dot s(T)=v_n s˙(T)=vn
s ¨ ( 0 ) = a 0 \ddot s(0)=a_0 s¨(0)=a0 s ¨ ( T ) = a n \ddot s(T)=a_n s¨(T)=an
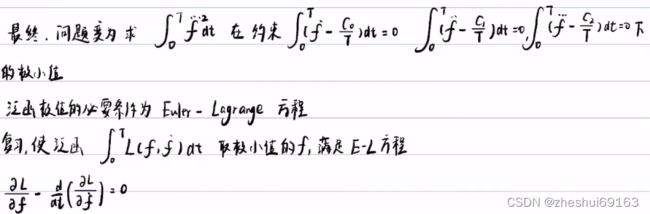
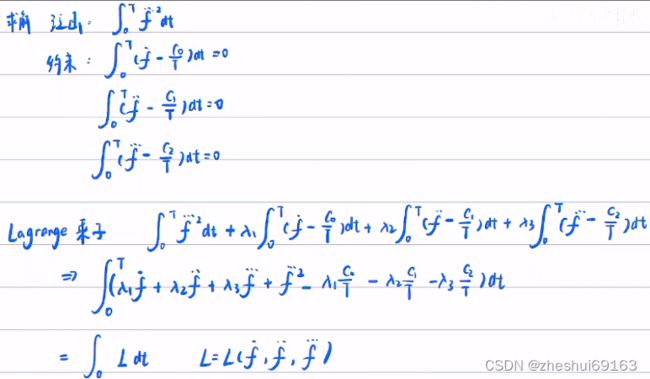
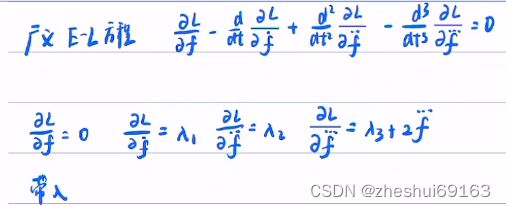
那么满足带约束的泛函 ∫ 0 t ( d 3 f ( t ) d t 3 ) 2 d t \int_0^t(\frac{d^3f(t)}{dt^3})^2 dt ∫0t(dt3d3f(t))2dt 的极值问题的解是:5次多项式(这个很好理解:5次多项式6个变量 刚好对应6个约束求解
解:显然f(t)只可能是在[0,T]上有界连续,因为无界、断函数会使Jerk无穷大,不妨设 s = f ( t ) = f ( 0 ) + f ˙ ( 0 ) t + f ¨ ( 0 ) 2 t 2 + . . . s=f(t)=f(0)+\dot f(0)t+\frac{\ddot f(0)}{2}t^2+... s=f(t)=f(0)+f˙(0)t+2f¨(0)t2+...
1)带入前3个边界条件可得:
f ( 0 ) = s 0 f(0)=s_0 f(0)=s0
f ˙ ( 0 ) = v 0 \dot f(0)=v_0 f˙(0)=v0
f ¨ ( 0 ) = a 0 \ddot f(0)=a_0 f¨(0)=a0
所以 f ( t ) = s 0 + v 0 t + 1 2 a 0 t 2 + f ¨ 6 t 3 + . . . f(t)=s_0+v_0t+\frac{1}{2}a_0t^2+\frac{\ddot f}{6}t^3+... f(t)=s0+v0t+21a0t2+6f¨t3+... (这都不需要推导 印象中就是这样啊)
观察:因为KaTeX parse error: Undefined control sequence: \dddot at position 6: Jerk=\̲d̲d̲d̲o̲t̲ ̲f(t) 所以 s 0 v 0 a 0 s_0\ v_0\ a_0 s0 v0 a0 的值不影响 Jerk 还是要求f(t)使得$ Jerk=\dddot f(t)$ 最小
现在前三个条件用完了,可以确定 f ( t ) = s 0 + v 0 t + 1 2 a 0 t 2 + f ¨ 6 t 3 + . . . f(t)=s_0+v_0t+\frac{1}{2}a_0t^2+\frac{\ddot f}{6}t^3+... f(t)=s0+v0t+21a0t2+6f¨t3+... 的样式,继续考虑另外三个约束条件
2)对后3个边界条件
只有转换为积分形式 才能用到s(T)这种t=T的值
所以:一般离散的点怎么连接:一般都是五次多项式(这个多项式是轨迹关于时间t的)
注意:推导的过程是用广义欧拉-拉格朗日写的,所以求出的是极小值,即Jerk+后三个边界调解=的最小值,不是直接=0,所以这里是保证了目标Jerk极小,也保证边界极小,后3个边界也没有直接满足.
而且这里退出的f(t)还应该再考虑下s0 v0 a0,则a5=s0,a4=v0,a3=a_0/2