AcWing 1077. 皇宫看守(树形DP + 状态机DP)
AcWing 1077. 皇宫看守(树形DP + 状态机DP)
- 一、问题
- 二、分析
-
- 1、思路分析
- 2、状态表示
- 3、状态转移
- 4、循环设计
- 5、初末状态
- 三、代码
一、问题
二、分析
1、思路分析
在讲解这道题之前,大家需要对状态机DP有一定的了解,如果不了解或者不太清楚的话,可以先去看作者之前的文章:第四十七章 动态规划——状态压缩模型
我们用下面的图进行分析:
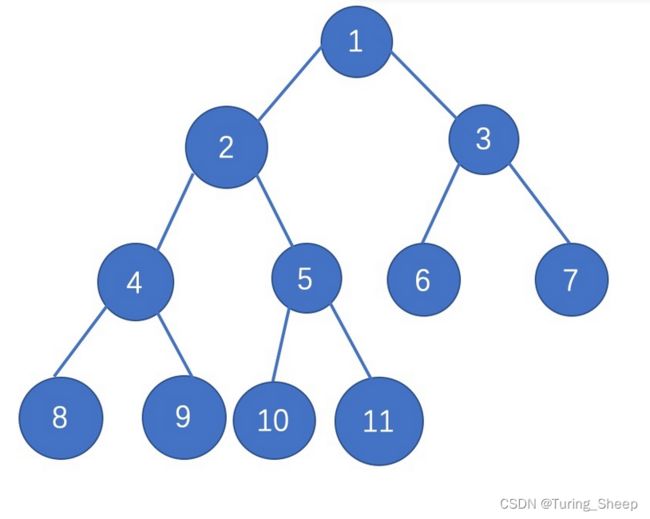
我们以2号点为例子,观察一下能够看到2号点的点:
2号点的父节点:1
2号点的子节点:4和5
2号点自己
如果我们不选2号点的话,分为下面两种情况:
第一种:
如果2号点能够被父节点看到的话,那么2号点的子节点4和5选不选都行。因为2号点已经有人能看到了。
第二种:
如果2好点能够被子节点看到的话,那么2号点的子节点至少选一个,由于题目中要求的是最小,所以我们只要在子节点中选一个就行。
如果我们选了2号点,即2号点能够被自己看到的话:
子节点随便选,挑一个最小值的就行。
我们发现2号点选和不选对于子树的选择也产生了一定的影响,因此我们需要采用状态机DP。
2、状态表示
f [ u ] [ j ] f[u][j] f[u][j]表示在以 u u u为根节点的树中,当 u u u的状态是 j j j的时候,我们选择的最少节点。
其中:
j = 0 j=0 j=0的时候,表示 u u u不选,但是 u u u能够被父亲观察到。
j = 1 j=1 j=1的时候,表示 u u u不选,但是 u u u能够被子节点看到。
j = 2 j=2 j=2的时候,表示选 u u u, u u u至少能被自己看到。
3、状态转移
我们一个情况一个情况的分析:
j = 0 j=0 j=0的时候
u u u没选,那么对于其子节点而言, f [ s o n ] [ 0 ] f[son][0] f[son][0]就是不存在的,因为这个状态是说没有选节点 s o n son son,但是 s o n son son能够被父节点观察到。我们根本就没选它的父节点 u u u,又怎么会被观察到呢?所以这种情况不存在。
那么由于 u u u已经被父节点观察到了,那么他的子节点 s o n son son选或者不选,能被谁看到,对于 u u u而言是不重要的,我们只需要选出一个最小值即可。
那么针对每个子树都选出一个最小值,最后加在一起就行了。
f [ u ] [ 0 ] = ∑ m i n ( f [ s o n ] [ 1 ] , f [ s o n ] [ 2 ] ) f[u][0]=\sum min(f[son][1],f[son][2]) f[u][0]=∑min(f[son][1],f[son][2])
j = 1 j=1 j=1的时候
u u u没选,并且 u u u能够被子节点观察到,由于 u u u没选,根据刚刚的理由,我们子节点状态中合法的只有两个了: f [ s o n ] [ 1 ] f[son][1] f[son][1]和 f [ s o n ] [ 2 ] f[son][2] f[son][2]
题目中要求至少,也就是我们需要拿出一个son是必须选状态 f [ s o n ] [ 2 ] f[son][2] f[son][2]的,其余的在两个状态之间选出一个最小值,最后加在一起。
但是我们具体拿出来哪个还是不确定的,所以我们需要枚举一下,然后在所有的情况中再选最小值。
f [ u ] [ 1 ] = m i n ( f [ s o n k ] [ 2 ] + ∑ i ≠ k m i n ( f [ s o n i ] [ 1 ] , f [ s o n i ] [ 2 ] ) ) f[u][1]= min\bigg(f[son_k][2]+\sum_{i \neq k} min(f[son_i][1],f[son_i][2])\bigg) f[u][1]=min(f[sonk][2]+i=k∑min(f[soni][1],f[soni][2]))
j = 2 j=2 j=2的时候
这个情况是最好处理的,这种情况说明我们选了 u u u,那么子节点的三种情况都可选,挑一个最小的就行。
f [ u ] [ 2 ] = m i n ( f [ s o n ] [ 0 ] , f [ s o n ] [ 1 ] , f [ s o n ] [ 2 ] ) f[u][2]=min(f[son][0],f[son][1],f[son][2]) f[u][2]=min(f[son][0],f[son][1],f[son][2])
4、循环设计
我们这个是1维的,所以写一个for循环就行,但是由于我们的这些节点存储在了树上,所以我们需要用DFS代替。
5、初末状态
f [ u ] [ 2 ] = v [ u ] f[u][2]=v[u] f[u][2]=v[u],因为这个状态说明我们选了节点 u u u。
三、代码
由于是从根节点开始,所以需要选出根节点,即我们标记所有的子节点,最后剩下的就是根节点 r o o t root root。
#include