Ubuntu20.04运行lidar_align标定激光雷达和IMU
目录
- 一、源码及数据集下载
- 二、安装依赖
- 三、处理数据集
- 四、修改源码
-
- 4.1 改写 loader.cpp
- 4.2 更改 NLOPTConfig.cmake文件位置
- 4.3 修改源码CMakeLists.txt文件
- 4.4 修改launch文件
- 五、运行代码
-
- 5.1 查看标定结果
- 5.2 查看.ply文件
-
- 5.2.1 用cloudcompare打开
- 5.2.2 用Ubuntu的pcl viewer打开
- 5.2.3 转换成pcd格式后再用cloudcompare打开
- 六、遇到的问题及解决方法
-
- 6.1 缺少头文件#include
-
- 报错内容
- 解决方法
- 6.2 找不到nlopt编译文件
-
- 报错内容:
- 解决方法
- 6.3 pcl库报错
-
- 报错内容
- 解决方法
- 6.4 系统运存不足
- 报错内容
- 解决方法
- 6.1 缺少头文件#include
- 七、待解决问题
Windows 10(64bits) + VMware 16 Pro + Ubuntu 20.04 + noetic
lidar_align基本原理:
1、读取rosbag的数据,通过时间戳匹配LiDAR每帧里面的每个点和IMU的坐标变换
2、通过上面的变换矩阵将利用位姿信息将LiDAR的每帧拼接成点云,迭代优化坐标变换使得距离最小。
一、源码及数据集下载
lidar_align源码:https://github.com/ethz-asl/lidar_align
nlopt 源码:github.com/stevengj/nlopt
Walking dataset:https://pan.baidu.com/s/1zbsYjkrhRaQ-feXRfuP9Yg
提取码:zsk7
Park dataset:https://pan.baidu.com/s/1umjQ27ekUcSDTvK15Rhaeg
提取码:bswp
二、安装依赖
主要是nlopt包,仅使用以下命令安装可能会报错。
sudo apt-get install libnlopt-dev
根据上面的链接下载nlopt源码进行安装。
git clone git://github.com/stevengj/nlopt
cd nlopt
mkdir build
cd build
cmake ..
make -j8
sudo make install
三、处理数据集
原始数据集话题内容较多,而且非常大,全部进行计算会导致系统内存不足而停止运算。
针对Park dataset数据集:
从park_dataset.bag中提取激光雷达点云和IMU数据,注意激光雷达点云格式需要是sensor_msgs/PointCloud2
rosbag filter park_dataset.bag cal.bag "topic == '/points_raw' or topic =='/imu_raw'"
处于初步调试学习使用这个工具包的阶段,暂时要求能出结果就行。使用rosbag命令提取一个时间段内的数据进行计算就行。
rosbag filter cal.bag caltime.bag "t.to_sec() >1593996300.00 and t.to_sec() <= 1593996350.00"
四、修改源码
4.1 改写 loader.cpp
这个工具包原本是用来标定激光雷达和里程计的,所以需要改写IMU接口以替换里程计接口。以下代码可以直接复制粘贴使用。
#include types;
// types.push_back(std::string("geometry_msgs/TransformStamped"));
// rosbag::View view(bag, rosbag::TypeQuery(types));
// size_t tform_num = 0;
// for (const rosbag::MessageInstance& m : view) {
// std::cout << " Loading transform: \e[1m" << tform_num++
// << "\e[0m from ros bag" << '\r' << std::flush;
// geometry_msgs::TransformStamped transform_msg =
// *(m.instantiate());
// Timestamp stamp = transform_msg.header.stamp.sec * 1000000ll +
// transform_msg.header.stamp.nsec / 1000ll;
// Transform T(Transform::Translation(transform_msg.transform.translation.x,
// transform_msg.transform.translation.y,
// transform_msg.transform.translation.z),
// Transform::Rotation(transform_msg.transform.rotation.w,
// transform_msg.transform.rotation.x,
// transform_msg.transform.rotation.y,
// transform_msg.transform.rotation.z));
// odom->addTransformData(stamp, T);
// }
if (odom->empty()) {
ROS_ERROR_STREAM("No odom messages found!");
return false;
}
return true;
}
bool Loader::loadTformFromMaplabCSV(const std::string& csv_path, Odom* odom) {
std::ifstream file(csv_path, std::ifstream::in);
size_t tform_num = 0;
while (file.peek() != EOF) {
std::cout << " Loading transform: \e[1m" << tform_num++
<< "\e[0m from csv file" << '\r' << std::flush;
Timestamp stamp;
Transform T;
if (getNextCSVTransform(file, &stamp, &T)) {
odom->addTransformData(stamp, T);
}
}
return true;
}
// lots of potential failure cases not checked
bool Loader::getNextCSVTransform(std::istream& str, Timestamp* stamp,
Transform* T) {
std::string line;
std::getline(str, line);
// ignore comment lines
if (line[0] == '#') {
return false;
}
std::stringstream line_stream(line);
std::string cell;
std::vector<std::string> data;
while (std::getline(line_stream, cell, ',')) {
data.push_back(cell);
}
if (data.size() < 9) {
return false;
}
constexpr size_t TIME = 0;
constexpr size_t X = 2;
constexpr size_t Y = 3;
constexpr size_t Z = 4;
constexpr size_t RW = 5;
constexpr size_t RX = 6;
constexpr size_t RY = 7;
constexpr size_t RZ = 8;
*stamp = std::stoll(data[TIME]) / 1000ll;
*T = Transform(Transform::Translation(std::stod(data[X]), std::stod(data[Y]),
std::stod(data[Z])),
Transform::Rotation(std::stod(data[RW]), std::stod(data[RX]),
std::stod(data[RY]), std::stod(data[RZ])));
return true;
}
} // namespace lidar_align
4.2 更改 NLOPTConfig.cmake文件位置
将 lidar_align 源码包里的 NLOPTConfig.cmake 复制到 ROS工作空间lidar_align_ws/src 路径下面。
4.3 修改源码CMakeLists.txt文件
使用管理员权限用gedit编辑器打开CMakeLists.txt文件,添加以下代码。
set (CMAKE_PREFIX_PATH "/usr/local/lib/cmake/nlopt")
set(CMAKE_CXX_STANDARD 14)
4.4 修改launch文件
修改launch文件中的包路径就可以。
<arg name="bag_file" default="/mnt/hgfs/H/caltime.bag"/>
五、运行代码
启动代码进行标定。
catkin_make
source devel/setup.bash
roslaunch lidar_align lidar_align.launch
需要进行一段时间的等待。

计算完成后,在程序包的results文件夹里会出现一个.txt文件和一个.ply文件。
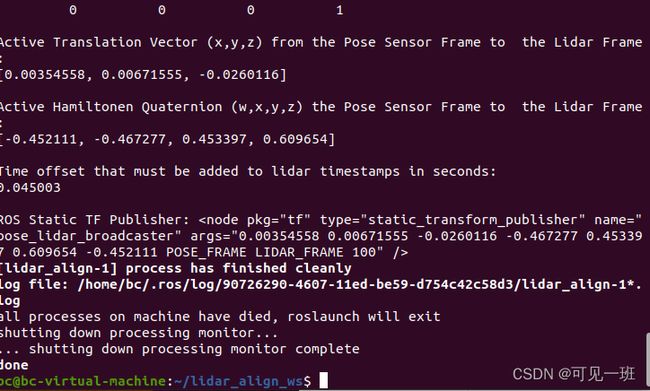
5.1 查看标定结果
打开.txt文件查看标定结果,主要是变化矩阵,变化向量和四元数。
Active Transformation Vector (x,y,z,rx,ry,rz) from the Pose Sensor Frame to the Lidar Frame:
[0.00354558, 0.00671555, -0.0260116, 1.15427, -1.11999, -1.50597]
Active Transformation Matrix from the Pose Sensor Frame to the Lidar Frame:
-0.154495 0.127539 -0.979727 0.00354558
-0.974987 -0.180053 0.130309 0.00671555
-0.159784 0.975354 0.152166 -0.0260116
0 0 0 1
Active Translation Vector (x,y,z) from the Pose Sensor Frame to the Lidar Frame:
[0.00354558, 0.00671555, -0.0260116]
Active Hamiltonen Quaternion (w,x,y,z) the Pose Sensor Frame to the Lidar Frame:
[-0.452111, -0.467277, 0.453397, 0.609654]
Time offset that must be added to lidar timestamps in seconds:
0.045003
ROS Static TF Publisher: <node pkg="tf" type="static_transform_publisher" name="pose_lidar_broadcaster" args="0.00354558 0.00671555 -0.0260116 -0.467277 0.453397 0.609654 -0.452111 POSE_FRAME LIDAR_FRAME 100" />
5.2 查看.ply文件
5.2.1 用cloudcompare打开
会报错,不太懂,都点ok就行。

5.2.2 用Ubuntu的pcl viewer打开
第一次用需要安装pcl工具,输入以下指令报错时,按照提示安装即可。
pcl_ply2pcd caltime.ply 1.pcd
pcl_viewer 1.pcd
5.2.3 转换成pcd格式后再用cloudcompare打开
转换成pcd格式后再用cloudcompare打开时,没有报错。感觉cloudcompare查看更加方便。
六、遇到的问题及解决方法
6.1 缺少头文件#include
报错内容
error: ‘Imu’ is not a member of ‘sensor_msgs’
sensor_msgs::Imu imu=*(m.instantiate<sensor_msgs::Imu>());
^~~
/home/ubuntu/Sensors_Calibration/lidar_align_ws/src/lidar_align/src/loader.cpp:134:23: error: ‘imu’ was not declared in this scope
Timestamp stamp = imu.header.stamp.sec * 1000000ll +imu.header.stamp.nsec / 1000ll;
^~~
/home/ubuntu/Sensors_Calibration/lidar_align_ws/src/lidar_align/src/loader.cpp:134:23: note: suggested alternative: ‘time’
Timestamp stamp = imu.header.stamp.sec * 1000000ll +imu.header.stamp.nsec / 1000ll;
^~~
time
lidar_align/CMakeFiles/lidar_align.dir/build.make:110: recipe for target 'lidar_align/CMakeFiles/lidar_align.dir/src/loader.cpp.o' failed
make[2]: *** [lidar_align/CMakeFiles/lidar_align.dir/src/loader.cpp.o] Error 1
CMakeFiles/Makefile2:510: recipe for target 'lidar_align/CMakeFiles/lidar_align.dir/all' failed
make[1]: *** [lidar_align/CMakeFiles/lidar_align.dir/all] Error 2
Makefile:140: recipe for target 'all' failed
make: *** [all] Error 2
Invoking "make -j8 -l8" failed
解决方法
见4.1,改写loader文件,添加头文件,
6.2 找不到nlopt编译文件
报错内容:
Could not find a package configuration file provided by "NLOPT"with any of the following names:
NLOPTConfig.cmake
nlopt-config.cmake
解决方法
见4.2,更改 NLOPTConfig.cmake文件位置。
6.3 pcl库报错
报错内容
包含以下内容的一大堆错误。这个报错很常见。
/usr/include/pcl-1.10/pcl/point_types.h:574:1: error: ‘plus’ is not a member of ‘pcl::traits’
574 | POINT_CLOUD_REGISTER_POINT_STRUCT (pcl::CPPFSignature,
/usr/include/pcl-1.10/pcl/point_types.h:588:1: error: ‘plusscalar’ is not a member of ‘pcl::traits’
588 | POINT_CLOUD_REGISTER_POINT_STRUCT (pcl::PPFRGBSignature,
/usr/include/pcl-1.10/pcl/point_types.h:588:1: error: ‘type’ is not a member of ‘pcl::traits::datatype<pcl::PPFRGBSignature, pcl::fields::f4>::decomposed’ {aka ‘pcl::traits::decomposeArray<float>’}
/usr/include/pcl-1.10/pcl/point_types.h:588:1: error: ‘plusscalar’ is not a member of ‘pcl::traits’
588 | POINT_CLOUD_REGISTER_POINT_STRUCT (pcl::PPFRGBSignature,
解决方法
见4.3,修改源码CMakeLists.txt文件,添加set(CMAKE_CXX_STANDARD 14)。
6.4 系统运存不足
报错内容
执行到“Performing Global Optimization”步骤终止。
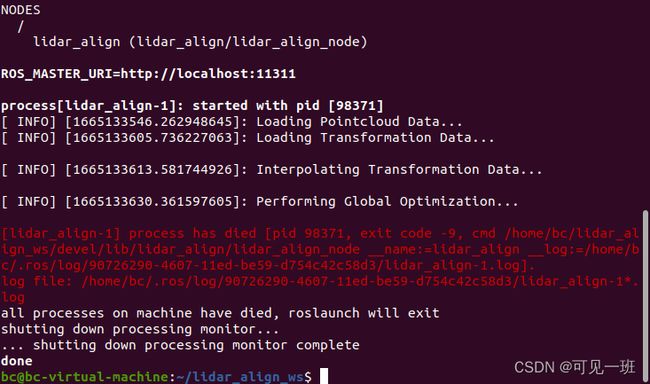
解决方法
方法1:见三,处理数据集。
方法2:将sensors.h中keep_points_ratio的默认值0.01改成0.005,如果还报错继续往小改。
七、待解决问题
1、标定结果的使用
2、标定结果的精度
3、标定结果的ply文件不明白,感觉不对
4、LIO-SAM跑自己的数据集
5、清除Ubuntu占用内存