OpenCV Sobel算子解析笔记
文章目录
-
- 1. Sobel算子数学原理
-
- 1.1 Sobel算子定义
- 1.2 Sobel算子公式推导
- 1.3 高阶Sobel算子
- 2. Sobel算子代码解析
1. Sobel算子数学原理
1.1 Sobel算子定义
Sobel \text{Sobel} Sobel算子:是计算机视觉领域的一种重要处理方法,主要用于获取数字图像的一阶梯度。该算子包含两组 3 × 3 3\times 3 3×3矩阵,将分别将其与图像作平面卷积,可得到图像 x x x方向及 y y y方向一阶梯度:
G x = [ − 1 0 1 − 2 0 2 − 1 0 1 ] ∗ I , G y = [ − 1 − 2 − 1 0 0 0 1 2 1 ] ∗ I \mathbf{G}_x=\begin{bmatrix}-1&0&1\\-2&0&2\\-1&0&1\end{bmatrix}*\mathbf{I},\mathbf{G}_y=\begin{bmatrix}-1&-2&-1\\0&0&0\\1&2&1\end{bmatrix}*\mathbf{I} Gx= −1−2−1000121 ∗I,Gy= −101−202−101 ∗I
1.2 Sobel算子公式推导
我们考察图像中某 1 1 1个像素点 Z 5 \text{Z}_5 Z5及其领域的 8 8 8个像素点,如下图所示:
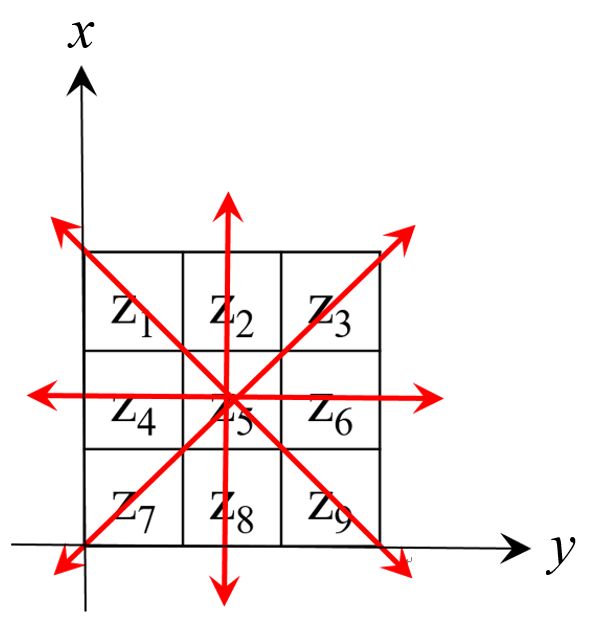
对于给定领域方向梯度矢量 g \mathbf{g} g的幅度为:
∣ g ∣ = 像素灰度差分 像素距离 |\mathbf{g}|=\frac{像素灰度差分}{像素距离} ∣g∣=像素距离像素灰度差分
Sobel \text{Sobel} Sobel算子所定义的像素距离为城市距离,如下图所示:

城市距离:在数字栅格中,如果只允许横向和纵向移动,城市距离表示从起点移动到终点所需的最少的步数。
关于像素点 Z 5 \text{Z}_5 Z5的方向梯度矢量,可对其 8 8 8领域的水平、垂直和 2 2 2个对角共计 4 4 4个方向对的梯度加权求和:
G = ( Z 3 − Z 7 ) 4 ∗ [ 1 1 ] + ( Z 1 − Z 9 ) 4 ∗ [ − 1 1 ] + ( Z 2 − Z 8 ) 2 ∗ [ 0 1 ] + ( Z 3 − Z 7 ) 2 ∗ [ 1 0 ] \mathbf{G}=\frac{(\text{Z}_3-\text{Z}_7)}{4}*\begin{bmatrix}1&1\end{bmatrix}+\frac{(\text{Z}_1-\text{Z}_9)}{4}*\begin{bmatrix}-1&1\end{bmatrix}+\frac{(\text{Z}_2-\text{Z}_8)}{2}*\begin{bmatrix}0&1\end{bmatrix}+\frac{(\text{Z}_3-\text{Z}_7)}{2}*\begin{bmatrix}1&0\end{bmatrix} G=4(Z3−Z7)∗[11]+4(Z1−Z9)∗[−11]+2(Z2−Z8)∗[01]+2(Z3−Z7)∗[10]
其中 4 4 4个向量控制差分方向,系数 1 4 \frac{1}{4} 41, 1 2 \frac{1}{2} 21为像素城市距离反比,整理上式可得:
G = [ − Z 1 + Z 3 − 2 Z 4 + 2 Z 6 − Z 7 + Z 9 4 Z 1 + 2 Z 2 + Z 3 − Z 7 − 2 Z 8 − Z 9 4 ] \mathbf{G}=\begin{bmatrix}\frac{-\text{Z}_1+\text{Z}_3-2\text{Z}_4+2\text{Z}_6-\text{Z}_7+\text{Z}_9}{4}&\frac{\text{Z}_1+2\text{Z}_2+\text{Z}_3-\text{Z}_7-2\text{Z}_8-\text{Z}_9}{4}\end{bmatrix} G=[4−Z1+Z3−2Z4+2Z6−Z7+Z94Z1+2Z2+Z3−Z7−2Z8−Z9]
上述公式推导来自文献https://blog.sciencenet.cn/blog-425437-1139187.html,但 4 4 4个控制差分方向的向量并非全部为单位向量,此处存在一些推理问题。如果将像素距离定义为欧式距离,并将 4 4 4个控制差分方向的向量归一化,那么整理后的方向梯度矢量也与上述公式完全一致。
注意,上式需除以 4 4 4才是平均方向梯度矢量。在实际操作过程中,上式会扩大 4 4 4倍以将计算中的浮点数乘法运算转化为整数乘法运算。因此,计算出的估计值比平均梯度在数值上扩大了 16 16 16倍。调整后的方向梯度矢量的 x x x以及 y y y分量分别为:
G x ′ = − Z 1 + Z 3 − 2 Z 4 + 2 Z 6 − Z 7 + Z 9 G y ′ = Z 1 + 2 Z 2 + Z 3 − Z 7 − 2 Z 8 − Z 9 \begin{aligned} \text{G}'_x&=-\text{Z}_1+\text{Z}_3-2\text{Z}_4+2\text{Z}_6-\text{Z}_7+\text{Z}_9\\ \text{G}'_y&=\text{Z}_1+2\text{Z}_2+\text{Z}_3-\text{Z}_7-2\text{Z}_8-\text{Z}_9 \end{aligned} Gx′Gy′=−Z1+Z3−2Z4+2Z6−Z7+Z9=Z1+2Z2+Z3−Z7−2Z8−Z9
上式与 1.1 1.1 1.1节中的 Sobel \text{Sobel} Sobel算子定义完全一致。
1.3 高阶Sobel算子
根据算子的对称性以及卷积的运算性质,基础 Sobel \text{Sobel} Sobel算子可分解为两次卷积操作:
[ − 1 0 1 − 2 0 2 − 1 0 1 ] = [ 1 2 1 ] ∗ [ − 1 0 1 ] , [ − 1 − 2 − 1 0 0 0 1 2 1 ] = [ 1 2 1 ] ∗ [ − 1 0 1 ] \begin{aligned} \begin{bmatrix}-1&0&1\\-2&0&2\\-1&0&1\end{bmatrix}=\begin{bmatrix}1\\2\\1\end{bmatrix}*\begin{bmatrix}-1&0&1\end{bmatrix}, \begin{bmatrix}-1&-2&-1\\0&0&0\\1&2&1\end{bmatrix}=\begin{bmatrix}1&2&1\end{bmatrix}*\begin{bmatrix}-1\\0\\1\end{bmatrix} \end{aligned} −1−2−1000121 = 121 ∗[−101], −101−202−101 =[121]∗ −101
观察上式中的两种一维算子可知: [ 1 2 1 ] \begin{bmatrix}1&2&1\end{bmatrix} [121]算子或其转置负责像素平滑,而 [ − 1 0 1 ] \begin{bmatrix}-1&0&1\end{bmatrix} [−101]算子或其转置负责差分计算。
根据上述分析,对于高阶算子而言,我们分别计算其平滑算子以及差分算子即可。
关于平滑算子,我们采用高斯平滑算子,该算子被认为是一种最优平滑算子。此处我们使用二项式展开式的系数来对高斯算子进行整数近似。对于 n n n阶 Sobel \text{Sobel} Sobel算子,我们取二项式 n − 1 n-1 n−1的展开式系数来计算平滑系数。另外,也可以采用 Pascal \text{Pascal} Pascal三角来计算平滑系数,平滑算子的 Pascal \text{Pascal} Pascal三角形式如下:
阶数 2 1 1 3 1 2 1 4 1 3 3 1 5 1 4 6 4 1 \begin{matrix} 阶数\\ 2&&&&1&&1\\ 3&&&1&&2&&1\\ 4&&1&&3&&3&&1\\ 5&1&&4&&6&&4&&1\\ \end{matrix} 阶数234511141326131411
三角中各个位置系数计算公式如下:
smooth ( n , k ) = ( n − 1 ) ! ( n − 1 − k ) ! k ! \text{smooth}(n,k)=\frac{(n-1)!}{(n-1-k)!k!} smooth(n,k)=(n−1−k)!k!(n−1)!
其中, n n n表示 Sobel \text{Sobel} Sobel算子阶数, k k k表示系数索引。
关于差分算子,我们取二项式 n − 2 n-2 n−2的展开式系数两侧补零后的后向差分结果来计算差分系数。也可以采用 Pascal \text{Pascal} Pascal三角来计算差分系数,差分算子的 Pascal \text{Pascal} Pascal三角形式如下:
阶数 2 1 − 1 3 1 0 − 1 4 1 1 − 1 1 5 1 2 0 − 2 − 1 \begin{matrix} 阶数\\ 2&&&&1&&-1\\ 3&&&1&&0&&-1\\ 4&&1&&1&&-1&&1\\ 5&1&&2&&0&&-2&&-1\\ \end{matrix} 阶数234511121100−1−1−1−21−1
三角中各个位置系数计算公式如下:
Pascal ( n , k ) = { n ! ( n − k ) ! k ! , 0 ≤ k ≤ n 0 diff ( n , k ) = Pascal ( n − 2 , k ) − Pascal ( n − 2 , k − 1 ) \begin{aligned} &\text{Pascal}(n,k)=\left\{\begin{matrix}\frac{n!}{(n-k)!k!}&,0\le k\le n\\0\end{matrix}\right.\\ &\text{diff}(n,k)=\text{Pascal}(n - 2,k) - \text{Pascal}(n - 2,k - 1) \end{aligned} Pascal(n,k)={(n−k)!k!n!0,0≤k≤ndiff(n,k)=Pascal(n−2,k)−Pascal(n−2,k−1)
其中, n n n表示 Sobel \text{Sobel} Sobel算子阶数, k k k表示系数索引。
2. Sobel算子代码解析
在 OpenCV \text{OpenCV} OpenCV中,关于 Sobel \text{Sobel} Sobel算子的核心代码位于 deriv.cpp \text{deriv.cpp} deriv.cpp文件中:
void cv::Sobel( InputArray _src, OutputArray _dst, int ddepth, int dx, int dy,
int ksize, double scale, double delta, int borderType )
// _src:输入图像
// _dst:输出图像
// ddepth:输出图像矩阵类型
// dx:x方向阶数
// dy:y方向阶数
// ksize:算子阶数
// scale:算子缩放因子
// delta:在存储滤波结果之前添加到滤波结果中的偏移量
// borderType:边缘处理类型
{
CV_INSTRUMENT_REGION();
CV_Assert(!_src.empty()); // 参数检查
int stype = _src.type(), sdepth = CV_MAT_DEPTH(stype), cn = CV_MAT_CN(stype);
// stype:矩阵类型,sdepth:数据类型以及数据位数,cn:通道数
if (ddepth < 0) // 如果输出图像未定义数据类型以及数据位数,则使用输入图像值
ddepth = sdepth;
int dtype = CV_MAKE_TYPE(ddepth, cn); // 设置输出图像矩阵类型
_dst.create( _src.size(), dtype ); // 创建与输入图像同尺寸输出图像
int ktype = std::max(CV_32F, std::max(ddepth, sdepth));
Mat kx, ky;
getDerivKernels( kx, ky, dx, dy, ksize, false, ktype ); // 获取 Sobel 算子系数
if( scale != 1 ) // 如果算子缩放因子不为 1 则对系数进行缩放
{
// usually the smoothing part is the slowest to compute,
// so try to scale it instead of the faster differentiating part
if( dx == 0 )
kx *= scale;
else
ky *= scale;
}
CV_OCL_RUN(ocl::isOpenCLActivated() && _dst.isUMat() && _src.dims() <= 2 && ksize == 3 &&
(size_t)_src.rows() > ky.total() && (size_t)_src.cols() > kx.total(),
ocl_sepFilter3x3_8UC1(_src, _dst, ddepth, kx, ky, delta, borderType));
// OpenCL 加速
CV_OCL_RUN(ocl::isOpenCLActivated() && _dst.isUMat() && _src.dims() <= 2 && (size_t)_src.rows() > kx.total() && (size_t)_src.cols() > kx.total(),
ocl_sepFilter2D(_src, _dst, ddepth, kx, ky, Point(-1, -1), delta, borderType))
// OpenCL 加速
Mat src = _src.getMat();
Mat dst = _dst.getMat();
Point ofs;
Size wsz(src.cols, src.rows);
if(!(borderType & BORDER_ISOLATED))
src.locateROI( wsz, ofs );
CALL_HAL(sobel, cv_hal_sobel, src.ptr(), src.step, dst.ptr(), dst.step, src.cols, src.rows, sdepth, ddepth, cn,
ofs.x, ofs.y, wsz.width - src.cols - ofs.x, wsz.height - src.rows - ofs.y, dx, dy, ksize, scale, delta, borderType&~BORDER_ISOLATED);
// CV_HAL_ERROR_NOT_IMPLEMENTED
CV_OVX_RUN(true,
openvx_sobel(src, dst, dx, dy, ksize, scale, delta, borderType))
// OpenVX 加速
//CV_IPP_RUN_FAST(ipp_Deriv(src, dst, dx, dy, ksize, scale, delta, borderType));
sepFilter2D(src, dst, ddepth, kx, ky, Point(-1, -1), delta, borderType );
// 对 src 图像进行可分离线性滤波
// src:输入图像
// dst:输出图像
// ddepth:输出图像矩阵类型
// kx:x 方向滤波系数
// ky:y 方向滤波系数
// Point(-1, -1):内核中的锚点位置,默认值 (-1,-1) 表示锚点位于内核中心
// delta:在存储滤波结果之前添加到滤波结果中的偏移量
// borderType:边缘处理类型
}
void cv::getDerivKernels( OutputArray kx, OutputArray ky, int dx, int dy,
int ksize, bool normalize, int ktype )
{
if( ksize <= 0 )
getScharrKernels( kx, ky, dx, dy, normalize, ktype );
else
getSobelKernels( kx, ky, dx, dy, ksize, normalize, ktype );
}
static void getSobelKernels( OutputArray _kx, OutputArray _ky,
int dx, int dy, int _ksize, bool normalize, int ktype )
// _kx:x 方向算子系数
// _ky:y 方向算子系数
// dx:x 方向算子阶数
// dy:y 方向算子阶数
// _ksize:算子阶数
// normalize:算子系数是否归一化
// ktype:算子数据类型
{
int i, j, ksizeX = _ksize, ksizeY = _ksize;
if( ksizeX == 1 && dx > 0 ) // 如果 x 方向需要计算差分且 x 方向算子阶数为1,则调整算子阶数为3
ksizeX = 3;
if( ksizeY == 1 && dy > 0 ) // 如果 y 方向需要计算差分且 y 方向算子阶数为1,则调整算子阶数为3
ksizeY = 3;
CV_Assert( ktype == CV_32F || ktype == CV_64F ); // 参数检查
_kx.create(ksizeX, 1, ktype, -1, true); // 创建 x 方向算子系数
_ky.create(ksizeY, 1, ktype, -1, true); // 创建 y 方向算子系数
Mat kx = _kx.getMat();
Mat ky = _ky.getMat();
if( _ksize % 2 == 0 || _ksize > 31 ) // 如果算子阶数为偶数或大于31则报错
CV_Error( CV_StsOutOfRange, "The kernel size must be odd and not larger than 31" );
std::vector kerI(std::max(ksizeX, ksizeY) + 1); // 临时算子系数,用于递推 Pascal 三角
CV_Assert( dx >= 0 && dy >= 0 && dx+dy > 0 ); // 参数检查
for( int k = 0; k < 2; k++ )
{
Mat* kernel = k == 0 ? &kx : &ky; // 算子系数
int order = k == 0 ? dx : dy; // 差分阶数
int ksize = k == 0 ? ksizeX : ksizeY; // 算子阶数
CV_Assert( ksize > order ); // 参数检查
if( ksize == 1 ) // 算子阶数为1,则算子系数为(1)
kerI[0] = 1;
else if( ksize == 3 ) // 算子阶数为3
{
if( order == 0 ) // 如果差分阶数为0,则算子系数为(1,2,1),用于平滑结果
kerI[0] = 1, kerI[1] = 2, kerI[2] = 1;
else if( order == 1 ) // 如果差分阶数为1,则算子系数为(-1,0,1),用于计算一阶差分
kerI[0] = -1, kerI[1] = 0, kerI[2] = 1;
else // 如果差分阶数大于1,则算子核为(1,-2,1),用于计算二阶差分
kerI[0] = 1, kerI[1] = -2, kerI[2] = 1;
}
else
{
int oldval, newval;
kerI[0] = 1;
for( i = 0; i < ksize; i++ )
kerI[i+1] = 0;
for( i = 0; i < ksize - order - 1; i++ ) // 递推平滑算子 Pascal 三角
{
oldval = kerI[0];
for( j = 1; j <= ksize; j++ )
{
newval = kerI[j]+kerI[j-1];
kerI[j-1] = oldval;
oldval = newval;
}
}
for( i = 0; i < order; i++ ) // 递推差分算子 Pascal 三角
{
oldval = -kerI[0];
for( j = 1; j <= ksize; j++ )
{
newval = kerI[j-1] - kerI[j];
kerI[j-1] = oldval;
oldval = newval;
}
}
}
Mat temp(kernel->rows, kernel->cols, CV_32S, &kerI[0]);
double scale = !normalize ? 1. : 1./(1 << (ksize-order-1));
temp.convertTo(*kernel, ktype, scale);
}
}
}