opencv获取模板旋转角度_经验 | OpenCV图像旋转的原理与技巧

点击上方蓝字关注我们
微信公众号:OpenCV学堂
关注获取更多计算机视觉与深度学习知识
01
引言
初学图像处理,很多人遇到的第一关就是图像旋转,图像旋转是图像几何变换中最具代表性的操作,包含了插值、背景处理、三角函数等相关知识,一个变换矩阵跟计算图像旋转之后的大小公式就让很多开发者最后直接调用函数了事,但是其实这个东西并没有这么难懂,可以说主要是之前别人写的公式太吓人,小编很久以前第一次接触的也是被吓晕了!所以决定从程序员可以接受的角度从新介绍一下图像旋转基本原理与OpenCV中图像旋转函数操作的基本技巧。
图像旋转基本原理
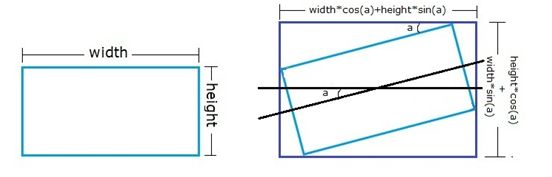
旋转涉及到两个问题,一个是图像旋转之后的大小会发生改变,会产生背景,通过背景填充方式都是填充黑色,此外旋转还是产生像素的位置迁移,新的位置像素需要通过插值计算获得,常见的插值方式有最近邻、线性插值、立方插值等。
首先看旋转之后的图像宽高变化,如下图所示:

这个是正常的平面坐标系中的旋转矩阵,可以简写为:

是一个2x3的矩阵,但是在图像中左上角是原点,要实现围绕图像的中心位置旋转,M就要重新计算,所以OpenCV中的图像旋转矩阵为:

其中scale是表示矩阵支持旋转+放缩,这里可以把Scale=1。第三列是图像旋转之后中心位置平移量。
函数支持
OpenCV中支持图像旋转的函数有两个,一个是直接支持旋转的函数,但是它支持的是90,180,270这样的特殊角度旋转。
void cv::rotate ( InputArray src, OutputArray dst, int rotateCode)其中rotateCode参数必须为:
ROTATE_180,ROTATE_90_CLOCKWISEROTATE_90_COUNTERCLOCKWISE 函数warpAffine支持任意角度的旋转,通过定义M矩阵实现
void cv::warpAffine( InputArray src, // 输入图像 OutputArray dst, // 输出图像 InputArray M, // 旋转矩阵 Size dsize, // 输出图像大小 int flags = INTER_LINEAR, // 像素插值方式 int borderMode = BORDER_CONSTANT, // 背景填充默认为常量 const Scalar & borderValue = Scalar() // 填充颜色默认为黑色)但是M如何生成与获取,OpenCV中提供了一个函数根据输入的参数自动生成旋转矩阵M,该函数为:
Mat cv::getRotationMatrix2D( Point2f center, double angle, double scale)代码演示
原图

使用自定义的M矩阵实现图像旋转
h, w, c = src.shape
# 定义矩阵
M = np.zeros((2, 3), dtype=np.float32)
# 定义角度
alpha = np.cos(np.pi / 4.0)
beta = np.sin(np.pi / 4.0)
print("alpha : ", alpha)
# 初始化矩阵
M[0, 0] = alpha
M[1, 1] = alpha
M[0, 1] = beta
M[1, 0] = -beta
cx = w / 2
cy = h / 2
tx = (1-alpha)*cx - beta*cy
ty = beta*cx + (1-alpha)*cy
M[0,2] = tx
M[1,2] = ty
# 执行旋转
dst = cv.warpAffine(src, M, (w, h))
cv.imshow("rotate-center-demo", dst)
重新计算旋转之后的图像大小,实现无Crop版本的图像旋转
h, w, c = src.shape
M = np.zeros((2, 3), dtype=np.float32)
alpha = np.cos(np.pi / 4.0)
beta = np.sin(np.pi / 4.0)
print("alpha : ", alpha)
# 初始旋转矩阵
M[0, 0] = alpha
M[1, 1] = alpha
M[0, 1] = beta
M[1, 0] = -beta
cx = w / 2
cy = h / 2
tx = (1-alpha)*cx - beta*cy
ty = beta*cx + (1-alpha)*cy
M[0,2] = tx
M[1,2] = ty
# change with full size
bound_w = int(h * np.abs(beta) + w * np.abs(alpha))
bound_h = int(h * np.abs(alpha) + w * np.abs(beta))
# 添加中心位置迁移
M[0, 2] += bound_w / 2 - cx
M[1, 2] += bound_h / 2 - cy
dst = cv.warpAffine(src, M, (bound_w, bound_h))
cv.imshow("rotate without cropping", dst)
背景随便变化+无Crop版本的图像旋转动态演示
degree = 1.0
d1 = np.pi / 180.0
while True:
alpha = np.cos(d1*degree)
beta = np.sin(d1*degree)
M[0, 0] = alpha
M[1, 1] = alpha
M[0, 1] = beta
M[1, 0] = -beta
cx = w / 2
cy = h / 2
tx = (1 - alpha) * cx - beta * cy
ty = beta * cx + (1 - alpha) * cy
M[0, 2] = tx
M[1, 2] = ty
# change with full size
bound_w = int(h * np.abs(beta) + w * np.abs(alpha))
bound_h = int(h * np.abs(alpha) + w * np.abs(beta))
M[0, 2] += bound_w / 2 - cx
M[1, 2] += bound_h / 2 - cy
red = np.random.randint(0, 255)
green = np.random.randint(0, 255)
blue = np.random.randint(0, 255)
dst = cv.warpAffine(src, M, (bound_w, bound_h), borderMode=cv.BORDER_CONSTANT, borderValue=(blue, green, red))
cv.imshow("rotate+background", dst)
c = cv.waitKey(1000)
if c == 27:
break
degree += 1
print("degree", degree)
if degree > 360:
degree = degree % 360

君子藏器于身,待时而动
推荐阅读
OpenCV4系统化学习路线图-视频版本!
Tensorflow + OpenCV4 安全帽检测模型训练与推理
汇总 | OpenCV DNN模块中支持的分类网络
OpenCV中支持的人脸检测方法整理与汇总
从3D人脸到自动驾驶,CVPR2020十个顶级开源数据集
轻松学Pytorch – 构建UNet实现道路裂纹检测
详解ENet | CPU可以实时的道路分割网络
从Pytorch 的ONNX到OpenVINO中IR中间层
OpenVINO中的FCOS人脸检测模型代码演示
详解OpenVINO 模型库中的人脸检测模型
效果特好 | OpenVINO手写数字识别
OpenVINO+OpenCV 文本检测与识别
OpenVINO + OpenCV实现点头与摇头识别验证
OpenVINO + OpenCV实现车辆检测与道路分割
OpenCV二值图像分析之寻找缺失与靶心
OpenCV 基于Inception模型图像分类
OpenCV4.4 + YOLOv4 真的可以运行了…..
告别对象检测图像数据手动标注的坑,用Anno-Mage半自动图像标注工具
