java 添加盲水印_OpenCV-图像处理-频域手段添加盲水印
[傅里叶变换算法及盲水印实现]
盲水印,顾名思义就是看不见的水印。今天我们来说下频域加盲水印。相信大家做过图像处理的对频域、时域、空间域概念都有了一定的了解。
空间域,我们日常所见的图像就是空域。空域添加数字水印的方法是在空间域直接对图像操作(之所以说的这么绕,是因为不仅仅原图是空域,原图的差分等等也是空域),比如将水印直接叠加在图像上。
频域:描述信号在频率方面特性时用到的一种坐标系。在图像中就是图像灰度变化强烈的情况,图像的频率。
时域:是描述数学函数或物理信号对时间的关系。例如一个信号的时域波形可以表达信号随着时间的变化。
下边来说说频域添加盲水印原理:频域添加数字水印的方法,是指通过某种变换手段(傅里叶变换,离散余弦变换,小波变换等)将图像变换到频域(小波域),在频域对图像添加水印,再通过逆变换,将图像转换为空间域。相对于空域手段,频域手段隐匿性更强,抗攻击性更高。
如果对频域、傅里叶转换不太懂得,可以参考这篇文章如果看了此文你还不懂傅里叶变换,那就过来掐死我吧【完整版】,感谢大神。
傅里叶变换公式png
我们有方法将时域信号转换成为频域,同样,我们也能将二维信号(图像)转换为频域。
因为图像是离散信号,我们实际用的是 离散傅里叶变换,在本文采用的都是二维快速傅里叶变换,快速傅里叶变换与离散傅里叶变换等价。
添加盲水印流程:
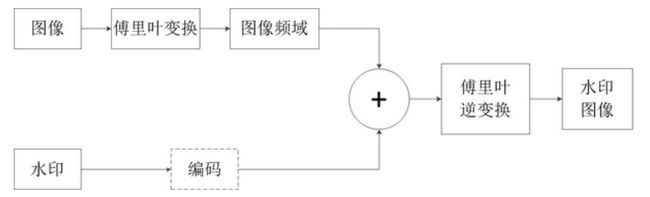
傅里叶转换添加水印.png
水印提取是水印叠加的逆过程:
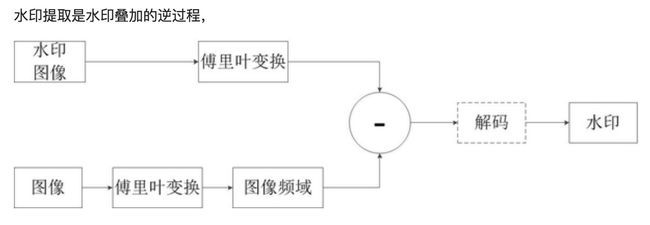
水印提取.png
上边说了下一些基础及频域加盲水印原理。下边来说下具体代码,具体代码用iOS来实现,我们使用OpenCV3来实现,OpenCV3对图像处理使用 Mat(包含信息有矩阵的大小,用于存储的方法,矩阵存储的地址等)的矩阵头和一个指针指向包含了像素值的矩阵。而OpenCV2是IplImage,如果你在查找资料的时候发现IplImage则是之前的C实现的。因为我们使用OpenCV3是C++实现的只要看懂学会,Android、python等都可以按照其代码来实现的。
首先我们先来建个工程来添加OpenCV库,我们这里是pod下来的库----pod 'OpenCV', '~> 3.2.0',方便管理。
全局先定义:
cv::Mat _complexImage;
vectorplanes;
vectorallPlanes;
1.原始图片UIImage转Mat进行处理
- (cv::Mat)cvMatFromUIImage:(UIImage *)image
{
UIImage *tmpImage = image;
CGColorSpaceRef colorSpace = CGImageGetColorSpace(tmpImage.CGImage);
CGFloat cols = tmpImage.size.width;
CGFloat rows = tmpImage.size.height;
cv::Mat cvMat(rows, cols, CV_8UC4);
CGContextRef contextRef = CGBitmapContextCreate(cvMat.data,cols,rows,8,cvMat.step[0],colorSpace,kCGImageAlphaNoneSkipLast | kCGBitmapByteOrderDefault);
CGContextDrawImage(contextRef, CGRectMake(0, 0, cols, rows), tmpImage.CGImage);
CGContextRelease(contextRef);
return cvMat;
}
2.为了加快傅里叶转换速度,先对图片进行尺寸优化
- (cv::Mat)optimizeImageDim:(cv::Mat)image {
Mat padded = Mat();
// get the optimal rows size for dft
int addPixelRows = getOptimalDFTSize(image.rows);
// get the optimal cols size for dft
int addPixelCols = getOptimalDFTSize(image.cols);
// apply the optimal cols and rows size to the image
copyMakeBorder(image, padded, 0, addPixelRows - image.rows, 0, addPixelCols - image.cols, BORDER_CONSTANT, Scalar::all(0));
return padded;
}
3.由于只能在单通道处理,所以要分离图片多通道
//分离多通道获取B通道
- (cv::Mat)splitSrc:(cv::Mat) image {
//清空allPlanes
if (!allPlanes.empty()) {
allPlanes.clear();
}
//分离image通道到allPlanes
//先优化
Mat optimizeImage = [self optimizeImageDim:image];
split(optimizeImage,allPlanes);
Mat padded = Mat();
if (allPlanes.size()>1) {
for (int i = 0; i < allPlanes.size();i++) {
if (i == 0) {
// optimize the dimension of the loaded image
//分离之前优化,这里不需要优化
padded = allPlanes[i];
// padded = [self optimizeImageDim:allPlanes[i]];
break;
}
}
} else {
padded = [self optimizeImageDim:image];
}
return padded;
}
4.对图片进行傅里叶转换并在频谱上添加文本
- (void)transformImageWithText:(cv::Mat) image blindMarkText:(NSString *) blindMarkText point:(cv::Point) point fontSize:(double)fontSize scalar:(cv::Scalar) scalar {
// planes数组中存的通道数若开始不为空,需清空.
if (!planes.empty()) {
planes.clear();
}
Mat padded = [self splitSrc:image];
padded.convertTo(padded, CV_32F);
// prepare the image planes to obtain the complex image
planes.push_back(padded);
planes.push_back(cv::Mat::zeros(padded.size(), CV_32F));
// prepare a complex image for performing the dft
merge(planes, _complexImage);
// dft
dft(_complexImage, _complexImage);
// 频谱图上添加文本
putText(_complexImage, [blindMarkText UTF8String], point, CV_FONT_HERSHEY_DUPLEX, fontSize, scalar);
flip(_complexImage, _complexImage, -1);
putText(_complexImage, [blindMarkText UTF8String], point, CV_FONT_HERSHEY_DUPLEX, fontSize, scalar);
flip(_complexImage, _complexImage, -1);
planes.clear();
}
5.idft把处理过后的图片恢复成原图
- (cv::Mat)antitransformImage {
Mat invDFT ;
idft(_complexImage, invDFT, DFT_SCALE | DFT_REAL_OUTPUT, 0);
Mat restoredImage ;
invDFT.convertTo(restoredImage, CV_8U);
//合并多通道
allPlanes.erase(allPlanes.begin());
allPlanes.insert(allPlanes.begin(), restoredImage);
Mat lastImage ;
merge(allPlanes,lastImage);
return lastImage;
}
6.Mat转UIImage
- (UIImage *)UIImageFromCVMat:(cv::Mat)cvMat
{
NSData *data = [NSData dataWithBytes:cvMat.data length:cvMat.elemSize()*cvMat.total()];
CGColorSpaceRef colorSpace;
if (cvMat.elemSize() == 1) {
colorSpace = CGColorSpaceCreateDeviceGray();
} else {
colorSpace = CGColorSpaceCreateDeviceRGB();
}
CGDataProviderRef provider = CGDataProviderCreateWithCFData((__bridge CFDataRef)data);
CGImageRef imageRef = CGImageCreate(cvMat.cols, cvMat.rows,8, 8 * cvMat.elemSize(), cvMat.step[0],colorSpace, kCGImageAlphaNone|kCGBitmapByteOrderDefault, provider, NULL, false,kCGRenderingIntentDefault);
UIImage *finalImage = [UIImage imageWithCGImage:imageRef];
CGImageRelease(imageRef);
CGDataProviderRelease(provider);
CGColorSpaceRelease(colorSpace);
return finalImage;
}
到这里我们盲水印所需要的函数、方法已经写完,具体调用
- (void)fourierConversion {
cv::Mat orignMat = [self cvMatFromUIImage:[UIImage imageNamed:imageName]];
cv::Scalar color = CV_RGB(0,255,255);
[self transformImageWithText:orignMat blindMarkText:@"Test" point:cv::Point(45,45) fontSize:0.8 scalar:color];
cv::Mat cvMat = [self antitransformImage];
self.imgView.image = [self UIImageFromCVMat:cvMat];
}

图片.jpg
这时候你会发现图片和原来没什么区别。是的,确实肉眼看没有任何区别.
下边我们获取到水印:
1.创建优化级
- (cv::Mat)createOptimizedMagnitude:(cv::Mat)complexImage {
// init
vectornewPlanes = {};
Mat mag = Mat();
// split the comples image in two planes
split(complexImage, newPlanes);
// compute the magnitude
magnitude(newPlanes[0], newPlanes[1], mag);
// move to a logarithmic scale
add(Mat::ones(mag.size(), CV_32F), mag, mag);
// optionally reorder the 4 quadrants of the magnitude image
[self shiftDFT:mag];
// normalize the magnitude image for the visualization
// and OpenCV need images with value between 0 and 255
// convert back to CV_8UC1
mag.convertTo(mag, CV_8UC1);
normalize(mag, mag, 0, 255, NORM_MINMAX, CV_8UC1);
return mag;
}
2.转化DFT
- (void)shiftDFT:(cv::Mat)image {
image = image(cv::Rect(0, 0, image.cols & (-2), image.rows & (-2)));
int cx = image.cols / 2;
int cy = image.rows / 2;
Mat q0 = Mat(image, cv::Rect(0, 0, cx, cy));
Mat q1 = Mat(image, cv::Rect(cx, 0, cx, cy));
Mat q2 = Mat(image, cv::Rect(0, cy, cx, cy));
Mat q3 = Mat(image, cv::Rect(cx, cy, cx, cy));
Mat tmp = Mat();
q0.copyTo(tmp);
q3.copyTo(q0);
tmp.copyTo(q3);
q1.copyTo(tmp);
q2.copyTo(q1);
tmp.copyTo(q2);
}
3.转换图片获取水印图
- (cv::Mat)transformImage:(cv::Mat)image {
// planes数组中存的通道数若开始不为空,需清空.
if (!planes.empty()) {
planes.clear();
}
Mat padded = [self splitSrc:image];
padded.convertTo(padded, CV_32F);
// prepare the image planes to obtain the complex image
planes.push_back(padded);
planes.push_back(cv::Mat::zeros(padded.size(), CV_32F));
// prepare a complex image for performing the dft
merge(planes, _complexImage);
// dft
dft(_complexImage, _complexImage);
// optimize the image resulting from the dft operation
Mat magnitude = [self createOptimizedMagnitude:_complexImage];
planes.clear();
return magnitude;
}
获取水印具体调用:
- (void)reverseFourier {
cv::Mat cvMat = [self antitransformImage];
cvMat = [self transformImage:cvMat];
self.imgView.image = [self UIImageFromCVMat:cvMat];
}

盲水印.png
引用下别人的语言:
频域添加数字水印的方法,是指通过某种变换手段(傅里叶变换,离散余弦变换,小波变换等)将图像变换到频域(小波域),在频域对图像添加水印,再通过逆变换,将图像转换为空间域。相对于空域手段,频域手段隐匿性更强,抗攻击性更高。所谓对水印的攻击,是指破坏水印,包括涂抹,剪切,放缩,旋转,压缩,加噪,滤波等。数字盲水印不仅仅要敏捷性高(不被人抓到),也要防御性强(抗打)。就像Dota的敏捷英雄往往是脆皮,数字盲水印的隐匿性和鲁棒性是互斥的。(鲁棒性是抗攻击性的学术名字)。
有许多同学还是不懂,我把核心代码封成了库,需要的请自己去clone。
封装库地址:https://github.com/miaozhang9/opencvLib.git