Zynq 裸机 PS + PL 双网口实现之 lwip 库文件修改
修改对象
Xilinx Vivado 2017.4 库文件 lwip141_v2_0
新增功能
-
添加对 PHY 芯片 ksz9031 的支持;
-
添加 SDK 中 LWIP 参数设置对话框 emio_options 选项;
-
添加
XPAR_GMII2RGMIICON_0N_ETH0_ADDR和XPAR_GMII2RGMIICON_0N_ETH1_ADDR宏配置; -
支持 Zynq 裸机双网口通信实现
测试环境:
-
Windows 10,Vivado 2017.4
-
黑金 Zynq 7035 板卡,芯片型号:XC7Z035-2FFG676I
-
ETHERNET0 连接 PS 端网口,ETHERNET1 通过 EMIO 扩展连接 PL 端网口
修改内容:
1. 修改 lwip141_v2_0\src\contrib\ports\xilinx\netif\xaxiemacif_physpeed.c 文件
添加宏定义:
#define MICREL_PHY_IDENTIFIER 0x22
#define MICREL_PHY_KSZ9031_MODEL 0x220
添加 phy 芯片 ksz9031 速度获取函数:
unsigned int get_phy_speed_ksz9031(XAxiEthernet *xaxiemacp, u32 phy_addr)
{
u16 control;
u16 status;
u16 partner_capabilities;
xil_printf("Start PHY autonegotiation \r\n");
XAxiEthernet_PhyWrite(xaxiemacp,phy_addr, IEEE_PAGE_ADDRESS_REGISTER, 2);
XAxiEthernet_PhyRead(xaxiemacp, phy_addr, IEEE_CONTROL_REG_MAC, &control);
//control |= IEEE_RGMII_TXRX_CLOCK_DELAYED_MASK;
control &= ~(0x10);
XAxiEthernet_PhyWrite(xaxiemacp, phy_addr, IEEE_CONTROL_REG_MAC, control);
XAxiEthernet_PhyWrite(xaxiemacp, phy_addr, IEEE_PAGE_ADDRESS_REGISTER, 0);
XAxiEthernet_PhyRead(xaxiemacp, phy_addr, IEEE_AUTONEGO_ADVERTISE_REG, &control);
control |= IEEE_ASYMMETRIC_PAUSE_MASK;
control |= IEEE_PAUSE_MASK;
control |= ADVERTISE_100;
control |= ADVERTISE_10;
XAxiEthernet_PhyWrite(xaxiemacp, phy_addr, IEEE_AUTONEGO_ADVERTISE_REG, control);
XAxiEthernet_PhyRead(xaxiemacp, phy_addr, IEEE_1000_ADVERTISE_REG_OFFSET,
&control);
control |= ADVERTISE_1000;
XAxiEthernet_PhyWrite(xaxiemacp, phy_addr, IEEE_1000_ADVERTISE_REG_OFFSET,
control);
XAxiEthernet_PhyWrite(xaxiemacp, phy_addr, IEEE_PAGE_ADDRESS_REGISTER, 0);
XAxiEthernet_PhyRead(xaxiemacp, phy_addr, IEEE_COPPER_SPECIFIC_CONTROL_REG,
&control);
control |= (7 << 12); /* max number of gigabit attempts */
control |= (1 << 11); /* enable downshift */
XAxiEthernet_PhyWrite(xaxiemacp, phy_addr, IEEE_COPPER_SPECIFIC_CONTROL_REG,
control);
XAxiEthernet_PhyRead(xaxiemacp, phy_addr, IEEE_CONTROL_REG_OFFSET, &control);
control |= IEEE_CTRL_AUTONEGOTIATE_ENABLE;
control |= IEEE_STAT_AUTONEGOTIATE_RESTART;
XAxiEthernet_PhyWrite(xaxiemacp, phy_addr, IEEE_CONTROL_REG_OFFSET, control);
XAxiEthernet_PhyRead(xaxiemacp, phy_addr, IEEE_CONTROL_REG_OFFSET, &control);
control |= IEEE_CTRL_RESET_MASK;
XAxiEthernet_PhyWrite(xaxiemacp, phy_addr, IEEE_CONTROL_REG_OFFSET, control);
while (1) {
XAxiEthernet_PhyRead(xaxiemacp, phy_addr, IEEE_CONTROL_REG_OFFSET, &control);
if (control & IEEE_CTRL_RESET_MASK)
continue;
else
break;
}
xil_printf("Waiting for PHY to complete autonegotiation.\r\n");
XAxiEthernet_PhyRead(xaxiemacp, phy_addr, IEEE_STATUS_REG_OFFSET, &status);
while ( !(status & IEEE_STAT_AUTONEGOTIATE_COMPLETE) ) {
sleep(1);
XAxiEthernet_PhyRead(xaxiemacp, phy_addr, IEEE_STATUS_REG_OFFSET,
&status);
}
xil_printf("autonegotiation complete \r\n");
XAxiEthernet_PhyRead(xaxiemacp, phy_addr, 0x1f, &partner_capabilities);
if ( (partner_capabilities & 0x40) == 0x40)/* 1000Mbps */
return 1000;
else if ( (partner_capabilities & 0x20) == 0x20)/* 100Mbps */
return 100;
else if ( (partner_capabilities & 0x10) == 0x10)/* 10Mbps */
return 10;
else
return 0;
}
修改 get_IEEE_phy_speed 函数,添加对 ksz9031 的支持:
unsigned get_IEEE_phy_speed(XAxiEthernet *xaxiemacp)
{
u16 phy_identifier;
u16 phy_model;
u8 phytype;
#ifdef XPAR_AXIETHERNET_0_BASEADDR
u32 phy_addr = detect_phy(xaxiemacp);
/* Get the PHY Identifier and Model number */
XAxiEthernet_PhyRead(xaxiemacp, phy_addr, PHY_IDENTIFIER_1_REG, &phy_identifier);
XAxiEthernet_PhyRead(xaxiemacp, phy_addr, PHY_IDENTIFIER_2_REG, &phy_model);
/* Depending upon what manufacturer PHY is connected, a different mask is
* needed to determine the specific model number of the PHY. */
if (phy_identifier == MARVEL_PHY_IDENTIFIER) {
phy_model = phy_model & MARVEL_PHY_MODEL_NUM_MASK;
if (phy_model == MARVEL_PHY_88E1116R_MODEL) {
return get_phy_speed_88E1116R(xaxiemacp, phy_addr);
} else if (phy_model == MARVEL_PHY_88E1111_MODEL) {
return get_phy_speed_88E1111(xaxiemacp, phy_addr);
}
} else if (phy_identifier == TI_PHY_IDENTIFIER) {
phy_model = phy_model & TI_PHY_DP83867_MODEL;
phytype = XAxiEthernet_GetPhysicalInterface(xaxiemacp);
if (phy_model == TI_PHY_DP83867_MODEL && phytype == XAE_PHY_TYPE_SGMII) {
return get_phy_speed_TI_DP83867_SGMII(xaxiemacp, phy_addr);
}
if (phy_model == TI_PHY_DP83867_MODEL) {
return get_phy_speed_TI_DP83867(xaxiemacp, phy_addr);
}
}
else if(phy_identifier == MICREL_PHY_IDENTIFIER)
{
xil_printf("Phy %d is KSZ9031\n\r", phy_addr);
return get_phy_speed_ksz9031(xaxiemacp, phy_addr);
}
else {
LWIP_DEBUGF(NETIF_DEBUG, ("XAxiEthernet get_IEEE_phy_speed: Detected PHY with unknown identifier/model.\r\n"));
}
#endif
#ifdef PCM_PMA_CORE_PRESENT
return get_phy_negotiated_speed(xaxiemacp, phy_addr);
#endif
}
2. 修改 lwip141_v2_0\src\contrib\ports\xilinx\netif\xemacpsif_physpeed.c 文件
添加宏定义:
#define MICREL_PHY_IDENTIFIER 0x22
#define MICREL_PHY_KSZ9031_MODEL 0x220
添加 phy 芯片 ksz9031 速度获取函数:
static u32_t get_phy_speed_ksz9031(XEmacPs *xemacpsp, u32_t phy_addr)
{
u16_t temp;
u16_t control;
u16_t status;
u16_t status_speed;
u32_t timeout_counter = 0;
u32_t temp_speed;
u32_t phyregtemp;
xil_printf("Start PHY autonegotiation \r\n");
XEmacPs_PhyWrite(xemacpsp,phy_addr, IEEE_PAGE_ADDRESS_REGISTER, 2);
XEmacPs_PhyRead(xemacpsp, phy_addr, IEEE_CONTROL_REG_MAC, &control);
control |= IEEE_RGMII_TXRX_CLOCK_DELAYED_MASK;
XEmacPs_PhyWrite(xemacpsp, phy_addr, IEEE_CONTROL_REG_MAC, control);
XEmacPs_PhyWrite(xemacpsp, phy_addr, IEEE_PAGE_ADDRESS_REGISTER, 0);
XEmacPs_PhyRead(xemacpsp, phy_addr, IEEE_AUTONEGO_ADVERTISE_REG, &control);
control |= IEEE_ASYMMETRIC_PAUSE_MASK;
control |= IEEE_PAUSE_MASK;
control |= ADVERTISE_100;
control |= ADVERTISE_10;
XEmacPs_PhyWrite(xemacpsp, phy_addr, IEEE_AUTONEGO_ADVERTISE_REG, control);
XEmacPs_PhyRead(xemacpsp, phy_addr, IEEE_1000_ADVERTISE_REG_OFFSET,
&control);
control |= ADVERTISE_1000;
XEmacPs_PhyWrite(xemacpsp, phy_addr, IEEE_1000_ADVERTISE_REG_OFFSET,
control);
XEmacPs_PhyWrite(xemacpsp, phy_addr, IEEE_PAGE_ADDRESS_REGISTER, 0);
XEmacPs_PhyRead(xemacpsp, phy_addr, IEEE_COPPER_SPECIFIC_CONTROL_REG,
&control);
control |= (7 << 12); /* max number of gigabit attempts */
control |= (1 << 11); /* enable downshift */
XEmacPs_PhyWrite(xemacpsp, phy_addr, IEEE_COPPER_SPECIFIC_CONTROL_REG,
control);
XEmacPs_PhyRead(xemacpsp, phy_addr, IEEE_CONTROL_REG_OFFSET, &control);
control |= IEEE_CTRL_AUTONEGOTIATE_ENABLE;
control |= IEEE_STAT_AUTONEGOTIATE_RESTART;
XEmacPs_PhyWrite(xemacpsp, phy_addr, IEEE_CONTROL_REG_OFFSET, control);
XEmacPs_PhyRead(xemacpsp, phy_addr, IEEE_CONTROL_REG_OFFSET, &control);
control |= IEEE_CTRL_RESET_MASK;
XEmacPs_PhyWrite(xemacpsp, phy_addr, IEEE_CONTROL_REG_OFFSET, control);
while (1) {
XEmacPs_PhyRead(xemacpsp, phy_addr, IEEE_CONTROL_REG_OFFSET, &control);
if (control & IEEE_CTRL_RESET_MASK)
continue;
else
break;
}
XEmacPs_PhyRead(xemacpsp, phy_addr, IEEE_STATUS_REG_OFFSET, &status);
xil_printf("Waiting for PHY to complete autonegotiation.\r\n");
while ( !(status & IEEE_STAT_AUTONEGOTIATE_COMPLETE) ) {
sleep(1);
XEmacPs_PhyRead(xemacpsp, phy_addr,
IEEE_COPPER_SPECIFIC_STATUS_REG_2, &temp);
timeout_counter++;
if (timeout_counter == 30) {
xil_printf("Auto negotiation error \r\n");
return;
}
XEmacPs_PhyRead(xemacpsp, phy_addr, IEEE_STATUS_REG_OFFSET, &status);
}
xil_printf("autonegotiation complete \r\n");
XEmacPs_PhyRead(xemacpsp, phy_addr,0x1f,
&status_speed);
if ( (status_speed & 0x40) == 0x40)/* 1000Mbps */
return 1000;
else if ( (status_speed & 0x20) == 0x20)/* 100Mbps */
return 100;
else if ( (status_speed & 0x10) == 0x10)/* 10Mbps */
return 10;
else
return 0;
return XST_SUCCESS;
}
修改 get_IEEE_phy_speed 函数,添加对 ksz9031 的支持:
static u32_t get_IEEE_phy_speed(XEmacPs *xemacpsp, u32_t phy_addr)
{
u16_t phy_identity;
u32_t RetStatus;
XEmacPs_PhyRead(xemacpsp, phy_addr, PHY_IDENTIFIER_1_REG,
&phy_identity);
if(phy_identity == MICREL_PHY_IDENTIFIER)
{
RetStatus = get_phy_speed_ksz9031(xemacpsp, phy_addr);
}
else if (phy_identity == PHY_TI_IDENTIFIER) {
RetStatus = get_TI_phy_speed(xemacpsp, phy_addr);
} else {
RetStatus = get_Marvell_phy_speed(xemacpsp, phy_addr);
}
return RetStatus;
}
修改 lwip141_v2_0\data\lwip141.mld 文件
添加如下字段:
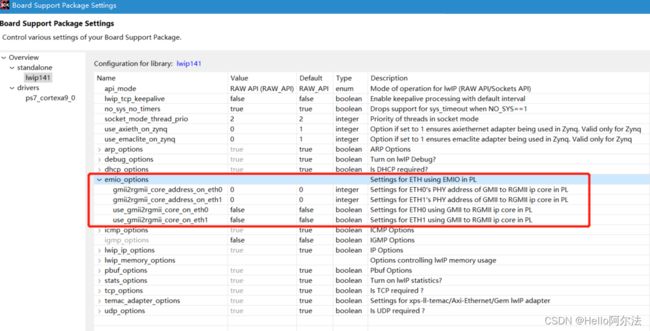
BEGIN CATEGORY emio_options
PARAM name = emio_options, desc = "Settings for ETH using EMIO in PL";
PARAM name = use_gmii2rgmii_core_on_eth0, desc = "Settings for ETH0 using GMII to RGMII ip core in PL", type = bool, default = false;
PARAM name = use_gmii2rgmii_core_on_eth1, desc = "Settings for ETH1 using GMII to RGMII ip core in PL", type = bool, default = false;
PARAM name = gmii2rgmii_core_address_on_eth0, desc = "Settings for ETH0's PHY address of GMII to RGMII ip core in PL", type = int, default = 0;
PARAM name = gmii2rgmii_core_address_on_eth1, desc = "Settings for ETH1's PHY address of GMII to RGMII ip core in PL", type = int, default = 0;
END CATEGORY
SDK Bsp‘s Settins 效果如图所示:
3. 修改 lwip141_v2_0\data\lwip141.tcl 文件
在 proc generate_lwip_opts {libhandle} 所在的大括号内添加如下字段:
# EMIO options
set use_gmii2rgmii_core_on_eth0 [common::get_property CONFIG.use_gmii2rgmii_core_on_eth0 $libhandle]
set use_gmii2rgmii_core_on_eth1 [common::get_property CONFIG.use_gmii2rgmii_core_on_eth1 $libhandle]
set gmii2rgmii_core_address_on_eth0 [common::get_property CONFIG.gmii2rgmii_core_address_on_eth0 $libhandle]
set gmii2rgmii_core_address_on_eth1 [common::get_property CONFIG.gmii2rgmii_core_address_on_eth1 $libhandle]
if { $use_gmii2rgmii_core_on_eth0 == true } {
puts $lwipopts_fd "\#define XPAR_GMII2RGMIICON_0N_ETH1_ADDR $gmii2rgmii_core_address_on_eth0"
}
if { $use_gmii2rgmii_core_on_eth1 == true } {
puts $lwipopts_fd "\#define XPAR_GMII2RGMIICON_0N_ETH1_ADDR $gmii2rgmii_core_address_on_eth1"
}