UESTC人工智能 期末复习
目录
Part 0 AI历史
Part 1 图搜索算法
图搜索一般过程
深度优先搜索DFS
广度优先搜素BFS
DFS和BFS的区别
一致代价搜索UCS
Greedy Search
⚠A* Search
Part 2 对抗搜索 Adversarial Search
Minimax for Zero-Sum Games
估值函数evaluation function
⚠α β剪枝
Part3 MDP
价值迭代 Value Iteration
固定策略 Fixed Policies
策略提取 Policy Extraction
策略迭代 Policy Iteration
策略迭代和价值迭代的比较
⚠例 迷宫寻宝问题
Part 4 强化学习 Reinforcement Learning
Offline (MDPs) vs. Online (RL)
基于模型的学习 Model-Based Learning
无模型学习 Model-Free Learning
直接评估 direct evaluation
时间差分学习 Temporal Difference Learning
主动强化学习 Active Reinforcement Learning
Q值迭代 Q-Value Iteration
Q-Learning算法
Part 5 一阶逻辑
推理
命题
原子公式
连词和量词
等价关系
永真蕴含式
置换与合一
消解原理 resolution principle
鲁滨逊归结原理
Part 6 概率 probabiliity
概率公式
⚠例
Part 7 贝叶斯网络 bayes nets
概率判断独立性
⚠Active / Inactive Paths 判断独立性
贝叶斯网络中的条件概率
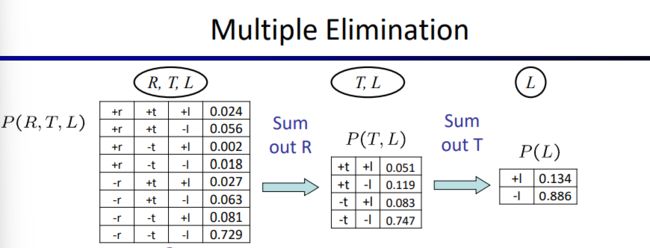
多重连接和多重消除 Multiple Joins & Multiple Elimination
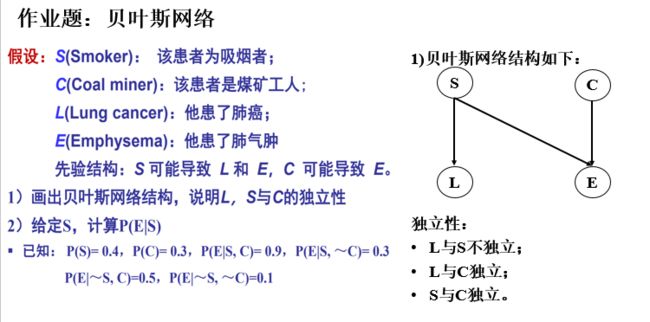
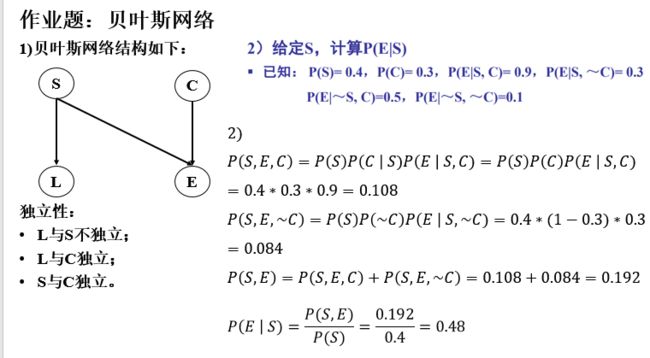
⚠作业题
Part 8 机器学习 ML
监督学习 vs 无监督学习
回归 vs 分类 Regression vs Classification
训练集 vs 测试集 vs验证集
泛化和过拟合 Generalization & Overfitting
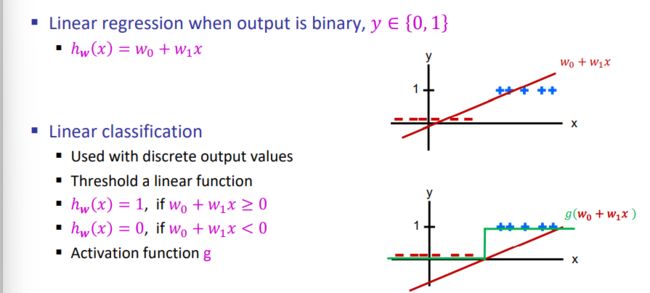
线性分类器 Linear Classifiers
激活函数 - 概率决策
⚠线性回归
决策树 Decision Trees
决策树构建递归退出条件C
信息熵 Entropy
信息增益 Information Gain
⚠ID3算法实例
Part 0 AI历史
人工智能三大流派
- 行为学派:智能体、强化学习
- 符号学派:逻辑理论家、知识库系统
- 计算学派:神经网络、深度学习
1950年图灵提出 “ 计算机与智能” Computing Machinery and Intelligence
1956年达特茅斯会议提出 “人工智能”
Part 1 图搜索算法
图搜索一般过程
- 建立一个只含有起始节点S的搜索图G,把S放到一个叫做OPEN 的未扩展节点表中
- 建立一个叫做CLOSED的已扩展节点表,其初始为空表
- LOOP:若OPEN表是空表,则失败退出
- 选择OPEN表上的第一个节点,把它从OPEN表移出并放进CLOSED表中。称此节点为节点n
- 若n为目标节点,则有解并成功退出,此解是追踪图G中沿着指针从n到S这条路径而得到的(指针将在第7步中设置)
- 扩展节点n,同时生成不是n的祖先的那些后继节点的集合M。把M的这些成员作为n的后继节点添入图G中
- n生成并记入M的子节点有以下三种情况:
- 未曾在G中出现过的每个M成员:设置一个通向n的指针,并把它们加进OPEN表
- 已经在OPEN表上的每一个M成员,确定是否需更改通到n的指针方向。
- 已在CLOSED表上的每一个M成员:除需确定该子节点指向父节点的指针外,还需确定其后继节点指向父节点的指针(也就是,如该子节点的父节点根据需要(如代价值等)改变了,那就把该 子节点移回Open表)
- 按某一任意方式或按某个探试值,重排OPEN表
- GO LOOP

深度优先搜索DFS
完备性:否
最优解:否
广度优先搜素BFS

完备性:是
最优解:只有当每一步的cost都为1时才一定保证求得的解最优
DFS和BFS的区别
| 广度优先搜索(BFS) | 深度优先搜索(DFS) |
| BFS在Graph中逐级访问节点。 | DFS访问图深度明智的节点。 它会访问节点,直到到达叶或没有未访问节点的节点为止。 |
| 在开始任何其他节点之前,必须先充分探究一个节点。 | 一旦发现另一个未探索节点,就会暂停对该节点的探索。 |
| 使用队列数据结构存储未探索的节点。 | 使用堆栈数据结构存储未探索的节点。 |
| BFS较慢,需要更多的内存。 | DFS更快并且需要更少的内存。 |
一些应用:
|
一些应用:
|
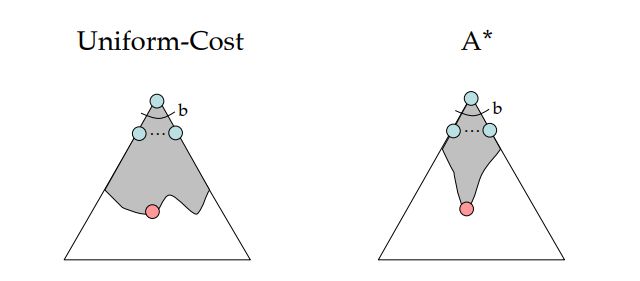
一致代价搜索UCS
一致代价搜索是在BFS上进行扩展的,也被成为代价一致搜索,他的基本原理是:一致代价搜索总是扩展路径消耗最小的节点N。N点的路径消耗等于前一节点N-1的路径消耗加上N-1到N节点的路径消耗。

完备性:是
最优解:是
Greedy Search
每次选择到目前节点cost估值最小的子节点
由于估计值的选择问题,搜索结果不一定最优
完备性:否
最优解:否
⚠A* Search
A*是UCS和Greedy的结合体
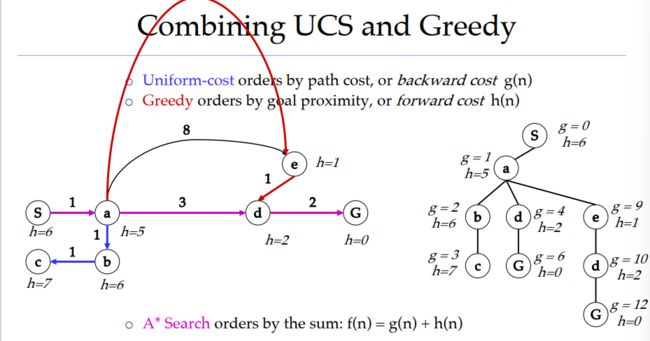
估值函数:f(n)=g(n)+h(n)
其中g(n)表示从起始搜索点到当前点的代价,需大于0;h(n)表示当前节点到目标节点的估值,需小于等于实际代价
使用OPEN表和CLOSED表进行搜索
启发式搜索
启发式搜索是指利用当前与问题有关的信息作为启发式信息,这些信息是能够提升查找效率以及减少查找次数的。包括Greedy和A*搜索
Part 2 对抗搜索 Adversarial Search
零和游戏 Zero-Sum Games:
智能体之间具有对立的value,一个最大化value一个最小化value,对抗性的纯竞争
一般游戏 General Games:
智能体之间有独立的value,智能体竞争、合作或者互不影响都有可能
Minimax for Zero-Sum Games
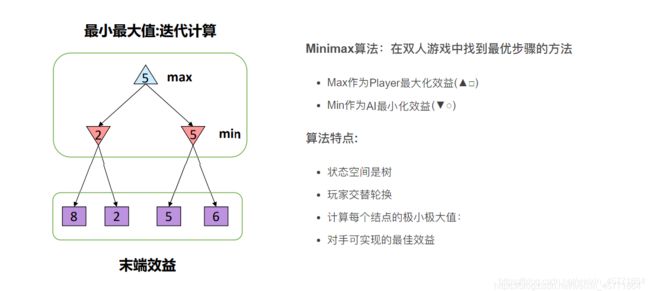
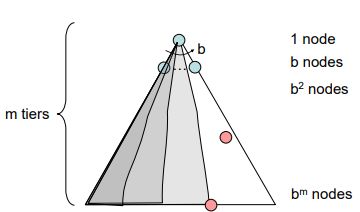
Game tree 的大小主要由两个数字决定:
- 分支因子b: 代表了游戏典型的每步走棋的可行(合法)走法
- 特征深度m: 游戏典型的走棋步数/深度
很容易得出,一个游戏的 Game tree 的大小,约为 b^m
估值函数evaluation function
目的:减小特征深度m
我们构造一个所谓的估值函数(evaluation function),它的目的是估计某个局面的 Minimax 评分,这样我们我们就不用搜索到终盘才能得知结果。一般而言,越接近终盘估计会越准确(因为游戏往往越到残局越简单),所以估值函数不能完全替代搜索
⚠α β剪枝
目的:减小分支因子b
参考链接 :
CS 161 Recitation Notes - Minimax with Alpha Beta Pruning (ucla.edu)
怎样做一道阿尔法贝塔剪枝的题(图解)_Sacredness的博客-CSDN博客_阿尔法贝塔剪枝
局限性:在现实游戏中,无法搜索到叶子节点
解决方案:限制搜索深度
Part3 MDP
MDP是一个五元组
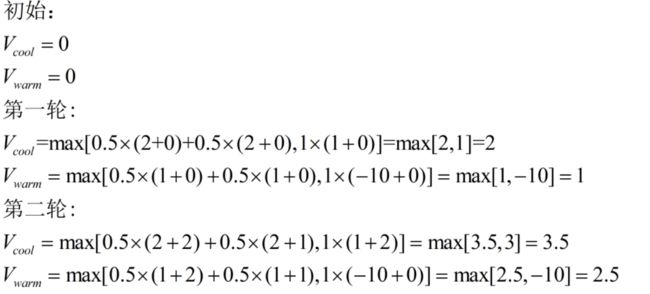
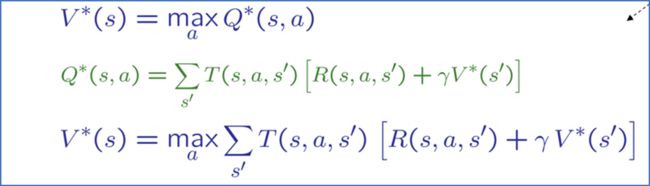
价值迭代 Value Iteration
对于采取某一动作Q值的计算,一般可以理解为:采取某一动作的reward+下一状态的V值,如果可能进入多个状态,那么就按照概率加权

例一:
值迭代缺点:
- 速度慢——每次迭代时间复杂度 O(S2A)
- 每个状态的“最大值”很少改变
- policy通常早在values之前收敛
固定策略 Fixed Policies
固定每一步的action由函数π(s)得到,那么V值计算如下,其实和价值迭代没太大区别

策略提取 Policy Extraction
在知道每一步的最优价值V*(s)时,还需要进行一个arg max()操作来求得执行哪个action会得到此最优价值




策略迭代 Policy Iteration
包括两部分:
策略评估:对于固定策略π ,通过策略评估得到V值,迭代直至v值收敛

策略提升:对于固定策略的V值,使用策略提取获得更好的策略:

局限:在不知道T和R时无法更新V
idea:对结果 s'(通过做动作!)和平均值进行采样

策略迭代和价值迭代的比较
两者本质上都是计算最优value,都是用于解决MDP的动态程序
价值迭代:
- 每次迭代都更新value和policy
- 不跟踪policy,但在选择最大Q值时会隐式的重新计算他
策略迭代:
- 使用固定策略进行了几次更新实用程序的传递(每次传递都很快,因为我们只考虑一个动作,而不是所有动作)
- After the policy is evaluated, a new policy is chosen(慢如值迭代传递)
- 新policy会更优
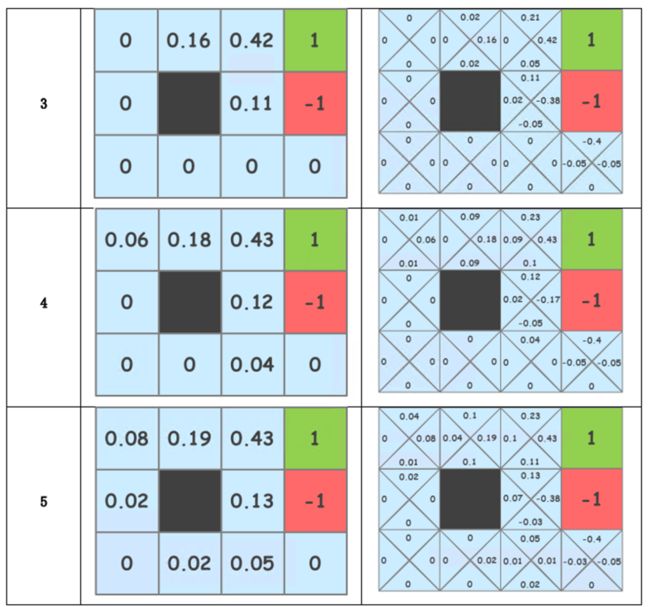
⚠例 迷宫寻宝问题

生存奖励为0代表每一步的R为0
先计算Q表,再算V表,从非0的位置扩散
gamma=1
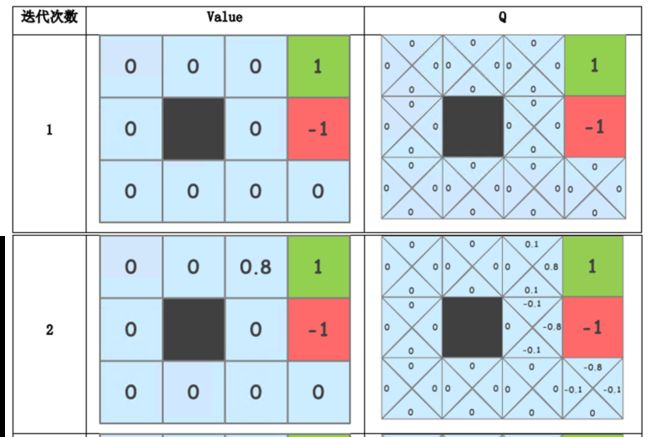
2 - 右上角:
上移Q=0.8×0+0.1×0+0.1×1=0.1
下移Q=0.8×0+0.1×0+0.1×1=0.1
左移Q=0.8×0+0.1×0+0.1×0=0
右移Q=0.8×1+0.8×0+0.8×0=0.8

gamma=0.5
上移Q=0.5×0.8×0+0.5×0.1×0+0.5×0.1×1=0.05
下移Q=0.5×0.8×0+0.5×0.1×0+0.5×0.1×1=0.05
左移Q=0.5×0.8×0+0.5×0.1×0+0.5×0.1×0=0
右移Q=0.5×0.8×1+0.5×0.8×0+0.5×0.8×0=0.4
Part 4 强化学习 Reinforcement Learning
Offline (MDPs) vs. Online (RL)

基于模型的学习 Model-Based Learning
step1.通过training过程,计算状态转移矩阵T()和动作reward R(),通过学习得到经验MDP模型
step2. 使用价值迭代或策略迭代求解最优values

无模型学习 Model-Free Learning
学习者无法选择采取什么行动,跟着给的固定策略π走,执行策略并学习经验
Simplified task: policy evaluation
- Input: a fixed policy π(s)
- You don’t know the transitions T(s,a,s’)
- You don’t know the rewards R(s,a,s’)
- Goal: learn the state values
直接评估 direct evaluation
目标:计算在策略π下每个状态的value
实现:按照π采取行动,对于某个state,记下每个Episode中从他开始到结束的折扣奖励的总和,最后平均这些sample

计算过程:
A = [-10] / 1 =10
B = [(-1-1+10)+(-1-1+10)]/2 = +8
C = [(-1+10)+(-1+10)+(-1+10)+(-1-10)]/4 = +4
D = [10+10+10]/3 = +10
E = [(-1-1+10)+(-1-1-10)]/2 = -2
优点:简单易理解;不需要计算T、R;最终你那个计算出正确的平均value
缺点:浪费了状态连接的信息,每个状态必须单独学习,会花费较长时间学习
时间差分学习 Temporal Difference Learning
Big idea: learn from every experience!
每经历一个转换(s, a, s', r)时更新 V(s)
可能的结果将更频繁地提供更新
policy依然固定,仍然在进行策略评估

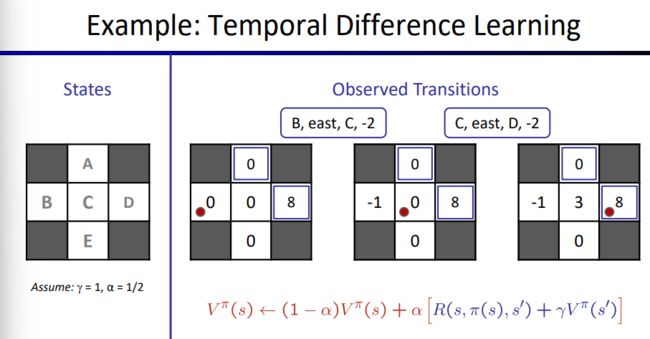
计算过程:

主动强化学习 Active Reinforcement Learning
照样不知道T,R,但是现在可以让智能体自己做出选择!
基本权衡:探索与开发,是选择基于已有经验选择老路还是进行随机贪婪探索选择新路?
Q值迭代 Q-Value Iteration
对比value迭代,初始化V0(S)=0

Q_value迭代初始化Q0(s,a)=0

Q-Learning算法
基于Q-value迭代,类似于时间差分学习
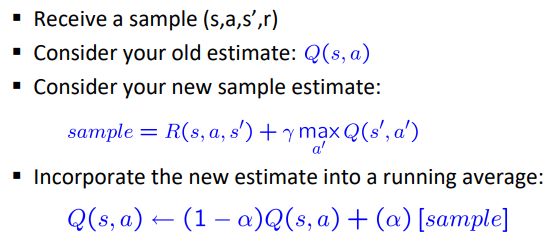
其中maxQ(s',a')是在下一状态 s' 的最大Q值

Part 5 一阶逻辑
推理
定义:推理就是按照某种策略从已知事实和知识推出结论的过程。
按推理的逻辑基础分类:
演绎推理:从一般到个别 ,三段论法(大前提、小前提、结论)
归纳推理:从个别到一般,从大量特殊实例出发,归纳出一般性结论
按所用知识的确定性分类:
确定性推理:所用的知识和证据都是确定的,要么为真要么为假,没有第三种情况
不确定性推理:不确定的
按推理中所用知识是否具有启发性分类:
启发式推理:效率高
非启发式推理:效率低
命题
命题的定义:
- 断言:一个陈述句称为一个断言(assertion)
- 命题(proposition):具有真假意义的断言
命题的真值:
- T:命题的意义为真
- F:命题的意义为假
命题真值的说明
- 一个命题不能同时既为真又为假
- 一个命题可在一定条件下为真,而在另一条件下为假
原子公式
定义:由谓词符号和若干项组成的谓词演算。项包括: 常量符号、变量符号、函数符号等。
定义原子公式为真值或假值就表示了某种语义(semantics)。
若t1 , t2 , …, tn是项,P是谓词,则称P(t1 ,t2 ,…,tn )为原子谓词公式(原子公式)。
无变量的原子公式取值确定,包含变量的原子公式取值不定。
例如:“机器人(ROBOT)在1号房间(room1)内”
INROOM(ROBOT,room1) 为真
INROOM(ROBOT,room2)为假
连词和量词
1. 与、合取(conjunction):用连词∧把几个公式连接起来而构成的公式。
合取项是合取式的每个组成部分。
例:LIKE(I,MUSIC)∧LIKE(I,PAINTING) (我喜爱音乐和绘画。)
2. 或、析取(disjunction):用连词∨把几个公式连接起来而构成的公式。
析取项是析取式的每个组成部
例:PLAYS(LILI,BASKETBALL)∨PLAYS(LILI,FOOTBALL) (李力打篮球或踢足球。)
3. 蕴涵(Implication):“→”表示“如果—那么”(IF—THEN)关系,其所构成 的公式叫做蕴涵。
4. 非(Not)表示否定,¬、~均可表示
连词的优先级 : ¬, ∧, ∨,![]() , →, ↔
, →, ↔
合式公式的真值表

等价关系
等价(Equivalence): 如果两个合式公式,无论如何解释,其真值表都 是相同的,那么我们就称此两合式公式是等价的。

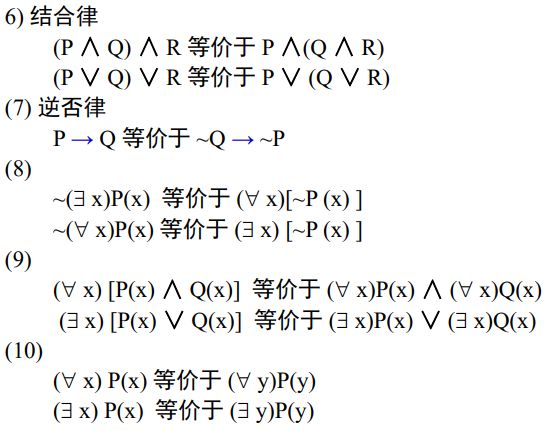
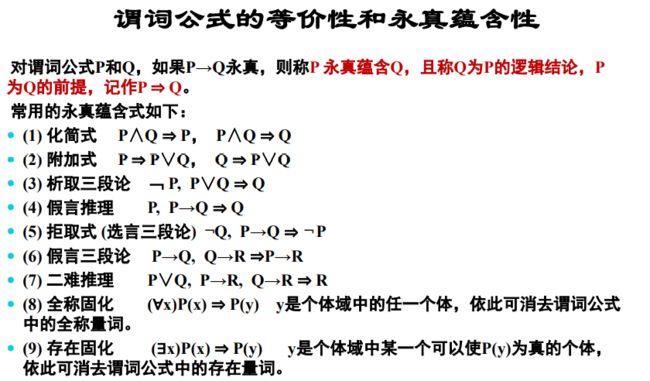
永真蕴含式
置换与合一
置换定义:置换是形如{t1 /x1 ,t2 /x2 ,…,tn /xn }的有限集合,其中t1 ,t2 ,…,tn是项;x1 ,x2 ,…,xn 是互不相同的变元;ti /xi 表示用项ti 替换变元xi 。
要求:ti与xi 不能相同,xi 不能循环地出现在另一个ti 中。
例如:{a/x, c/y, f(b)/z} 是一个置换, 但 {g(z)/x, f(x)/z}不是一个置换,原因是x和z之间出现了循环置换现象,若改为{g(a)/x, f(x)/z}即可
设θ={t1 /x1 ,t2 /x2 ,…,tn /xn }是一个置换,F是一个谓词公式, 把公式F中出现的所有xi 换成ti(i=1,2,…,n),得到一个新的公式G, 称G为F在置换θ 下的例示,记作G=Fθ
置换的合成(了解)


合一定义:设有公式集F={F1 , F2 ,…,Fn },若存在一个置换θ,可使 F1θ=F2θ=…=Fnθ, 则称θ是F的一个合一。称F1 ,F2 ,…,Fn是可合一的。
例:
设有公式集F={P(x, y, f(y)), P(a, g(x), z)},则 λ={a/x, g(a)/y, f(g(a))/z} 是它的一个合一。
一般情况下,一个公式集的合一不惟一。
最一般合一:设σ是谓词公式集F的一个合一,如果对F的任意一个合一θ都存在一个置换λ,使得 θ= σ· λ,则称σ是一个最一 般(或最简单)合一
消解原理 resolution principle
定义:对谓词演算公式进行分解、化简,消去一些符号, 以求得导出子句,又称归结。
消解过程:消解规则应用于母体子句对, 以便产生导出子句

鲁滨逊归结原理
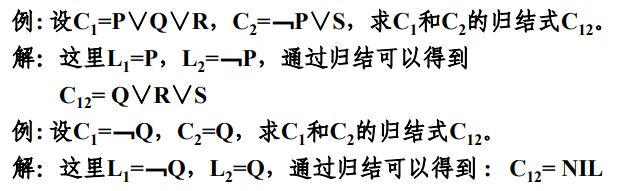
核心:两个子句的归结式、
定义1:若P是原子谓词公式,则称P与﹁P为互补文字
定义2:设C1和C2是子句集中的任意两个子句,如果C1中的文字L1与C2中的文字L2互补,那么可从C1和C2中分别消去L1和L2,并将C1和C2中余下的部分按析取关系构成一个新的子句C12,则称这一过程为归结,称C12为C1和C2的归结式,称C1和C2为C12的亲本(父辈)子句
Part 6 概率 probabiliity
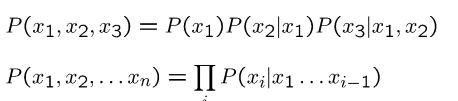
概率公式

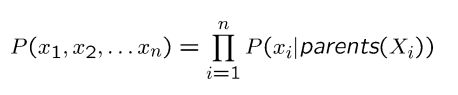
链式条件概率:
例1:

⚠例
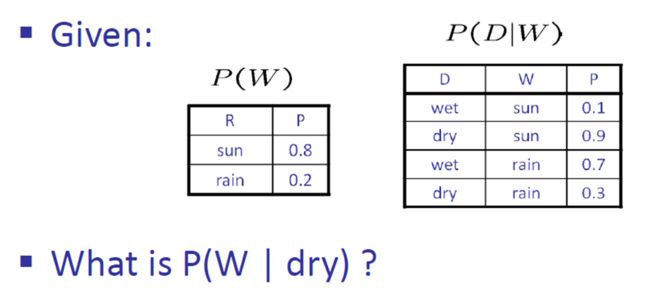
首先明确,P(W | dry)是一个概率分布,而不是一个概率值。不能写成 P(W | dry)=....
①求联合概率分布P(D,W);
②求边缘概率分布)P(D);
③求条件概率分布P(W | D).

| P(W | dry) |
||
| D |
W |
P |
| dry |
sun |
0.9231 |
| dry |
rain |
0.0769 |
Part 7 贝叶斯网络 bayes nets
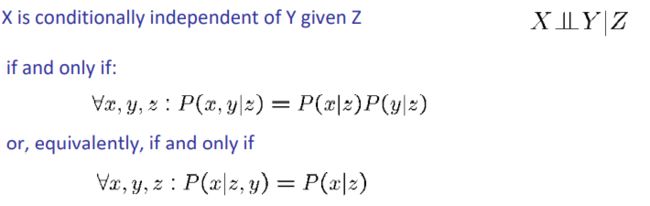
概率判断独立性
判断独立性的重要公式:

条件独立性:
⚠Active / Inactive Paths 判断独立性
要判断X,Y的独立性:
1. 找到X到Y的所有路径paths
2. 如果一个path的所有三元组都是active那么此path就是active
3.若存在一个path为active,那么X、Y就是非独立的,反之独立
简言之:找到一条path的所有三元组都是active那么就非独立;
若只存在一条路径,那么找到一个inactive的三元组就独立,如果全部active才非独立
可以把X、Y理解为两个水池,如果有一根连通水管(path)里的开关全打开了(active)那么二者连通,不独立(independence);如果就只有一根水管连接,那么只要有一个开关被关闭(inactive)那么就独立。
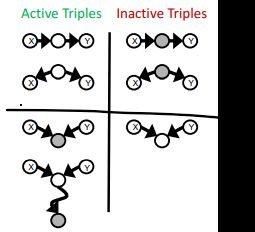
只需要记间接因果和同因是active,其他三个对立的象限自己就出来了
25-bn (washington.edu)
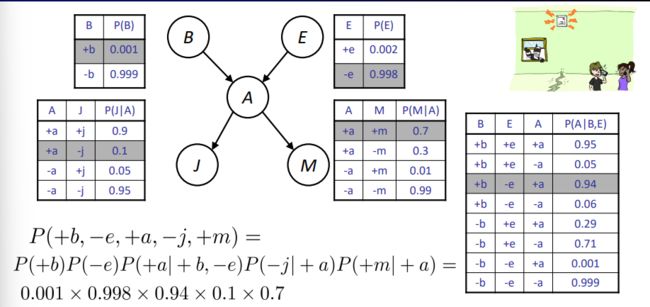
贝叶斯网络中的条件概率
例:
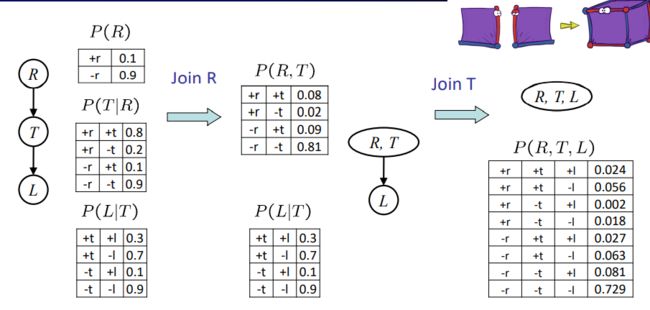
多重连接和多重消除 Multiple Joins & Multiple Elimination
⚠作业题
Part 8 机器学习 ML
监督学习 vs 无监督学习
监督学习:输入已知类别的数据样本 分类、回归
无监督学习:输入未知类别的数据样本 聚类
回归 vs 分类 Regression vs Classification
分类:对输入数据进行离散值标签的预测
回归:预测连续的、具体的数值
Output: 连续 vs 离散
分类需要激活函数
训练集 vs 测试集 vs验证集
训练集用于学习参数(例如模型概率)
测试集用于计算模型的准确率
验证集用于调节超参数
泛化和过拟合 Generalization & Overfitting
在有监督学习中,我们会在训练数据集上建立一个模型,之后会把这个模型用于新的,之前从未见过的数据中,这个过程称为模型的泛化
模型在训练集上表现好,在测试集验证集表现差就说明出现了过拟合问题,出现这种情况的主要原因是训练数据中存在噪音或者训练数据太少
解决办法:选取合适的停止训练标准;使用验证数据集;获取额外数据进行交叉验证;正则化
Relative frequency parameters will overfit the training data
相对频率参数会过拟合训练数据
线性分类器 Linear Classifiers
输入特征向量 f(x)
权重 向量 w
在二分类中:
真实标签为 y*∈{-1,1},
预测标签为 y ,w和f(x)在同一平面则为正样本,y=1

如果分类正确,不更新w,分类错误则更新 w
w = w + y* · f(x) 其中y* = 1或-1

在多分类中:
输入特征向量 f(x)
每个类别的权重 向量 
预测标签为 y ,取 最大的一个类别标签
最大的一个类别标签

如果分类正确,不更新w;分类错误则更新 w,此时需要分别对正确和错误的两个w进行更新
关键点:减小错分类别的向量点积,增大真实类别的向量点积


激活函数 - 概率决策


⚠线性回归


L2 loss:所有样本的平方误差和

internati
例:



决策树 Decision Trees
决策树构建递归退出条件C
- 当前样本集D包含的样本属于同一类别C
- 当前属性集A为空或样本集D中所有样本在所有属性上取值相同(但类别可能不相同)
- 当前结点包含的样本集
 为空
为空
信息熵 Entropy
信息熵是度量样本集合纯度的指标
假定当前样本集合D中第k类样本所占比例为pk(k=1,2,...,|y|)则D的信息熵的定义为:

Ent(D)的取值范围为 [0,log2|y| ],值越小,纯度越高
计算信息熵时约定:若p=0,则 =0
=0
信息增益 Information Gain
样本集D的某个离散属性a有V个可能的取值 ,用a来对D进行划分则会产生V个分支结点,其中第v个分支结点包含了D中所有在在属性a上取值为
,用a来对D进行划分则会产生V个分支结点,其中第v个分支结点包含了D中所有在在属性a上取值为 的样本,记为
的样本,记为 。定义用属性a对样本集D进行划分所获得的信息增益为:
。定义用属性a对样本集D进行划分所获得的信息增益为:

一般而言,信息增益越大,意味着使用属性a来进行划分获得的纯度提升越大
在ID3算法中选择信息增益大的属性来划分样本集
⚠ID3算法实例




