Jetson AGX Orin 安装ROS Noetic
目录
平台
安装Anaconda
安装Pytorch
安装ROS Noetic
平台
硬件:NVIDIA Jetson AGX Orin Devkit
软件:JetPack5.0.2
安装Anaconda
1. 进入Anaconda下载页面
2. 选择下载64-Bit (AWS Graviton2 / ARM64) Installer(即ARM64版本)
3. 在Jetson 终端输入: $bash Anaconda3-XXX-aarch64.sh
4. 根据提示一直键入yes、按回车并安装完成
5. 创建conda环境
conda create -n fros python=3.86. 启动conda环境
conda activate fros安装Pytorch
请严格参考NVIDIA Forum上连接内容,参考安装即可,如有问题可交流
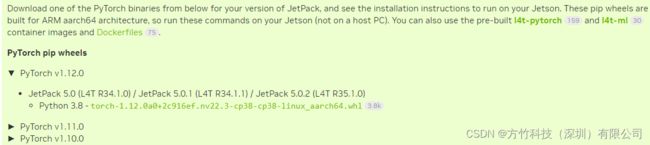
安装Torch(v1.12.0)
$wget https://developer.download.nvidia.com/compute/redist/jp/v50/pytorch/torch-1.12.0a0+2c916ef.nv22.3-cp38-cp38-linux_aarch64.whl
$sudo apt-get install python3-pip libopenblas-base libopenmpi-dev libomp-dev
$pip3 install Cython
$pip3 install numpy torch-1.12.0a0+2c916ef.nv22.3-cp38-cp38-linux_aarch64.whl安装Torchvision (v0.13.0)
$ sudo apt-get install libjpeg-dev zlib1g-dev libpython3-dev libavcodec-dev libavformat-dev libswscale-dev
$ git clone --branch v0.13.0 https://github.com/pytorch/vision torchvision
$ cd torchvision
$ export BUILD_VERSION=0.13.0 # where 0.x.0 is the torchvision version
$ python3 setup.py install --user
$ cd ../ # attempting to load torchvision from build dir will result in import error验证是否安装完成可参考:
(mywks) nvidia@orin:~$ python3
Python 3.8.16 (default, Jan 17 2023, 22:24:15)
[GCC 11.2.0] :: Anaconda, Inc. on linux
Type "help", "copyright", "credits" or "license" for more information.
>>> import torch
>>> import torchvision
>>> print(torchvision.__version__)
>>> print(torch.__version__)
>>> print('CUDA available: ' + str(torch.cuda.is_available()))
>>> print('cuDNN version: ' + str(torch.backends.cudnn.version()))
>>> a = torch.cuda.FloatTensor(2).zero_()
>>> print('Tensor a = ' + str(a))
>>> b = torch.randn(2).cuda()
>>> print('Tensor b = ' + str(b))
>>> c = a + b
>>> print('Tensor c = ' + str(c))
>>>

安装ROS Noetic
添加源:packages.ros.org
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'设置Keys
sudo apt install curl # if you haven't already installed curl
curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -安装最新的Packages
sudo apt update安装ROS-Noetic-desktop
sudo apt install ros-noetic-desktop-full配置每次开机启动新的Shell时设置脚本将自动搭建ROS环境
#Bash shell
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc#zsh shell
echo "source /opt/ros/noetic/setup.zsh" >> ~/.zshrc
source ~/.zshrc安装 包依赖
sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential python3-rosdep初始化 rosdep
sudo rosdep init
rosdep update微信交流号: shenzhukeji