golangの并发编程(GMP模型)
GMP模型 && channel
- 1. 前言
- 2. GMP模型
-
- 2.1. 基本概念
- 2.2. 调度器策略
- 2.3. go指令的调度流程
- 2.4. go启动周期的M0和G0
- 2.5. GMP可视化
- 2.6. GMP的几种调度场景
- 3. channel
-
- 3.1. channel的基本使用
- 3.2. 同步器
1. 前言
Go中的并发是函数相互独立运行的体现,Goroutines是并发运行的函数。
- 并发:多线程程序在单核CPU上执行,每个线程使用时间片轮转执行,间隔是ms级别的
- 并行: 多线程程序在多核CPU上执行,每个cpu上都执行一个线程,同一时刻有多个线程执行
- go主线程是一个物理线程(内核态),可以发起多个协程goroutine,协程是一个轻量级线程(逻辑态)
- goroutine的特点:有独立的栈空间;共享程序堆空间;调度由用户控制
- 创建一个协程:
go 任务函数
2. GMP模型
2.1. 基本概念
M:代表内核线程,记录内核线程栈信息,当goroutine调度到线程时,使用该goroutine自己的栈信息
P:调度器processor,负责调度goroutine,维护一个本地goroutine队列,主线程从调度器上获得goroutine并执行,同时还负责部分内存的管理。
G:表示goroutine,每个goroutine都有自己的栈空间,定时器,初始化的栈空间在2k左右,空间会随着需求增长
M代表一个工作线程,在M上有一个P和G,P是绑定到M上的,G是通过P的调度获取的,在某一时刻,一个M上只有一个G(g0除外)在P上拥有一个G队列,里面是已经就绪的G,是可以被调度到线程栈上执行的协程,称为运行队列
全局队列:存放等待运行的G
P的本地队列:优先将新创建的G存入到P的本地队列,如果本地队列已满,则存入到全局队列
P列表:程序启动时创建,P的最大个数==GOMAXPROCS
M列表:当前OS分配到go程序的内核线程数
2.2. 调度器策略
- 复用线程
- work stealing机制:当本线程无可运行的G时,尝试从其他线程绑定的调度器中偷取协程,而不是销毁线程
- hand off机制:当本地线程由于G发生阻塞时,线程释放绑定的P,将P转给其他空闲的M线程来执行
- 并行:
GOMAXPROCS设置P的数量,最多有GOMAXPROCS个线程分布在多个CPU上同时运行 - 抢占 go中的协程最多只能占用CPU 10ms,防止其他协程处于饥饿状态
- 全局G队列 当M线程执行work stealing机制从其他调度器P中获取不到G时,可以从全局协程队列中获取
2.3. go指令的调度流程
- 通过
go func()创建一个goroutine - 有两个存储G的队列,一个是局部调度器P的本地协程队列,一个是全局协程队列。新创建的G保存在P的本地队列中,如果P的本地队列已满则保存在全局队列中
- G只能运行在M中,一个M必须持有一个P。M从本地协程队列中选取一个可执行的G来执行,如果本地队列为空则采用stealing机制从其他协程队列中获取一个G来执行
- 一个M调度G的执行过程其实是一个循环的过程
- 当M执行某一个G时发生syscall(系统调用)或者其他阻塞操作,M发生阻塞。如果当前一些G正在执行,runtime会将这个线程M从P中移除,然后创建一个新的内核线程M来执行G(如果有空闲的内核线程可进行复用)
- 当M系统调用结束时,此时G会尝试获取一个空闲的P执行,放入到P的本地队列中。如果获取不到调度器P,那么线程M则进行休眠,加入到空闲线程队列中,协程G则放入到全局协程队列中
2.4. go启动周期的M0和G0
M0
- 启动程序后编号为0的主线程
- 在全局变量
runtime.m0中,不需要在heap上分配 - 负责执行初始化操作和启动第一个协程G
- 启动第一个协程之后,M0与其他主线程相同
G0
- 每次启动一个M,第一个创建的goroutine即为G0,存放在全局空间
- G0仅仅用于调度,不指向任何可执行的函数
- 每个M都会绑定一个属于自己的G0
- 在syscall时会将M切换到G0,再调度
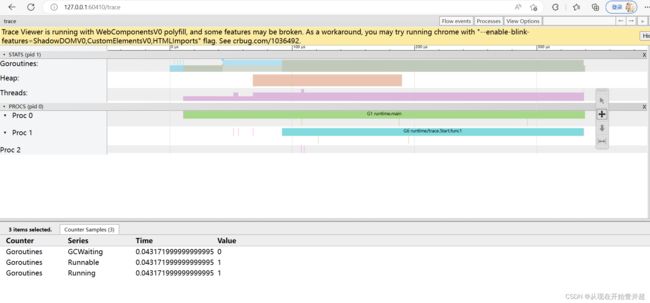
2.5. GMP可视化
- 创建trace文件
- 启动trace
- 执行业务代码
- 停止trace
go run运行后,得到trace.out文件- 通过
go tool trace trace文件名可视化查看GMP
func main() {
f, err := os.Create("trace.out")
if err != nil {
panic(err)
}
defer f.Close()
err = trace.Start(f)
if err != nil {
panic(err)
}
fmt.Println("业务逻辑...")
fmt.Printf("GMP Model Trace test")
trace.Stop()
}
2.6. GMP的几种调度场景
-
G1创建G2:P拥有G1,M获取P开始运行G1,G1使用
go func()创建了G2,为了局部性G2优先加入到G1所在的本地协程队列 -
G1执行完毕:当G1调用goexit()退出时,M切换到所绑定的协程为G0,由G0负责调度本地协程队列中的G2,交给M执行
-
G2执行过程中开辟过多的协程:如果G2运行时需要创建6个协程,本地队列只能存放四个G3-G6,在创建G7时需要将本地协程队列的前两个协程与G7协程同时放入到全局协程队列中,此时本地协程队列还有一半空间,可以直接创建G8协程
-
唤醒休眠队列的线程:在创建G时,运行的G会尝试唤醒其他空闲的调度器与内核线程组合进行绑定。假定G2唤醒了线程M2,M2绑定了P2,并且运行了G0,但P2的本地协程队列没有协程(空队列),此时M2为自旋线程
-
自旋线程M2从全局协程队列中批量获取n个G。其中,
GQ为全局协程队列的size,GOMAXPROCS为当前调度器个数。可以看作是从全局协程队列到本地协程队列的一种负载均衡策略n = min(len(GQ)/GOMAXPROCS+1, len(GQ/2)) -
如果全局协程队列为空,自旋线程M2会执行work stealing机制,从其他调度器P的本地队列中获取一半协程G到M2的本地队列
-
自旋线程个数 + 执行线程个数 ≤ GOMAXPROCS
3. channel
3.1. channel的基本使用
为什么需要channel?
1.主线程在等待所有goroutine全部完成的时间很难确定
2.通过全局变量加锁同步实现通讯,不利于多个协程对全局变量的读写操作
channel特点
通道用于在goroutines之间共享数据,保证同步交换。channel需要指定数据类型,数据在channel上传递:任何时刻只有一个goroutine可以访问数据项,保证线程同步。channel底层是一个队列,线程安全的,多个协程并发访问时不需要加锁;channel是有类型的,一个string的channel只能存放string类型
channel声明和使用
var intChan chan int
chanMap := make(chan map[string]string, 10)
var chan1 chan Person
var chan2 chan *Person
intChan <- 10 //写入数据到channel
num := <- intChan // 读取channel的数据
channel是引用类型,必须**初始化(make)**才能使用。channel不能进行扩容,在没有使用协程的情况下,如果channel数据已取完,再取则直接报错 dead lock error
channel的接收特性
- 读和写操作对元素值的处理必须是原子性的
- 对于同一个channel同时写和读,即使写入速度快于读取速度,依旧不会造成阻塞dead lock
channel关闭和遍历
- 使用内置函数close关闭channel,当channel关闭后不能再写数据只能读取
- for-range遍历时,如果出现channel没有关闭则出现dead lock
只写channel和只读channel
channel可以声明为只读或者只写,默认是可读可写的
var intchan chan <- int // 只写channel
var intchan <-chan int // 只读channel
3.2. 同步器
WaitGroup实现同步
由于主线程一旦执行完毕,无论goroutines是否执行完,整个程序都会结束。因此,需要一种同步机制来协调主线程和协程之间的执行顺序
WaitGroup类似于JUC中的CountDownLatch
WaitGroup.Done()表示已经完成了一个任务,等价于WaitGroup.Add(-1)WaitGroup.Add(1)表示增加一个任务到协程队列,计数器+1- 主线程中使用WaitGroup.Wait(),运行到这步会发生阻塞,直到WaitGroup中的计数器为0时才能继续向下执行
var wg sync.WaitGroup
func main(){
for i := 0; i < 10; i++ {
go show(i)
wg.Add(1)
}
wg.Wait() // 等价于countDownLatch.await();
fmt.Println("[main] continue...")
}
func task(i int) {
// defer wg.Add(-1)
defer wg.Done() // 等价于countDownLatch.countDown();
fmt.Printf("[goroutine] 当前i=%d\n", i)
}
runtime包
runtime.Gosched()让出CPU时间片,重新等待安排任务
func printMsg(msg string) {
for i := 0; i < 5; i++ {
fmt.Printf("[goroutine] msg: %v\n", msg)
}
}
func main(){
go printMsg("java is the best!")
// go printMsg("spring cloud is all you need!")
for i := 0; i < 5; i++ {
runtime.Gosched()
fmt.Println("[main] golang concurrent...")
}
fmt.Println("[main] continue...")
}
每次主线程运行到runtime.Gosched()时,将CPU时间片交出去,因此go printMsg任务会先执行,打印5次之后,主线程再打印5次。
runtime.Goexit()退出当前协程runtime.GOMAXPROCS默认使用本机的最大CPU核数sync.Mutex互斥锁
var (
FactorialMap = make(map[int]uint64, 16)
// 声明一个全局互斥锁
lock sync.Mutex
)
func main(){
// 向map中写入数据
for i := 1; i <= 20; i++ {
go factorial(i)
}
// 防止主线程执行完毕goroutine还没完成任务
time.Sleep(time.Second * 3)
// 防止主线程和协程对临界资源的读写并发
lock.Lock()
for i, v := range FactorialMap {
fmt.Printf("map[%d]=%d\n", i, v)
}
lock.Unlock()
}
func factorial(n int) {
var res uint64
res = 1
for i := 1; i <= n; i++ {
res *= uint64(i)
}
// 存在并发写问题 -> concurrent map writes
// 需要加入互斥锁
lock.Lock()
FactorialMap[n] = res
lock.Unlock()
}
select和switch
-
select用于处理异步IO操作,select可以监听case语句中channel的读写操作,当case中channel读写操作为非阻塞状态时(可读可写),触发相应的动作。解决从管道读取数据的阻塞问题,在遍历channel时如果不关闭则会发生阻塞导致deadlock
-
select中的case语句必须是一个channel操作,default语句总是可执行的
-
如果有多个case都可运行,select可随机选出一个执行
-
如果没有case可以执行,那么执行default逻辑
-
如果没有case可以执行且没有default语句,select将会阻塞,直到某个case可以执行
var (
intChan = make(chan int)
strChan = make(chan string)
)
func main(){
go func() {
intChan <- 100
strChan <- "golang"
defer close(intChan)
defer close(strChan)
}()
for {
select {
case r := <-intChan:
fmt.Printf("[int chan] r: %v\n", r)
case r := <-strChan:
fmt.Printf("[string chan] r: %v\n", r)
default:
fmt.Println("no channel can be read!")
}
}
fmt.Println("[main] continue...")
}
Timer
定时器,用于实现一些定时操作,内部也是通过channel实现的
func main(){
timer1 := time.NewTimer(time.Second * 2)
t1 := time.Now()
fmt.Printf("time1: %v\n", t1)
// timer1.C阻塞,直至2s结束继续执行
t2 := <-timer1.C
fmt.Printf("time2: %v\n", t2)
timer2 := time.NewTimer(time.Second * 2)
<-timer2.C
fmt.Println("2s 后...")
fmt.Printf("time3: %v\n", time.Now())
timer3 := time.NewTimer(time.Second)
go func() {
<-timer3.C
fmt.Println("timer3 blocked!")
}()
// 定时器停止,上面匿名函数中的<-timer3.C就不会阻塞了
stop := timer3.Stop()
if stop {
fmt.Println("timer3 stopped!")
}
}
Ticker
Timer只会执行一次,Ticker可以周期性的执行
func main(){
ticker := time.NewTicker(time.Second)
var sum int
intChan := make(chan int)
// 每隔1s向intChan中写入一个数,select语句从三个case分支随机选择一个执行
// 主线程一直在读取,直到sum>=10读取结束
go func() {
for _ = range ticker.C {
select {
case intChan <- 1:
fmt.Println("int channel写入1")
case intChan <- 2:
fmt.Println("int channel写入2")
case intChan <- 3:
fmt.Println("int channel写入3")
}
}
}()
for v := range intChan {
fmt.Println("从int channel中读取到: ", v)
sum += v
if sum >= 10 {
break
}
}
}
原子变量
类似于JUC中的AtomicInteger原子整型等,使用CAS机制进行同步。常见原子操作有
- 加减
atomic.AddInt32(&num, 1) - read
atomic.LoadInt32(&num) - CAS
atomic.CompareAndSwapInt32(&num, 100, 200)如果num==100修改为200否则此次CAS失败 - 交换
atomic.SwapInt32(&num, 200) - write
atomic.StoreInt32(&num, 200)
var num int32
func AtomicTest() {
for i := 0; i < 100; i++ {
go add()
go sub()
}
fmt.Printf("num: %v\n", num)
}
func add() {
atomic.AddInt32(&num, 1)
fmt.Printf("[add method] num: %v\n", num)
}
func sub() {
atomic.AddInt32(&num, -1)
fmt.Printf("[sub method] num: %v\n", num)
}