STM32之电动车报警项目实战
目录
一、433M无线发射接收模块介绍
二、项目设计
三、编写代码
1、初始化GPIO口引脚函数
2、编写中断服务函数
3、用外部中断共用入口函数,来调用外部中断处理回调函数
4、编写外部中断处理回调函数(在这里编写项目设计的逻辑)
5、把上述的外部中断处理回调函数,放入main主函数里
6、结果演示
一、433M无线发射接收模块介绍
单片机供电VCC GND接单片机
接收到信号,接收模块对应针脚输出高电平
有D0 D1 D2 D3,对应遥控器的ABCD
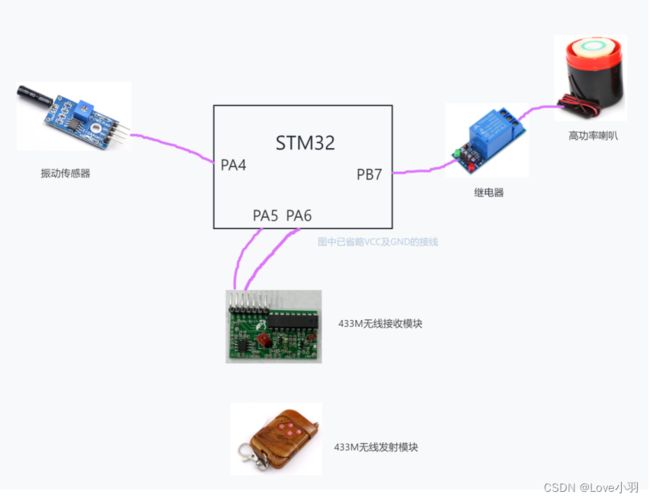
二、项目设计
//如果检测到PA4被拉低(小偷偷车),并且警报模式打开
//则将PB7拉低,继电器通电,喇叭一直响
// 如果检测到PA5被拉高(按键A按下),设定为开启警报模式
// 则将PB7拉低(喇叭响),2秒后恢复电平(喇叭不响),表示进入警报模式
// 同时将标志位设置为ON
// 如果检测到PA6被拉高(按键B按下),设定为关闭警报模式
// 则将PB7拉低(喇叭响),1秒后恢复电平(喇叭不响),表示关闭警报模式
// 同时将标志位设置为OFF
温馨提示:由于我没有喇叭,所以下面的实验由LED灯来代替喇叭
三、编写代码
1、初始化GPIO口引脚函数
void MX_GPIO_Init(void) //初始化GPIO口引脚函数
{
GPIO_InitTypeDef GPIO_InitStruct = {0}; //初始花设置GPIO的结构体
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOD_CLK_ENABLE(); //使能GPIOD时钟
__HAL_RCC_GPIOA_CLK_ENABLE(); //使能GPIOA时钟
__HAL_RCC_GPIOB_CLK_ENABLE(); //使能GPIOB时钟
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_SET); //GPIO B8引脚输出1的函数
/*Configure GPIO pin : PA4 */
GPIO_InitStruct.Pin = GPIO_PIN_4; //配置GPIO口引脚:PA4
GPIO_InitStruct.Mode = GPIO_MODE_IT_FALLING; //下降沿触发检测的外部中断模式
GPIO_InitStruct.Pull = GPIO_NOPULL; //内部电阻既不拉高也不拉低
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct); //根据上述内容,初始化GPIOA引脚
/*Configure GPIO pins : PA5 PA6 */
GPIO_InitStruct.Pin = GPIO_PIN_5|GPIO_PIN_6; //配置GPIO口引脚:PA5 PA6
GPIO_InitStruct.Mode = GPIO_MODE_IT_RISING; //上升沿触发检测的外部中断模式
GPIO_InitStruct.Pull = GPIO_NOPULL; //内部电阻既不拉高也不拉低
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct); //根据上述内容,初始化GPIOA引脚
/*Configure GPIO pin : PB8 */
GPIO_InitStruct.Pin = GPIO_PIN_8; //配置GPIO口引脚:PB8
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; //推挽输出:推挽输出可以真正的输出高电平
GPIO_InitStruct.Pull = GPIO_NOPULL; //内部电阻既不拉高也不拉低
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW; //GPIO引脚输出的频率
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct); //根据上述内容,初始化GPIOA引脚
/* EXTI interrupt init*/
HAL_NVIC_SetPriority(EXTI4_IRQn, 2, 0); //配置EXTI4_IRQn中断,抢先优先级2,响应优先级0
HAL_NVIC_EnableIRQ(EXTI4_IRQn); //使能中断EXTI4_IRQn
HAL_NVIC_SetPriority(EXTI9_5_IRQn, 2, 0); //配置EXTI9_5_IRQn中断,抢先优先级2,响应优先级0
HAL_NVIC_EnableIRQ(EXTI9_5_IRQn); 使能中断EXTI9_5_IRQn
}2、编写中断服务函数
#include "main.h"
#include "stm32f1xx_it.h"
void EXTI9_5_IRQHandler(void) //中断服务函数
{
HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_5); //调用中断处理公用函数,根据输入的参数,来判断到底输入的是哪个按键
HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_6); //调用中断处理公用函数,根据输入的参数,来判断到底输入的是哪个按键
}3、用外部中断共用入口函数,来调用外部中断处理回调函数
外部中断共用入口函数:void HAL_GPIO_EXTI_IRQHandler(uint16_t GPIO_Pin)
void HAL_GPIO_EXTI_IRQHandler(uint16_t GPIO_Pin)
{
/* EXTI line interrupt detected */
if (__HAL_GPIO_EXTI_GET_IT(GPIO_Pin) != 0x00u) //判断是否产生中断
{
__HAL_GPIO_EXTI_CLEAR_IT(GPIO_Pin); //清除中断标志位
HAL_GPIO_EXTI_Callback(GPIO_Pin); //调用外部中断处理回调函数
}
}4、编写外部中断处理回调函数(在这里编写项目设计的逻辑)
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
static int mark = J_OFF;
switch(GPIO_Pin)
{
case GPIO_PIN_4:
//如果检测到PA4被拉低(小偷偷车),并且警报模式打开
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_4) == GPIO_PIN_RESET&& mark == J_ON)
{
//则将PB8拉低,继电器通电,LED1灯一直亮
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_8,GPIO_PIN_RESET);
}
break;
//如果检测到PA5被拉高(按键A按下),设定为开启警报模式
case GPIO_PIN_5:
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_5) == GPIO_PIN_SET)
{
//则将PB8拉低(LED1灯亮),2秒后恢复电平(LED1不灯亮),表示进入警报模式
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_8,GPIO_PIN_RESET);
HAL_Delay(2000);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8,GPIO_PIN_SET);
//同时将标志位设置为ON
mark = J_ON;
}
break;
// 如果检测到PA6被拉高(按键B被按下),设定为解除警报模式
case GPIO_PIN_6:
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_6) == GPIO_PIN_SET)
{
// 则将PB8拉低(LED1不灯亮),表示关闭警报模式
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_8,GPIO_PIN_SET);
//同时将标志位设置为OFF
mark = J_OFF;
}
break;
}
}5、把上述的外部中断处理回调函数,放入main主函数里
#include "main.h"
#include "gpio.h"
#define J_ON 0
#define J_OFF 1
void SystemClock_Config(void);
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
static int mark = J_OFF;
switch(GPIO_Pin)
{
case GPIO_PIN_4:
//如果检测到PA4被拉低(小偷偷车),并且警报模式打开
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_4) == GPIO_PIN_RESET&& mark == J_ON)
{
//则将PB8拉低,继电器通电,LED1灯一直亮
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_8,GPIO_PIN_RESET);
}
break;
//如果检测到PA5被拉高(按键A按下),设定为开启警报模式
case GPIO_PIN_5:
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_5) == GPIO_PIN_SET)
{
//则将PB8拉低(LED1灯亮),2秒后恢复电平(LED1不灯亮),表示进入警报模式
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_8,GPIO_PIN_RESET);
HAL_Delay(2000);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8,GPIO_PIN_SET);
//同时将标志位设置为ON
mark = J_ON;
}
break;
// 如果检测到PA6被拉高(按键B被按下),设定为解除警报模式
case GPIO_PIN_6:
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_6) == GPIO_PIN_SET)
{
// 则将PB8拉低(LED1不灯亮),表示关闭警报模式
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_8,GPIO_PIN_SET);
//同时将标志位设置为OFF
mark = J_OFF;
}
break;
}
}
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
HAL_NVIC_SetPriority(SysTick_IRQn,0,0);
}
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}6、结果演示
按下A键,启动报警模式,LED1灯亮一秒后灭,摇晃震动传感器,LED1灯亮,并且一直亮,按下B键,关闭报警模式,LED1灯灭。