0. 简介
上一篇博客简单介绍了GMP模型,这一篇我们介绍一下Go调度器的初始化过程,也就是在main.main函数运行之前所做的事情。
1. 一些全局变量
在proc.go和runtime.go中有一些很重要的全局的变量,我们将其先列出来:
var ( m0 m // 代表第一个起来的线程,即主线程 g0 g // m0的g0,即 m0.g0 = &g0 allgs []*g // 保存所有的g allglen uintptr // 所有g的长度 allm *m // 保存所有的m gomaxprocs int32 // p的最大个数,默认等于 ncpu ncpu int32 // 程序启动时,会调用osinit函数获得此值 sched schedt // 调度器的结构体对象,全局仅此一份 )
程序初始化时,这些全局变量最开始都会被初始化为空值,然后随着一些初始化函数的作用,这些变量才会开始被赋值。
2. main函数之前
package main
import "fmt"
func main() {
fmt.Println("hello world")
}
在项目根目录下执行go build -gcflags "-N -l" -o main main.go,-gcflags "-N -l"是为了关闭编译器的优化和函数内联。然后我们使用gdb调试代码:
$ gdb main
GNU gdb (Ubuntu 8.1.1-0ubuntu1) 8.1.1
...
(gdb) info files
Symbols from "/home/chenyiguo/smb_share/go_routine_test/main".
Local exec file:
`/home/chenyiguo/smb_share/go_routine_test/main', file type elf64-x86-64.
Entry point: 0x45c220
0x0000000000401000 - 0x000000000047e357 is .text
0x000000000047f000 - 0x00000000004b3ecc is .rodata
0x00000000004b4060 - 0x00000000004b4538 is .typelink
0x00000000004b4540 - 0x00000000004b4598 is .itablink
0x00000000004b4598 - 0x00000000004b4598 is .gosymtab
0x00000000004b45a0 - 0x000000000050ce10 is .gopclntab
0x000000000050d000 - 0x000000000050d020 is .go.buildinfo
0x000000000050d020 - 0x000000000051d600 is .noptrdata
0x000000000051d600 - 0x0000000000524e10 is .data
0x0000000000524e20 - 0x0000000000553d28 is .bss
0x0000000000553d40 - 0x00000000005590a0 is .noptrbss
0x0000000000400f9c - 0x0000000000401000 is .note.go.buildid
可以看到,程序入口地址是0x45c220,继续打断点b *0x45c220进入,可以看到,程序代码的入口就在/usr/local/go/src/runtime/rt0_linux_amd64.s的第8行。
(gdb) b *0x45c220
Breakpoint 1 at 0x45c220: file /usr/local/go/src/runtime/rt0_linux_amd64.s, line 8.
进入代码位置,可以看到,其第8行是调到_rt0_amd64(SB)函数运行。
TEXT _rt0_amd64_linux(SB),NOSPLIT,$-8
JMP _rt0_amd64(SB)
再全局搜索_rt0_amd64,可以发现,在asm_amd64.s中有如下代码,最终会执行到runtime·rt0_go(SB)代码,在asm_amd64.s中,我们可以找到runtime·rt0_go代码的实现,这也是汇编语言。
TEXT _rt0_amd64(SB),NOSPLIT,$-8
MOVQ 0(SP), DI // argc
LEAQ 8(SP), SI // argv
JMP runtime·rt0_go(SB)
而rt0_go函数会完成Go程序启动的所有初始化工作,这个函数比较长,也比较复杂,我们可以分段来看:
TEXT runtime·rt0_go(SB),NOSPLIT|TOPFRAME,$0
// copy arguments forward on an even stack
MOVQ DI, AX // argc
MOVQ SI, BX // argv
SUBQ $(5*8), SP // 3args 2auto
ANDQ $~15, SP
MOVQ AX, 24(SP)
MOVQ BX, 32(SP)
以上一段我们不用深究,第四条指令调整栈(内核主线程栈)顶指针16字节对齐,然后存储了argc和argv数组地址。
2.1 初始化g0
注意,此处提及的g0是全局变量g0,即主线程m0的m0.g0。
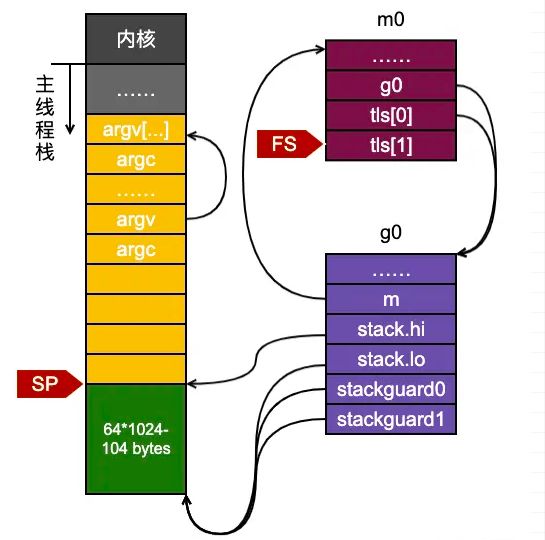
// create istack out of the given (operating system) stack. // _cgo_init may update stackguard. MOVQ $runtime·g0(SB), DI // g0的地址存放在DI寄存器 LEAQ (-64*1024+104)(SP), BX // BX=SP-64*1024+104 MOVQ BX, g_stackguard0(DI) // g0.stackguard0=SP-64*1024+104 MOVQ BX, g_stackguard1(DI) // g0.stackguard1=SP-64*1024+104 MOVQ BX, (g_stack+stack_lo)(DI) // g0.stack.lo=SP-64*1024+104 MOVQ SP, (g_stack+stack_hi)(DI) // g0.stack.hi=SP
从以上代码可以看出,系统为主线程m0的g0在系统线程的栈空间开辟了一个大约有64KB大小的栈,地址范围是SP-64*1024+104 ~ SP。完成以上指令后,系统栈与g0的关系大致如图所示:

2.2 主线程与m0的绑定
LEAQ runtime·m0+m_tls(SB), DI // DI=&m0.tls
CALL runtime·settls(SB) // 调用settls函数设置本地线程存储
// store through it, to make sure it works
get_tls(BX)
MOVQ $0x123, g(BX)
MOVQ runtime·m0+m_tls(SB), AX
CMPQ AX, $0x123
JEQ 2(PC)
CALL runtime·abort(SB)
前面两段代码,前两条指令通过runtime·settls来设置本地线程存储,后面一段是验证设置是否成功。下面我们看下runtime·settls到底做了什么。
// set tls base to DI
TEXT runtime·settls(SB),NOSPLIT,$32
#ifdef GOOS_android
// Android stores the TLS offset in runtime·tls_g.
SUBQ runtime·tls_g(SB), DI // 不会走到这里,这是Android系统的
#else
ADDQ $8, DI // ELF wants to use -8(FS) // 这之后,DI存放的就是m0.tls[1]的地址了
#endif
MOVQ DI, SI // 将DI值赋给SI,即m0.tls[1]的地址,作为系统调用的第二个参数
MOVQ $0x1002, DI // ARCH_SET_FS // DI是第一个参数,0x1002表示操作ARCH_SET_FS,这是个int类型的code,表示设置FS段寄存器为SI寄存器的值,即m0.tls[1]
MOVQ $SYS_arch_prctl, AX // 接下来就是系统调用了
SYSCALL
CMPQ AX, $0xfffffffffffff001
JLS 2(PC)
MOVL $0xf1, 0xf1 // crash
RET
上面代码表明,通过arch_prctl的系统调用,将FS段寄存器的值设置为了m0.tls[1]的地址。操作系统在把线程调离CPU运行时会帮我们把所有寄存器中的值保存在内存中,调度线程起来运行时又会从内存中把这些寄存器的值恢复到CPU,这样,在此之后,工作线程代码就可以通过FS寄存器来找到m.tls。从而,就实现了主线程与m0之间的绑定。
为了读懂以上代码,我们需要知道的是,get_tls和g是宏实现,在runtime/go_tls.h中,如下。所以我们知道,get_tls(r)会将m0.tls的地址赋给r;而看了后面的操作,你就会明白,g(r)则会取出对应的g地址。
#ifdef GOARCH_amd64 #define get_tls(r) MOVQ TLS, r #define g(r) 0(r)(TLS*1) #endif
2.3 m0和g0的绑定
ok:
// set the per-goroutine and per-mach "registers"
get_tls(BX)
LEAQ runtime·g0(SB), CX // CX=&g0
MOVQ CX, g(BX) // m0.tls[0]=&g0
LEAQ runtime·m0(SB), AX // AX=&m0
// save m->g0 = g0
MOVQ CX, m_g0(AX) // m0.g0=&g0
// save m0 to g0->m
MOVQ AX, g_m(CX) // g0.m = m0
就这样,将g0和m0进行了深刻地绑定
2.4 调度器的初始化
在接下来的代码中又是一些需求项的检查,我们直接忽略,看以下代码:
MOVL 24(SP), AX // copy argc // AX=argc
MOVL AX, 0(SP) // argc放到栈顶
MOVQ 32(SP), AX // copy argv // AX=argv
MOVQ AX, 8(SP) // argv放到SP+8的位置
CALL runtime·args(SB) // 处理操作系统传过来的参数和env,无需关心
CALL runtime·osinit(SB) // linux系统的osinit没有做很多事,只是赋值了ncpu和物理页大小
CALL runtime·schedinit(SB) // 调度器的初始化
调度器的初始化是在runtime.schedinit函数中完成的,是用go代码写的。
// The bootstrap sequence is:
//
// call osinit
// call schedinit
// make & queue new G
// call runtime·mstart
//
// The new G calls runtime·main.
func schedinit() {
// a lot of lock init
...
// raceinit must be the first call to race detector.
// In particular, it must be done before mallocinit below calls racemapshadow.
// getg函数源码没有定义,在编译的时候由编译器插入,类似下面的代码
// get_tls(CX)
// MOVQ g(CX), BX
_g_ := getg() // 获取的 _g_ = &g0
if raceenabled {
_g_.racectx, raceprocctx0 = raceinit()
}
sched.maxmcount = 10000 // 操作系统线程个数最多为10000
// a lot of init
...
// 初始化m0
mcommoninit(_g_.m, -1)
// 一些其他设置,暂时忽略
...
sched.lastpoll = uint64(nanotime())
// p的数目确定
procs := ncpu
if n, ok := atoi32(gogetenv("GOMAXPROCS")); ok && n > 0 {
procs = n
}
// 初始化p
if procresize(procs) != nil {
throw("unknown runnable goroutine during bootstrap")
}
...
}
从上面我们可以看出,虽然在汇编代码中将m0与g0进行了一些数据的绑定,但是并没有真正初始化m0。所以在schedinit函数中,我们有两个重要的工作要做:
- 通过函数
mcommoninit初始化m0; - 通过函数
procresize初始化p,初始化出来的p的数目一般而言是系统的CPU核数(ncpu),除非用户设置了GOMAXPROCS。
2.4.1 初始化m0
// Pre-allocated ID may be passed as 'id', or omitted by passing -1.
func mcommoninit(mp *m, id int64) {
_g_ := getg() // _g_ = &g0
// g0 stack won't make sense for user (and is not necessary unwindable).
if _g_ != _g_.m.g0 {
callers(1, mp.createstack[:])
}
lock(&sched.lock)
if id >= 0 {
mp.id = id
} else {
mp.id = mReserveID() // 初次从mReserveID()获取到的id=0
}
// random初始化,用于窃取 G
lo := uint32(int64Hash(uint64(mp.id), fastrandseed))
hi := uint32(int64Hash(uint64(cputicks()), ^fastrandseed))
if lo|hi == 0 {
hi = 1
}
// Same behavior as for 1.17.
// TODO: Simplify ths.
if goarch.BigEndian {
mp.fastrand = uint64(lo)<<32 | uint64(hi)
} else {
mp.fastrand = uint64(hi)<<32 | uint64(lo)
}
// 创建用于信号处理的gsignal,只是简单的从堆上分配一个g结构体对象,然后把栈设置好就返回了
mpreinit(mp)
if mp.gsignal != nil {
mp.gsignal.stackguard1 = mp.gsignal.stack.lo + _StackGuard
}
// 把m0挂入全局链表allm中
// Add to allm so garbage collector doesn't free g->m
// when it is just in a register or thread-local storage.
mp.alllink = allm
// NumCgoCall() iterates over allm w/o schedlock,
// so we need to publish it safely.
atomicstorep(unsafe.Pointer(&allm), unsafe.Pointer(mp))
unlock(&sched.lock)
// Allocate memory to hold a cgo traceback if the cgo call crashes.
if iscgo || GOOS == "solaris" || GOOS == "illumos" || GOOS == "windows" {
mp.cgoCallers = new(cgoCallers)
}
}
从函数可以看出,这里并未对传入的m做有关调度的初始化,可以简单认为这个函数只是把m0放到了全局链表allm中后就返回了。
2.4.2 初始化allp
func procresize(nprocs int32) *p {
...
old := gomaxprocs // 系统初始化的时候, gomaxprocs=0
if old < 0 || nprocs <= 0 {
throw("procresize: invalid arg")
}
...
// 看看是否需要扩大allp,初始化时len(allp)=0,所以肯定会增长
// Grow allp if necessary.
if nprocs > int32(len(allp)) {
// Synchronize with retake, which could be running
// concurrently since it doesn't run on a P.
lock(&allpLock)
if nprocs <= int32(cap(allp)) {
allp = allp[:nprocs]
} else {
nallp := make([]*p, nprocs)
// Copy everything up to allp's cap so we
// never lose old allocated Ps.
copy(nallp, allp[:cap(allp)])
allp = nallp
}
if maskWords <= int32(cap(idlepMask)) {
idlepMask = idlepMask[:maskWords]
timerpMask = timerpMask[:maskWords]
} else {
nidlepMask := make([]uint32, maskWords)
// No need to copy beyond len, old Ps are irrelevant.
copy(nidlepMask, idlepMask)
idlepMask = nidlepMask
ntimerpMask := make([]uint32, maskWords)
copy(ntimerpMask, timerpMask)
timerpMask = ntimerpMask
}
unlock(&allpLock)
}
// 初始化这些P
// initialize new P's
for i := old; i < nprocs; i++ {
pp := allp[i]
if pp == nil {
pp = new(p)
}
pp.init(i)
atomicstorep(unsafe.Pointer(&allp[i]), unsafe.Pointer(pp))
}
_g_ := getg() // _g_ = g0
if _g_.m.p != 0 && _g_.m.p.ptr().id < nprocs { // 初始化时m0.p=0,所以不会进这个分支
// continue to use the current P
_g_.m.p.ptr().status = _Prunning
_g_.m.p.ptr().mcache.prepareForSweep()
} else {
// release the current P and acquire allp[0].
//
// We must do this before destroying our current P
// because p.destroy itself has write barriers, so we
// need to do that from a valid P.
if _g_.m.p != 0 {
if trace.enabled {
// Pretend that we were descheduled
// and then scheduled again to keep
// the trace sane.
traceGoSched()
traceProcStop(_g_.m.p.ptr())
}
_g_.m.p.ptr().m = 0
}
_g_.m.p = 0
p := allp[0]
p.m = 0
p.status = _Pidle
acquirep(p) // 把p和m0关联起来
if trace.enabled {
traceGoStart()
}
}
// g.m.p is now set, so we no longer need mcache0 for bootstrapping.
mcache0 = nil
// release resources from unused P's
for i := nprocs; i < old; i++ {
p := allp[i]
p.destroy()
// can't free P itself because it can be referenced by an M in syscall
}
// Trim allp.
if int32(len(allp)) != nprocs {
lock(&allpLock)
allp = allp[:nprocs]
idlepMask = idlepMask[:maskWords]
timerpMask = timerpMask[:maskWords]
unlock(&allpLock)
}
// 将所有的空闲的p放入空闲链表
var runnablePs *p
for i := nprocs - 1; i >= 0; i-- {
p := allp[i]
if _g_.m.p.ptr() == p {
continue
}
p.status = _Pidle
if runqempty(p) {
pidleput(p)
} else {
p.m.set(mget())
p.link.set(runnablePs)
runnablePs = p
}
}
stealOrder.reset(uint32(nprocs))
var int32p *int32 = &gomaxprocs // make compiler check that gomaxprocs is an int32
atomic.Store((*uint32)(unsafe.Pointer(int32p)), uint32(nprocs))
return runnablePs
}
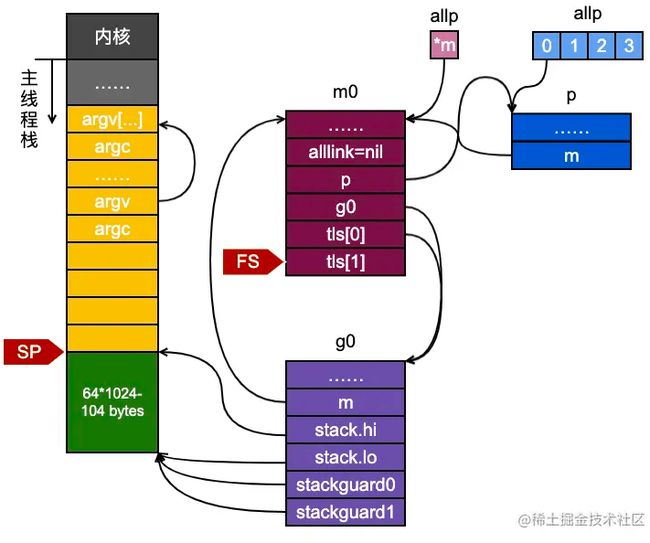
其实,以上代码可以总结如下:
- 使用
make([]*p, nprocs)初始化全局变量allp,即allp = make([]*p, nprocs) - 循环创建并初始化nprocs个p结构体对象并依次保存在
allp切片之中 - 把
m0和allp[0]绑定在一起,即m0.p = allp[0],allp[0].m = m0 - 把除了
allp[0]之外的所有p放入到全局变量sched的pidle空闲队列之中
至此,整个调度器中各组件之间的关系如下图所示:
到此这篇关于Golang并发编程之调度器初始化详解的文章就介绍到这了,更多相关Golang调度器初始化内容请搜索脚本之家以前的文章或继续浏览下面的相关文章希望大家以后多多支持脚本之家!