强度信息SLAM调研
强度信息SLAM调研
强度可应用场景:
强度信息转强度图像:
2023 arxiv《Real-Time Simultaneous Localization and Mapping with LiDAR intensity》
目标应用场景是激光应用不佳而视觉有良好表现的场景,解决长廊等几何退化问题
具体是通过对强度图像提取orb特征点再2D转3D投影优化获取位姿。
代码参考:https://zhuanlan.zhihu.com/p/527529896
实验部分测试了几何退化场景:室内环境中,有长走廊和狭窄的通道,在山区环境中,我们有陡峭的坡和狭窄的通道,在街道环境中,有许多障碍和许多转弯,这些情况对于纯激光雷达SLAM来说都很困难。
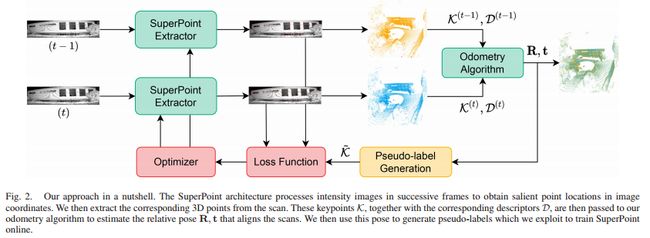
2022 RA-L《Fast Sparse LiDAR Odometry Using Self-Supervised Feature Selection on Intensity Images》
使用强度信息转强度图,对强度图进行超级点提取,利用稀疏的特征点进行里程计估计。
2021 IROS 《Visual Place Recognition using LiDAR Intensity Information》https://zhuanlan.zhihu.com/p/554276347
该论文测试了点云强度值转为强度图像后,视觉特征点提取的效果与利用强度图像进行重定位的可行性。
2022 TIM《An Intensity-Augmented LiDAR-Inertial SLAM for Solid-State LiDARs in Degenerated Environments》
不进行转化,直接进行强度特征提取:不仅可以提取几何平面点和边缘点,还可以使用激光雷达测量返回的强度(反射率)提取强度边缘点。类似Intensity SLAM
之前失败的原因,Kiiti数据集强度值转强度图像质量过低
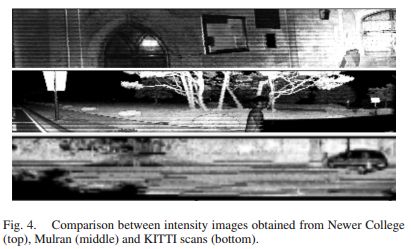
我们无法对流行的KITTI Odometry序列[12]进行比较,因为录音中使用的激光雷达的强度值由于激光雷达的十多年旧模型而太多噪音值了。早期的多束激光雷达传感器返回不同的强度值,即使光束照射在同一个表面[17]。在这样的噪声图像上提取的描述符不够可靠,无法进行高质量的特征匹配。为了更好地展示这种效果,我们在图4中报告了通过投影KITTI、MulRan和Newer College数据集的样本扫描获得的强度图像。
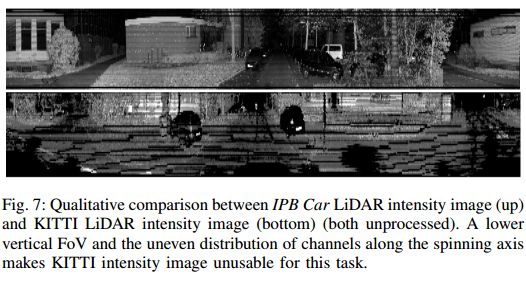
IPB数据集和KITTI数据集的对比
较低的垂直 FoV 和沿旋转轴的通道分布不均匀使得 KITTI 强度图像无法用于此任务。
原因:用来记录这一数据的HDL64E具有不规则分布的垂直激光。这很可能是因为在点云创建过程中(从原始球面LiDAR测量到笛卡尔坐标)没有考虑校准偏移。这与降低的垂直FOV(26.9°)一起导致了两个主要问题:
- 圆柱形图像中不同垂直位置的视点不变性的弱点。相同的项目可能看起来不同,取决于激光雷达的方向。
- 由于强度的急剧变化,许多假阳性特征将被检测到靠近空间隙(黑色水平线)。
配准:
分割地面点
可用于动态识别(ERASOR)或算法轻量化(Lego-LOAM)轻量化是通过将点云稀疏实现的。
也可应用于自动停车,电动汽车自动导航至充电桩。
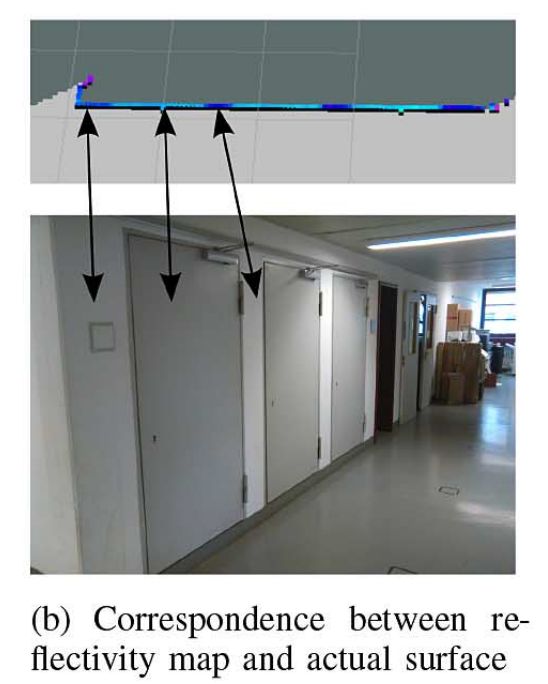
室内识别墙壁,仅用墙壁进行定位。
速度过快,或转角导致的运动模糊,距离配准不如强度配准
比如机器人自转,根据激光雷达scan中的几何信息完全不能判断机器人是否进行了旋转。
自身高速运动连续两帧中实际匹配点较小,而误匹配点占主要部分时,
强度信息只能作为辅助,由于场景中可能出现同种反射率的两个物体,因此以几何距离为初步搜索范围,进一步以强度信息匹配。
几何退化场景
停车场,长廊,隧道,在地下环境中感知、工业检查和搜救。
长廊,隧道:边角点特征不易提取。
存在遮挡物(例如雾、灰尘、烟雾)导致距离信息不准,可以根据强度信息排除误匹配点。
目前的解决方案:多传感器融合,视觉+惯导+激光解决
利用强度信息转化成强度图像类似《Real-Time Simultaneous Localization and Mapping with LiDAR intensity》
在地下环境中感知、工业检查和搜救,存在遮挡物(例如雾、灰尘、烟雾)
距离信息不准,可以根据强度信息排除误匹配点。
利用强度信息计算位姿
类似ORB中单目初始化过程中单应性矩阵和基础矩阵求位姿,同时进行强度配准和距离配准,通过得分选择最终的配准。
动态场景
几何距离不稳定的情况:动态场景,运动点前一帧的位置根据位姿在当前帧中进行搜索时误匹配到其他点,此时可以根据强度信息做最终判别。
根据点云强度信息计算场景流,目前点云场景流的计算和使用仍未有良好的解决方案。
利用点云进行场景流追踪基本都是基于几何特征的。Flownet3D,Flownet3D++,rigidFlow.等场景流计算论文
深度学习算法利用强度信息的目前都是位姿估计,引入强度值作为几何特征的补充特征。
强度信息场景流计算:
求强度对x、y、z方向的导数,类似光流
3D光流计算:
前一帧的点*导数=后一帧中强度值不变的点。
代价函数为前后两帧中的点的强度差值,利用强度对每个点的导数进行优化,
OpticalFlow(光流)=SceneFlow(场景流)+EgoFlow(相机自运动)
通过点的3D位移得到3D光流,再减去自运动流就得到了场景流。
ICRA2021 《ERASOR: Egocentric RAtio of pSeudo Occupancy-based dynamic object Removal for Static 3D Point Cloud Map Building》
区分地面点和其他点
考虑距离原点 80 米半径范围内 、-1米到+3米高度区间内的空间,这个空间是我们的感兴趣区域 —— Volume of Interest, VOI。
接下来,将 VOI 按照角度和半径划分为一个个栅格(环形区域 bin),对每个格子内的点云计算 z 向的高度差,这个高度差,描述了该 bin 内的点云分布信息,我们称之为 Region-wise Pseudo Occupancy Descriptor —— R-POD
查询帧和子地图中对应bin的高度差如果大于一定值,则认定为潜在动态区域。
所有的动态物体都是位于地面上的,所以潜在动态 bin 中的点,如果不属于地面,就属于动态物体。每个 bin 内的地面拟合是独立进行的,并不会参考其它 bin 中
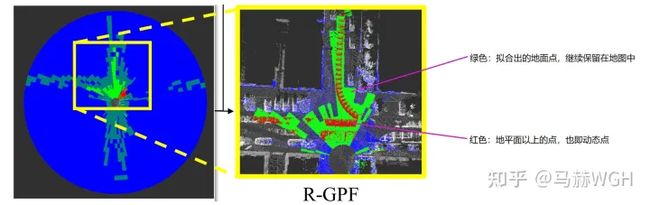
地面点拟合
拟合地平面的具体方法是先选出高度最低的若干个点作为种子点,向上进行3次区域生长,找出的点为地面点。然后,用主成分分析法(Principal Component Analysis, PCA)计算地面点云的特征值和特征向量,则特征值最小的那个特征向量,最有可能是地面的法向量,据此算出地平面的平面方程。这个地面提取方法称为 Region-wise Ground Plane Fitting, R-GPF。最后将地平面以上的点作为动态点移除,结果如下图所示。
强度信息矫正
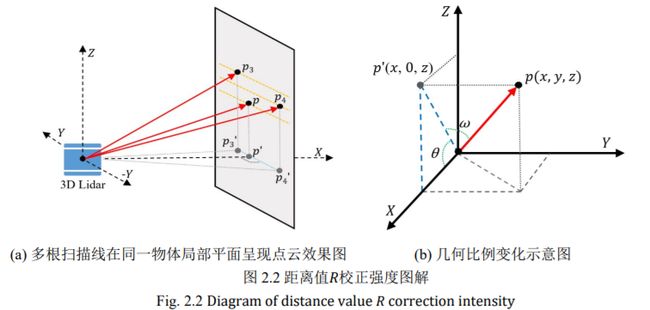
强度值测量公式:
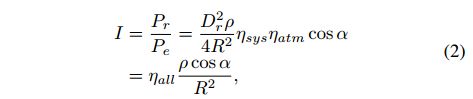
α为物体表面与激光束之间的入射角,ρ为物体的材料反射率。其中,距离测量R和入射角α为外部参数,随着入射角变大而减小,也随着距离的增大而减小。 对于入射角的影响,我们通过估计物体局部平面法向量的方法确定入射角,具体 原理如图 2.1 所示。
对于激光雷达扫描,距离可以很容易地测量。因此,可以通过分析局部法线来估计入射角。对于每一点p∈R3,我们可以搜索最近的两点p1和p2,使得局部表面法向量n可以Loop表示为:

其中×是叉乘。入射角是

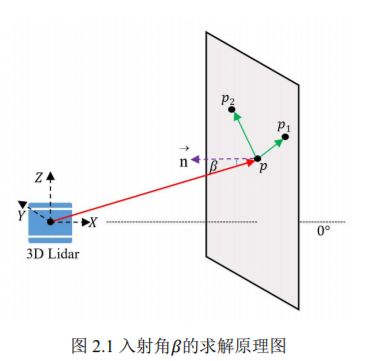
与此同时,由于三维激光雷达是多线结构,在进行扫描过程中,多跟扫描线会落 在同一物体上。在三维空间坐标系中,测量距离本身是目标物体位置和传感器姿态的 函数,而且是很容易测量的。对于同一物体某一局部平面上,多跟扫描线上的点云与传感器发射原点的距离是不同的,因此对强度值的测定有一定影响。为了使同一物体 局部平面的强度值规范化,我们采用两步几何比例变换方法,将点云强度值校正到轴 正方向,以便于后期点云强度特征提取与搜索匹配。
对于被测物体某一局部平面的某一个扫描线上的点云(, , ),将其投影到平 面,得到的投影点为’(, 0, ),那么对于三维空间中的几何比例变换为:
校正后的三维激光点云强度值为:
由此,我们通过被测距离与入射角两方面将三维激光点云强度值校正到轴正方向, 使得某一物体某一相同材质的局部平面上的点云强度值能够规范化且趋于一致。
此外, 低强度值通常会导致较低的信噪比(SNR),这也会降低强度值测量的测距精度[66],因 此我们在算法中消除距离雷达较远的点,以免低强度值的点云干扰了系统整体的精度。