【我是土堆 - Pytorch教程】 知识点 学习总结笔记(四)
此文章为【我是土堆 - Pytorch教程】 知识点 学习总结笔记(四)包括:神经网络 - 非线性激活 、神经网络 - 线性层及其他层介绍 、神经网络 - 搭建小实战和 Sequential 的使用、损失函数与反向传播、优化器、现有网络模型的使用及修改、网络模型的保存与读取。
学习系列笔记:
【我是土堆 - Pytorch教程】 知识点 学习总结笔记(一)_耿鬼喝椰汁的博客-CSDN博客
【我是土堆 - Pytorch教程】 知识点 学习总结笔记(二)_耿鬼喝椰汁的博客-CSDN博客
【我是土堆 - Pytorch教程】 知识点 学习总结笔记(三)_耿鬼喝椰汁的博客-CSDN博客
目录
一、神经网络 - 非线性激活
1.最常见的非线性激活:RELU
代码举例:RELU
2.Sigmoid
代码举例:Sigmoid(数据集CIFAR10)
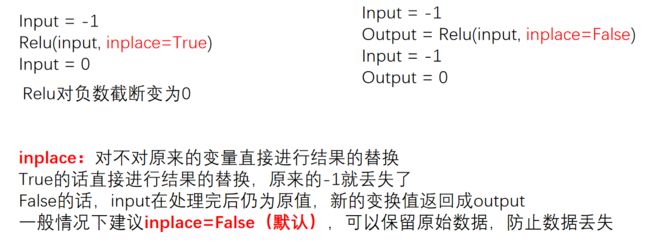
关于inplace
二.神经网络 - 线性层及其他层介绍
1.批标准化层--归一化层(不难,自学看官方文档)
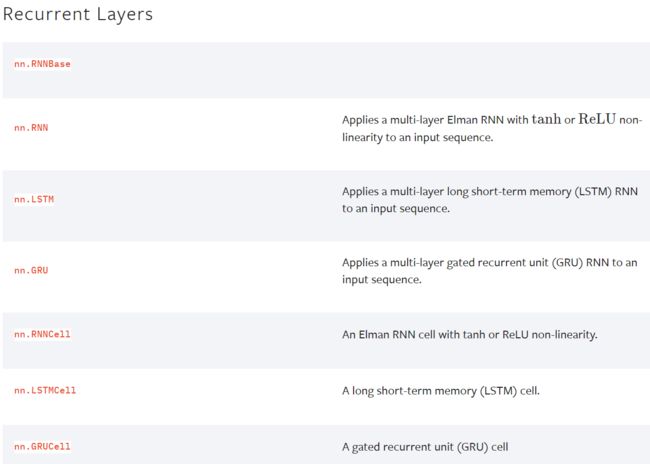
2.Recurrent Layers(特定网络中使用,自学)
3.Transformer Layers(特定网络中使用,自学)
4.Linear Layers--线性层(本节讲解)--使用较多
编辑 5.代码实例 vgg16 model
flatten 摊平
6.Dropout Layers(不难,自学)
7.Sparse Layers(特定网络中使用,自学)
Embedding
8.Distance Functions
9. Loss Functions
10. pytorch提供的一些网络模型
三、神经网络 - 搭建小实战和 Sequential 的使用
1.对 CIFAR10 进行分类的简单神经网络
直接搭建,实现上图 CIFAR10 model 的代码
实际过程中如何检查网络的正确性?
若不知道flatten之后的维度是多少该怎么办?
用 Sequential 搭建,实现上图 CIFAR10 model 的代码
2.引入 tensorboard 可视化模型结构
四、损失函数与反向传播
1. L1LOSS
代码
求和的方式:
2.MSELOSS(均方误差)
代码:
3. CROSSENTROPYLOSS(交叉熵)
代码:
3.如何在之前写的神经网络中用到 Loss Function(损失函数)
5. backward 反向传播
五、优化器
1.如何使用优化器?
(1)构造
(2)调用优化器的step方法
算法
SGD为例
完整代码
六、现有网络模型的使用及修改
1.数据集 ImageNet
参数及下载
2.VGG16 模型
(1)参数
(2)vgg16 网络架构
3.如何利用现有网络去改动它的结构?
(1)添加
(2)修改
七、网络模型的保存与读取
1.两种方式保存模型
2. 两种方式加载模型
如何恢复网络模型结构?
方式1 有陷阱(自己定义网络结构,没有用 vgg16 时)
一、神经网络 - 非线性激活
使用到的pytorch网站:
-
Padding Layers(对输入图像进行填充的各种方式)
几乎用不到,nn.ZeroPad2d(在输入tensor数据类型周围用0填充)
nn.ConstantPad2d(用常数填充)
在 Conv2d 中可以实现,故不常用 -
Non-linear Activations (weighted sum, nonlinearity)
-
Non-linear Activations (other)
1.最常见的非线性激活:RELU
ReLU — PyTorch 1.10 documentation

输入:(N,*) N 为 batch_size,*不限制可以是任意
代码举例:RELU
import torch
from torch import nn
from torch.nn import ReLU
input = torch.tensor([[1,-0.5],
[-1,3]])
input = torch.reshape(input,(-1,1,2,2)) #input必须要指定batch_size,-1表示batch_size自己算,1表示是1维的
print(input.shape) #torch.Size([1, 1, 2, 2])
# 搭建神经网络
class Tudui(nn.Module):
def __init__(self):
super(Tudui, self).__init__()
self.relu1 = ReLU() #inplace默认为False
def forward(self,input):
output = self.relu1(input)
return output
# 创建网络
tudui = Tudui()
output = tudui(input)
print(output)2.Sigmoid
Sigmoid — PyTorch 1.10 documentation

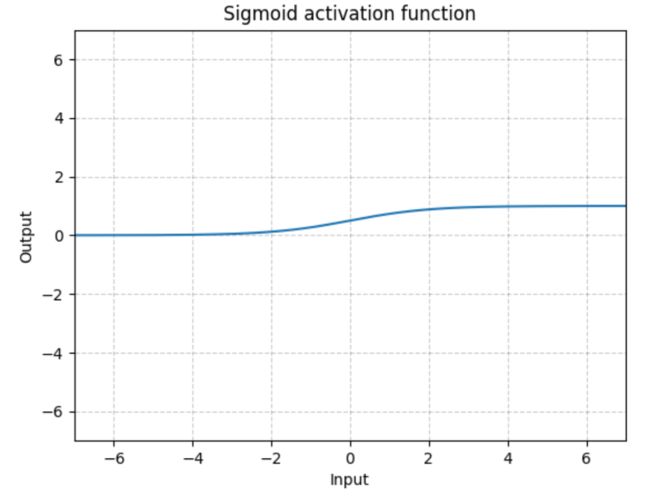
输入:(N,*) N 为 batch_size,*不限制
代码举例:Sigmoid(数据集CIFAR10)
import torch
import torchvision.datasets
from torch import nn
from torch.nn import Sigmoid
from torch.utils.data import DataLoader
from torch.utils.tensorboard import SummaryWriter
dataset = torchvision.datasets.CIFAR10("../data",train=False,download=True,transform=torchvision.transforms.ToTensor())
dataloader = DataLoader(dataset,batch_size=64)
# 搭建神经网络
class Tudui(nn.Module):
def __init__(self):
super(Tudui, self).__init__()
self.sigmoid1 = Sigmoid() #inplace默认为False
def forward(self,input):
output = self.sigmoid1(input)
return output
# 创建网络
tudui = Tudui()
writer = SummaryWriter("../logs_sigmoid")
step = 0
for data in dataloader:
imgs,targets = data
writer.add_images("input",imgs,global_step=step)
output = tudui(imgs)
writer.add_images("output",output,step)
step = step + 1
writer.close()运行后在 terminal 里输入:
tensorboard --logdir=logs_sigmoid打开网址:

关于inplace
二.神经网络 - 线性层及其他层介绍
1.批标准化层--归一化层(不难,自学看官方文档)
Normalization Layers
torch.nn — PyTorch 1.10 documentation
BatchNorm2d — PyTorch 1.10 documentation
对输入采用Batch Normalization,可以加快神经网络的训练速度
CLASS torch.nn.BatchNorm2d(num_features, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True, device=None, dtype=None)
# num_features C-输入的channel# With Learnable Parameters
m = nn.BatchNorm2d(100)
# Without Learnable Parameters
m = nn.BatchNorm2d(100, affine=False) # 正则化层num_feature等于channel,即100
input = torch.randn(20, 100, 35, 45) #batch_size=20,100个channel,35x45的输入
output = m(input)2.Recurrent Layers(特定网络中使用,自学)
RNN、LSTM等,用于文字识别中,特定的网络结构
torch.nn — PyTorch 1.13 documentation
3.Transformer Layers(特定网络中使用,自学)
特定网络结构
torch.nn — PyTorch 1.13 documentation

4.Linear Layers--线性层(本节讲解)--使用较多
网站地址:Linear — PyTorch 1.10 documentation
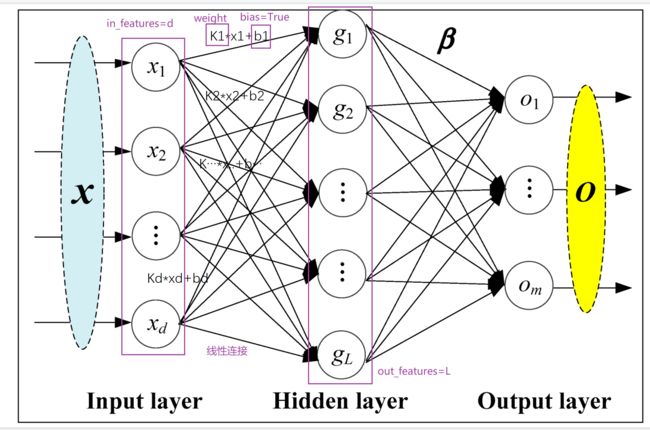
d代表特征数,L代表神经元个数 K和b在训练过程中神经网络会自行调整,以达到比较合理的预测

 5.代码实例 vgg16 model
5.代码实例 vgg16 model

flatten 摊平
torch.flatten — PyTorch 1.10 documentation
# Example
>>> t = torch.tensor([[[1, 2],
[3, 4]],
[[5, 6],
[7, 8]]]) #3个中括号,所以是3维的
>>> torch.flatten(t) #摊平
tensor([1, 2, 3, 4, 5, 6, 7, 8])
>>> torch.flatten(t, start_dim=1) #变为1行
tensor([[1, 2, 3, 4],
[5, 6, 7, 8]])- reshape():可以指定尺寸进行变换
- flatten():变成1行,摊平
output = torch.flatten(imgs)
# 等价于
output = torch.reshape(imgs,(1,1,1,-1))
for data in dataloader:
imgs,targets = data
print(imgs.shape) #torch.Size([64, 3, 32, 32])
output = torch.reshape(imgs,(1,1,1,-1)) # 想把图片展平
print(output.shape) # torch.Size([1, 1, 1, 196608])
output = tudui(output)
print(output.shape) # torch.Size([1, 1, 1, 10])
for data in dataloader:
imgs,targets = data
print(imgs.shape) #torch.Size([64, 3, 32, 32])
output = torch.flatten(imgs) #摊平
print(output.shape) #torch.Size([196608])
output = tudui(output)
print(output.shape) #torch.Size([10])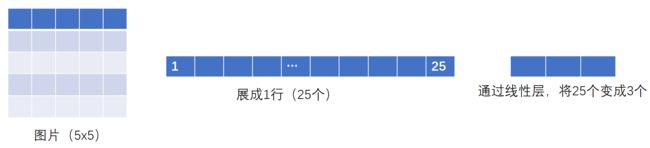
import torch
import torchvision.datasets
from torch import nn
from torch.nn import Linear
from torch.utils.data import DataLoader
dataset = torchvision.datasets.CIFAR10("../data",train=False,transform=torchvision.transforms.ToTensor(),download=True)
dataloader = DataLoader(dataset,batch_size=64,drop_last=True)
class Tudui(nn.Module):
def __init__(self):
super(Tudui, self).__init__()
self.linear1 = Linear(196608,10)
def forward(self,input):
output = self.linear1(input)
return output
tudui = Tudui()
for data in dataloader:
imgs,targets = data
print(imgs.shape) #torch.Size([64, 3, 32, 32])
# output = torch.reshape(imgs,(1,1,1,-1)) # 想把图片展平
# print(output.shape) # torch.Size([1, 1, 1, 196608])
# output = tudui(output)
# print(output.shape) # torch.Size([1, 1, 1, 10])
output = torch.flatten(imgs) #摊平
print(output.shape) #torch.Size([196608])
output = tudui(output)
print(output.shape) #torch.Size([10])运行结果如下:

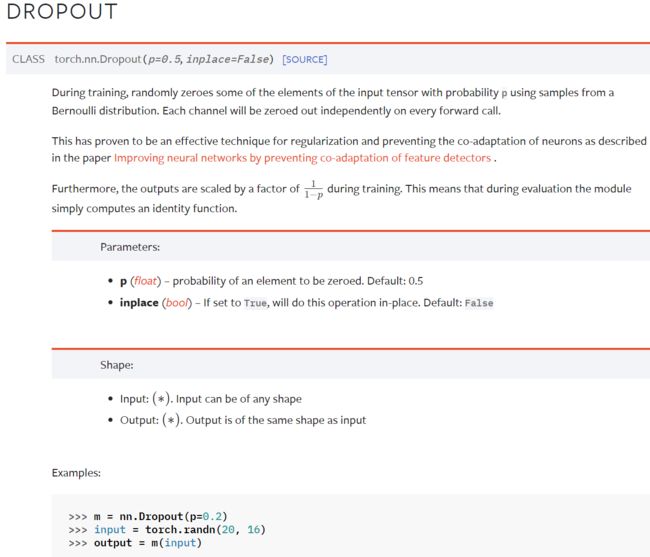
6.Dropout Layers(不难,自学)
Dropout — PyTorch 1.10 documentation
在训练过程中,随机把一些 input(输入的tensor数据类型)中的一些元素变为0,变为0的概率为p
目的:防止过拟合
7.Sparse Layers(特定网络中使用,自学)
Embedding
Embedding — PyTorch 1.10 documentation
用于自然语言处理
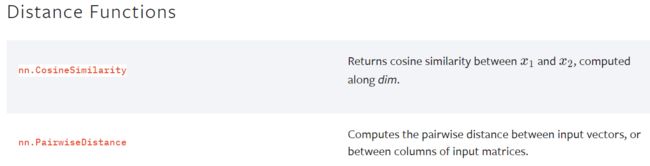
8.Distance Functions
计算两个值之间的误差
torch.nn — PyTorch 1.13 documentation
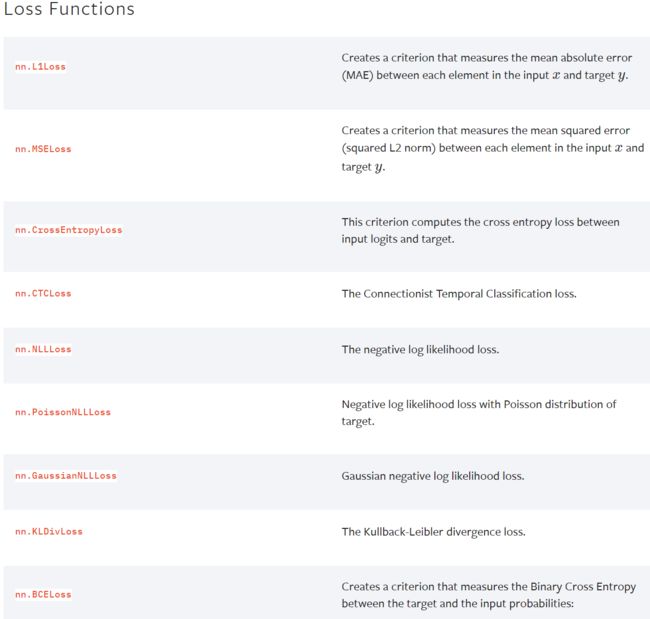
9. Loss Functions
loss 误差大小
torch.nn — PyTorch 1.13 documentation
10. pytorch提供的一些网络模型
- 图片相关:torchvision torchvision.models — Torchvision 0.11.0 documentation
分类、语义分割、目标检测、实例分割、人体关键节点识别(姿态估计)等等
- 文本相关:torchtext 无
- 语音相关:torchaudio torchaudio.models — Torchaudio 0.10.0 documentation
下一节:Container ——> Sequential(序列)
三、神经网络 - 搭建小实战和 Sequential 的使用
Containers中有Module、Sequential等
网站地址 : Sequential — PyTorch 1.10 documentation
Example:
# Using Sequential to create a small model. When `model` is run,
# input will first be passed to `Conv2d(1,20,5)`. The output of
# `Conv2d(1,20,5)` will be used as the input to the first
# `ReLU`; the output of the first `ReLU` will become the input
# for `Conv2d(20,64,5)`. Finally, the output of
# `Conv2d(20,64,5)` will be used as input to the second `ReLU`
model = nn.Sequential(
nn.Conv2d(1,20,5),
nn.ReLU(),
nn.Conv2d(20,64,5),
nn.ReLU()
)
# Using Sequential with OrderedDict. This is functionally the
# same as the above code
model = nn.Sequential(OrderedDict([
('conv1', nn.Conv2d(1,20,5)),
('relu1', nn.ReLU()),
('conv2', nn.Conv2d(20,64,5)),
('relu2', nn.ReLU())
]))好处:代码简洁易懂
1.对 CIFAR10 进行分类的简单神经网络
CIFAR 10:根据图片内容,识别其究竟属于哪一类(10代表有10个类别)
CIFAR-10 and CIFAR-100 datasets

第一次卷积:首先加了几圈 padding(图像大小不变,还是32x32),然后卷积了32次
- Conv2d — PyTorch 1.10 documentation
- 输入尺寸是32x32,经过卷积后尺寸不变,如何设置参数? —— padding=2,stride=1
- 计算公式:

几个卷积核就是几通道的,一个卷积核作用于RGB三个通道后会把得到的三个矩阵的对应值相加,也就是说会合并,所以一个卷积核会产生一个通道
任何卷积核在设置padding的时候为保持输出尺寸不变都是卷积核大小的一半
通道变化时通过调整卷积核的个数(即输出通道)来实现的,在 nn.conv2d 的参数中有 out_channel 这个参数,就是对应输出通道
kernel 的内容是不一样的,可以理解为不同的特征抓取,因此一个核会产生一个channel
直接搭建,实现上图 CIFAR10 model 的代码
from torch import nn
from torch.nn import Conv2d, MaxPool2d, Flatten, Linear
class Tudui(nn.Module):
def __init__(self):
super(Tudui, self).__init__()
self.conv1 = Conv2d(in_channels=3, out_channels=32, kernel_size=5, padding=2) #第一个卷积
self.maxpool1 = MaxPool2d(kernel_size=2) #池化
self.conv2 = Conv2d(32,32,5,padding=2) #维持尺寸不变,所以padding仍为2
self.maxpool2 = MaxPool2d(2)
self.conv3 = Conv2d(32,64,5,padding=2)
self.maxpool3 = MaxPool2d(2)
self.flatten = Flatten() #展平为64x4x4=1024个数据
# 经过两个线性层:第一个线性层(1024为in_features,64为out_features)、第二个线性层(64为in_features,10为out_features)
self.linear1 = Linear(1024,64)
self.linear2 = Linear(64,10) #10为10个类别,若预测的是概率,则取最大概率对应的类别,为该图片网络预测到的类别
def forward(self,x): #x为input
x = self.conv1(x)
x = self.maxpool1(x)
x = self.conv2(x)
x = self.maxpool2(x)
x = self.conv3(x)
x = self.maxpool3(x)
x = self.flatten(x)
x = self.linear1(x)
x = self.linear2(x)
return x
tudui = Tudui()
print(tudui)可以看到网络结构: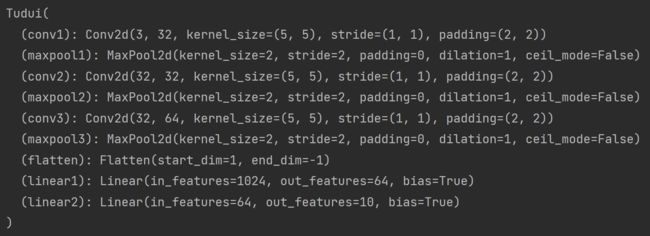
实际过程中如何检查网络的正确性?
核心:一定尺寸的数据经过网络后,能够得到我们想要的输出
对网络结构进行检验的代码:
input = torch.ones((64,3,32,32)) #全是1,batch_size=64,3通道,32x32
output = tudui(input)
print(output.shape)运行结果:
torch.Size([64, 10])若不知道flatten之后的维度是多少该怎么办?
from torch import nn
from torch.nn import Conv2d, MaxPool2d, Flatten, Linear
class Tudui(nn.Module):
def __init__(self):
super(Tudui, self).__init__()
self.conv1 = Conv2d(in_channels=3, out_channels=32, kernel_size=5, padding=2) #第一个卷积
self.maxpool1 = MaxPool2d(kernel_size=2) #池化
self.conv2 = Conv2d(32,32,5,padding=2) #维持尺寸不变,所以padding仍为2
self.maxpool2 = MaxPool2d(2)
self.conv3 = Conv2d(32,64,5,padding=2)
self.maxpool3 = MaxPool2d(2)
self.flatten = Flatten() #展平为64x4x4=1024个数据
# 经过两个线性层:第一个线性层(1024为in_features,64为out_features)、第二个线性层(64为in_features,10为out_features)
self.linear1 = Linear(1024,64)
self.linear2 = Linear(64,10) #10为10个类别,若预测的是概率,则取最大概率对应的类别,为该图片网络预测到的类别
def forward(self,x): #x为input
x = self.conv1(x)
x = self.maxpool1(x)
x = self.conv2(x)
x = self.maxpool2(x)
x = self.conv3(x)
x = self.maxpool3(x)
x = self.flatten(x)
return x
tudui = Tudui()
print(tudui)
input = torch.ones((64,3,32,32)) #全是1,batch_size=64(64张图片),3通道,32x32
output = tudui(input)
print(output.shape) # torch.Size([64,1024])看到输出的维度是(64,1024),64可以理解为64张图片,1024就是flatten之后的维度了
运行结果:
用 Sequential 搭建,实现上图 CIFAR10 model 的代码
作用:代码更加简洁
import torch
from torch import nn
from torch.nn import Conv2d, MaxPool2d, Flatten, Linear, Sequential
class Tudui(nn.Module):
def __init__(self):
super(Tudui, self).__init__()
self.model1 = Sequential(
Conv2d(3,32,5,padding=2),
MaxPool2d(2),
Conv2d(32,32,5,padding=2),
MaxPool2d(2),
Conv2d(32,64,5,padding=2),
MaxPool2d(2),
Flatten(),
Linear(1024,64),
Linear(64,10)
)
def forward(self,x): #x为input
x = self.model1(x)
return x
tudui = Tudui()
print(tudui)
input = torch.ones((64,3,32,32)) #全是1,batch_size=64,3通道,32x32
output = tudui(input)
print(output.shape)运行结果:

2.引入 tensorboard 可视化模型结构
在上述代码后面加上以下代码:
from torch.utils.tensorboard import SummaryWriter
writer = SummaryWriter("../logs_seq")
writer.add_graph(tudui,input) # add_graph 计算图
writer.close()运行后在 terminal 里输入:
tensorboard --logdir=logs_seq打开网址,双击图片中的矩形,可以放大每个部分:

四、损失函数与反向传播
torch.nn 里的 loss function 衡量误差,在使用过程中根据需求使用,注意输入形状和输出形状即可
loss 衡量实际神经网络输出 output 与真实想要结果 target 的差距,越小越好
作用:
- 1. 计算实际输出和目标之间的差距
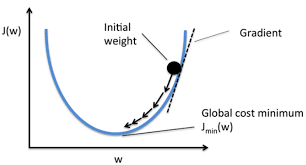
- 2. 为我们更新输出提供一定的依据(反向传播):给每一个卷积核中的参数提供了梯度 grad,采用反向传播时,每一个要更新的参数都会计算出对应的梯度,优化过程中根据梯度对参数进行优化,最终达到整个 loss 进行降低的目的
梯度下降法:
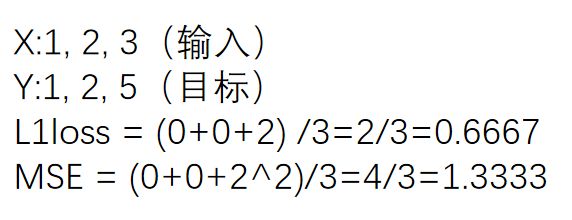
1. L1LOSS

input:(N,*) N是batch_size,即有多少个数据;*可以是任意维度
CLASS torch.nn.L1Loss(size_average=None, reduce=None, reduction='mean')小例子:

代码
import torch
from torch.nn import L1Loss
# 实际数据或网络默认情况下就是float类型,不写测试案例的话一般不需要加dtype
inputs = torch.tensor([1,2,3],dtype=torch.float32) # 计算时要求数据类型为浮点数,不能是整型的long
targets = torch.tensor([1,2,5],dtype=torch.float32)
inputs = torch.reshape(inputs,(1,1,1,3)) # 1 batch_size, 1 channel, 1行3列
targets = torch.reshape(targets,(1,1,1,3))
loss = L1Loss()
result = loss(inputs,targets)
print(result)运行结果:
tensor(0.6667)求和的方式:
修改上述代码中的一句即可
loss = L1Loss(reduction='sum')运行结果:
tensor(2.)2.MSELOSS(均方误差)
input:(N,*) N是batch_size,即有多少个数据;*可以是任意维度
CLASS torch.nn.MSELoss(size_average=None, reduce=None, reduction='mean')
代码:
import torch
from torch import nn
# 实际数据或网络默认情况下就是float类型,不写测试案例的话一般不需要加dtype
inputs = torch.tensor([1,2,3],dtype=torch.float32) # 计算时要求数据类型为浮点数,不能是整型的long
targets = torch.tensor([1,2,5],dtype=torch.float32)
inputs = torch.reshape(inputs,(1,1,1,3)) # 1 batch_size, 1 channel, 1行3列
targets = torch.reshape(targets,(1,1,1,3))
loss_mse = nn.MSELoss()
result_mse = loss_mse(inputs,targets)
print(result_mse)结果:

上述代码的例子:
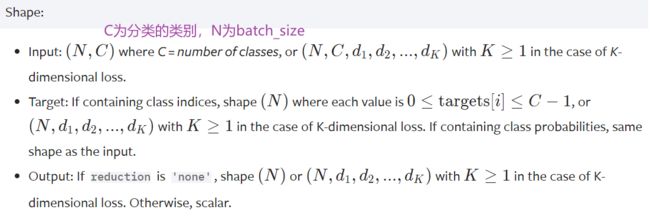
3. CROSSENTROPYLOSS(交叉熵)
适用于训练分类问题,有C个类别
例:三分类问题,person,dog,cat
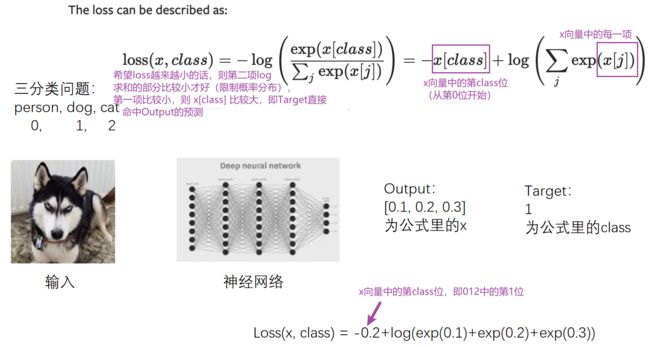
(公式中的 log 可以按 ln 算)
这里的output不是概率,是评估分数
代码:
x = torch.tensor([0.1,0.2,0.3])
y = torch.tensor([1])
x = torch.reshape(x,(1,3))
loss_cross = nn.CrossEntropyLoss()
result_cross = loss_cross(x,y)
print(result_cross)结果:
tensor(1.1019)3.如何在之前写的神经网络中用到 Loss Function(损失函数)
import torchvision.datasets
from torch import nn
from torch.nn import Conv2d, MaxPool2d, Flatten, Linear, Sequential
from torch.utils.data import DataLoader
dataset = torchvision.datasets.CIFAR10("../data",train=False,transform=torchvision.transforms.ToTensor(),download=True)
dataloader = DataLoader(dataset,batch_size=1)
class Tudui(nn.Module):
def __init__(self):
super(Tudui, self).__init__()
self.model1 = Sequential(
Conv2d(3,32,5,padding=2),
MaxPool2d(2),
Conv2d(32,32,5,padding=2),
MaxPool2d(2),
Conv2d(32,64,5,padding=2),
MaxPool2d(2),
Flatten(),
Linear(1024,64),
Linear(64,10)
)
def forward(self,x): # x为input
x = self.model1(x)
return x
loss = nn.CrossEntropyLoss()
tudui = Tudui()
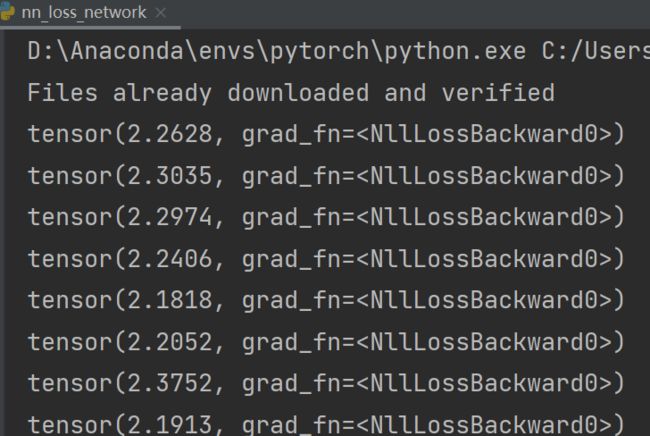
for data in dataloader:
imgs,targets = data # imgs为输入,放入神经网络中
outputs = tudui(imgs) # outputs为输入通过神经网络得到的输出,targets为实际输出
result_loss = loss(outputs,targets)
print(result_loss) # 神经网络输出与真实输出的误差结果:
5. backward 反向传播
计算出每一个节点参数的梯度
在上述代码后加一行:
result_loss.backward() # backward反向传播,是对result_loss,而不是对loss在这一句代码前打上断点(运行到该行代码的前一行,该行不运行),debug 后:
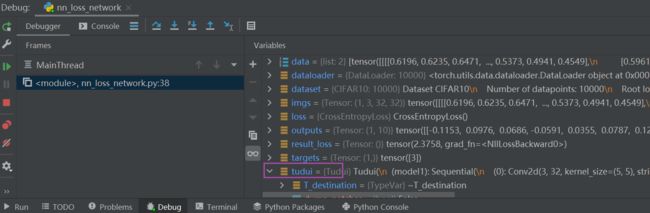
tudui ——> model 1 ——> Protected Attributes ——> _modules ——> '0' ——> bias / weight——> grad(是None)
点击Step into My Code,运行完该行后,可以发现刚刚的None有值了(损失函数一定要经过 .backward() 后才能反向传播,才能有每个需要调节的参数的grad的值)
下一节:选择合适的优化器,利用梯度对网络中的参数进行优化更新,以达到整个 loss最低的目的
五、优化器
当使用损失函数时,可以调用损失函数的 backward,得到反向传播,反向传播可以求出每个需要调节的参数对应的梯度,有了梯度就可以利用优化器,优化器根据梯度对参数进行调整,以达到整体误差降低的目的。
网站 : torch.optim — PyTorch 1.10 documentation
1.如何使用优化器?
(1)构造
# Example:
# SGD为构造优化器的算法,Stochastic Gradient Descent 随机梯度下降
optimizer = optim.SGD(model.parameters(), lr=0.01, momentum=0.9) #模型参数、学习速率、特定优化器算法中需要设定的参数
optimizer = optim.Adam([var1, var2], lr=0.0001)(2)调用优化器的step方法
利用之前得到的梯度对参数进行更新
for input, target in dataset:
optimizer.zero_grad() #把上一步训练的每个参数的梯度清零
output = model(input)
loss = loss_fn(output, target) # 输出跟真实的target计算loss
loss.backward() #调用反向传播得到每个要更新参数的梯度
optimizer.step() #每个参数根据上一步得到的梯度进行优化算法
如Adadelta、Adagrad、Adam、RMSProp、SGD等等,不同算法前两个参数:params、lr 都是一致的,后面的参数不同
CLASS torch.optim.Adadelta(params, lr=1.0, rho=0.9, eps=1e-06, weight_decay=0)
# params为模型的参数、lr为学习速率(learning rate)
# 后续参数都是特定算法中需要设置的学习速率不能太大(太大模型训练不稳定)也不能太小(太小模型训练慢),一般建议先采用较大学习速率,后采用较小学习速率
SGD为例
以 SGD(随机梯度下降法)为例进行说明:
import torch
import torchvision.datasets
from torch import nn
from torch.nn import Conv2d, MaxPool2d, Flatten, Linear, Sequential
from torch.utils.data import DataLoader
# 加载数据集并转为tensor数据类型
dataset = torchvision.datasets.CIFAR10("../data",train=False,transform=torchvision.transforms.ToTensor(),download=True)
# 加载数据集
dataloader = DataLoader(dataset,batch_size=1)
# 创建网络名叫Tudui
class Tudui(nn.Module):
def __init__(self):
super(Tudui, self).__init__()
self.model1 = Sequential(
Conv2d(3,32,5,padding=2),
MaxPool2d(2),
Conv2d(32,32,5,padding=2),
MaxPool2d(2),
Conv2d(32,64,5,padding=2),
MaxPool2d(2),
Flatten(),
Linear(1024,64),
Linear(64,10)
)
def forward(self,x): # x为input,forward前向传播
x = self.model1(x)
return x
# 计算loss
loss = nn.CrossEntropyLoss()
# 搭建网络
tudui = Tudui()
# 设置优化器
optim = torch.optim.SGD(tudui.parameters(),lr=0.01) # SGD随机梯度下降法
for data in dataloader:
imgs,targets = data # imgs为输入,放入神经网络中
outputs = tudui(imgs) # outputs为输入通过神经网络得到的输出,targets为实际输出
result_loss = loss(outputs,targets)
optim.zero_grad() # 把网络模型中每一个可以调节的参数对应梯度设置为0
result_loss.backward() # backward反向传播求出每一个节点的梯度,是对result_loss,而不是对loss
optim.step() # 对每个参数进行调优可以在以下地方打断点,debug:

tudui ——> Protected Attributes ——> _modules ——> 'model1' ——> Protected Attributes ——> _modules ——> '0' ——> weight ——> data 或 grad
通过每次按箭头所指的按钮(点一次运行一行),观察 data 和 grad 值的变化
- 第一行 optim.zero_grad() 是让grad清零
- 第三行 optim.step() 会通过grad更新data

完整代码
在 data 循环外又套一层 epoch 循环,一次 data 循环相当于对数据训练一次,加了 epoch 循环相当于对数据训练 20 次
import torch
import torchvision.datasets
from torch import nn
from torch.nn import Conv2d, MaxPool2d, Flatten, Linear, Sequential
from torch.utils.data import DataLoader
# 加载数据集并转为tensor数据类型
dataset = torchvision.datasets.CIFAR10("../data",train=False,transform=torchvision.transforms.ToTensor(),download=True)
dataloader = DataLoader(dataset,batch_size=1)
# 创建网络名叫Tudui
class Tudui(nn.Module):
def __init__(self):
super(Tudui, self).__init__()
self.model1 = Sequential(
Conv2d(3,32,5,padding=2),
MaxPool2d(2),
Conv2d(32,32,5,padding=2),
MaxPool2d(2),
Conv2d(32,64,5,padding=2),
MaxPool2d(2),
Flatten(),
Linear(1024,64),
Linear(64,10)
)
def forward(self,x): # x为input,forward前向传播
x = self.model1(x)
return x
# 计算loss
loss = nn.CrossEntropyLoss()
# 搭建网络
tudui = Tudui()
# 设置优化器
optim = torch.optim.SGD(tudui.parameters(),lr=0.01) # SGD随机梯度下降法
for epoch in range(20):
running_loss = 0.0 # 在每一轮开始前将loss设置为0
for data in dataloader: # 该循环相当于只对数据进行了一轮学习
imgs,targets = data # imgs为输入,放入神经网络中
outputs = tudui(imgs) # outputs为输入通过神经网络得到的输出,targets为实际输出
result_loss = loss(outputs,targets)
optim.zero_grad() # 把网络模型中每一个可以调节的参数对应梯度设置为0
result_loss.backward() # backward反向传播求出每一个节点的梯度,是对result_loss,而不是对loss
optim.step() # 对每个参数进行调优
running_loss = running_loss + result_loss # 每一轮所有loss的和
print(running_loss)部分运行结果:

优化器对模型参数不断进行优化,每一轮的 loss 在不断减小
实际过程中模型在整个数据集上的训练次数(即最外层的循环)都是成百上千/万的,本例仅以 20 次为例。
六、现有网络模型的使用及修改
本节主要讲解 torchvision

本节主要讲解 Classification 里的 VGG 模型,数据集仍为 CIFAR10 数据集(主要用于分类)
网站 : torchvision.models — Torchvision 0.11.0 documentation
1.数据集 ImageNet
注意:必须要先有 package scipy
在 Terminal 里输入
pip list寻找是否有 scipy,若没有的话输入
pip install scipy(注意关闭代理)
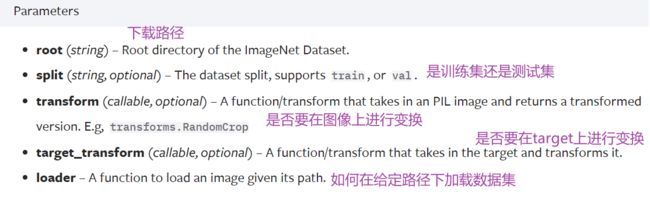
参数及下载
1.参数:
2.下载 ImageNet 数据集:
import torchvision.datasets
train_data = torchvision.datasets.ImageNet("../data_image_net",split='train',download=True,
transform=torchvision.transforms.ToTensor())./xxx表示当前路径下,../xxx表示返回上一级目录
多行注释快捷键:ctrl+/
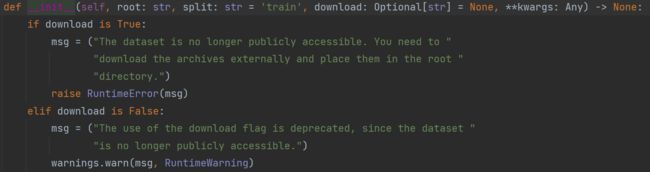
运行后会报错:
RuntimeError: The dataset is no longer publicly accessible. You need to download the archives externally and place them in the root directory.
下载地址:
Imagenet 完整数据集下载_wendell 的博客-CSDN博客_imagenet下载
100 多个G,太大... 放弃
按住 Ctrl 键,点击 ImageNet,查看其源码:
2.VGG16 模型
VGG 11/13/16/19 常用16和19
(1)参数
参数 pretrained=True/False

- pretrained 为 False 的情况下,只是加载网络模型,参数都为默认参数,不需要下载
- 为 True 时需要从网络中下载,卷积层、池化层对应的参数等等(在ImageNet数据集中训练好的)
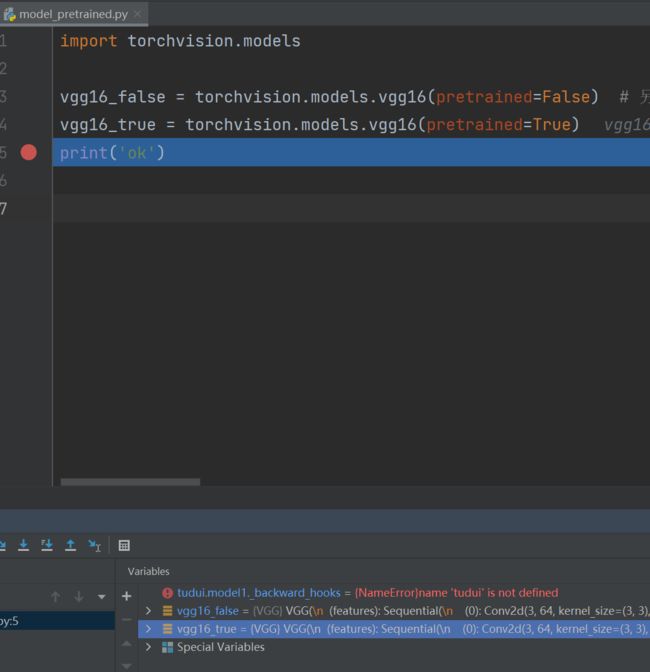
import torchvision.models
vgg16_false = torchvision.models.vgg16(pretrained=False) # 另一个参数progress显示进度条,默认为True
vgg16_true = torchvision.models.vgg16(pretrained=True)
print('ok')断点打在 print('ok') 前,debug 一下,结果如图:
vgg16_true ——> classifier ——> Protected Attributes ——> modules ——> '0'(线性层) ——> weight

为 false 的情况,同理找到 weight 值:
![]()
总结:
- 设置为 False 的情况,相当于网络模型中的参数都是初始化的、默认的
- 设置为 True 时,网络模型中的参数在数据集上是训练好的,能达到比较好的效果
(2)vgg16 网络架构
import torchvision.models
vgg16_false = torchvision.models.vgg16(pretrained=False) # 另一个参数progress显示进度条,默认为True
vgg16_true = torchvision.models.vgg16(pretrained=True)
print(vgg16_true)输出:
VGG(
(features): Sequential(
# 输入图片先经过卷积,输入是3通道的、输出是64通道的,卷积核大小是3×3的
(0): Conv2d(3, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
# 非线性
(1): ReLU(inplace=True)
# 卷积、非线性、池化...
(2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(3): ReLU(inplace=True)
(4): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(5): Conv2d(64, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(6): ReLU(inplace=True)
(7): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(8): ReLU(inplace=True)
(9): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(10): Conv2d(128, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(11): ReLU(inplace=True)
(12): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(13): ReLU(inplace=True)
(14): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(15): ReLU(inplace=True)
(16): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(17): Conv2d(256, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(18): ReLU(inplace=True)
(19): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(20): ReLU(inplace=True)
(21): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(22): ReLU(inplace=True)
(23): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(24): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(25): ReLU(inplace=True)
(26): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(27): ReLU(inplace=True)
(28): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(29): ReLU(inplace=True)
(30): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(avgpool): AdaptiveAvgPool2d(output_size=(7, 7))
(classifier): Sequential(
(0): Linear(in_features=25088, out_features=4096, bias=True)
(1): ReLU(inplace=True)
(2): Dropout(p=0.5, inplace=False)
(3): Linear(in_features=4096, out_features=4096, bias=True)
(4): ReLU(inplace=True)
(5): Dropout(p=0.5, inplace=False)
# 最后线性层输出为1000(vgg16也是一个分类模型,能分出1000个类别)
(6): Linear(in_features=4096, out_features=1000, bias=True)
)
)ImageNet

所以 out_features = 1000
3.如何利用现有网络去改动它的结构?
train_data = torchvision.datasets.CIFAR10(root="./dataset",train=True,transform=torchvision.transforms.ToTensor(),download=True)CIFAR10 把数据分成了10类,而 vgg16 模型把数据分成了 1000 类,如何应用这个网络模型呢?
- 1. 把最后线性层的 out_features 从1000改为10
- 2. 在最后的线性层下面再加一层,in_features为1000,out_features为10
利用现有网络去改动它的结构,避免写 vgg16
很多框架会把 vgg16 当做前置的网络结构,提取一些特殊的特征,再在后面加一些网络结构,实现功能。
(1)添加
以 vgg16_true 为例讲解,实现上面的第二种思路:
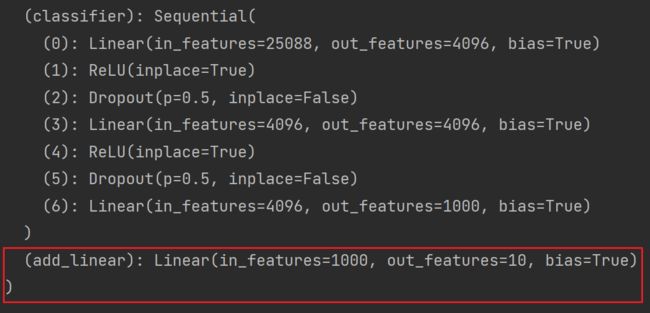
# 给 vgg16 添加一个线性层,输入1000个类别,输出10个类别
vgg16_true.add_module('add_linear',nn.Linear(in_features=1000,out_features=10))
print(vgg16_true)结果如图:
如果想将 module 添加至 classifier 里:
# 给 vgg16 添加一个线性层,输入1000个类别,输出10个类别
vgg16_true.classifier.add_module('add_linear',nn.Linear(in_features=1000,out_features=10))
print(vgg16_true)结果如图:

(2)修改
以上为添加,那么如何修改呢?
以 vgg16_false 为例:
vgg16_false = torchvision.models.vgg16(pretrained=False) # 另一个参数progress显示进度条,默认为True
print(vgg16_false)结果如下:
(classifier): Sequential(
(0): Linear(in_features=25088, out_features=4096, bias=True)
(1): ReLU(inplace=True)
(2): Dropout(p=0.5, inplace=False)
(3): Linear(in_features=4096, out_features=4096, bias=True)
(4): ReLU(inplace=True)
(5): Dropout(p=0.5, inplace=False)
(6): Linear(in_features=4096, out_features=1000, bias=True)
)
)想将最后一层 Linear 的 out_features 改为10:
vgg16_false.classifier[6] = nn.Linear(4096,10)
print(vgg16_false)结果如下:

本节:
- 如何加载现有的一些 pytorch 提供的网络模型
- 如何对网络模型中的结构进行修改,包括添加自己想要的一些网络模型结构
七、网络模型的保存与读取
后续内容:

1.两种方式保存模型
import torch
import torchvision.models
vgg16 = torchvision.models.vgg16(pretrained=False) # 网络中模型的参数是没有经过训练的、初始化的参数方式1:不仅保存了网络模型的结构,也保存了网络模型的参数
# 保存方式1:模型结构+模型参数
torch.save(vgg16,"vgg16_method1.pth")方式2:网络模型的参数保存为字典,不保存网络模型的结构(官方推荐的保存方式,用的空间小)
# 保存方式2:模型参数(官方推荐)
torch.save(vgg16.state_dict(),"vgg16_method2.pth")
# 把vgg16的状态保存为字典形式(Python中的一种数据格式)运行后 src 文件夹底下会多出以下两个文件:

2. 两种方式加载模型
方式1:对应保存方式1,打印出的是网络模型的结构
# 方式1 对应 保存方式1,加载模型
model = torch.load("vgg16_method1.pth",)
print(model) # 打印出的只是模型的结构,其实它的参数也被保存下来了
(保存的是网络模型的结构)
在print这句打上断点,debug一下,可以看一下模型参数
方式2:对应保存方式2,打印出的是参数的字典形式
# 方式2 加载模型
model = torch.load("vgg16_method2.pth")
print(model)
( 保存的是参数的字典形式,不再是网络模型)
如何恢复网络模型结构?
import torchvision.models
vgg16 = torchvision.models.vgg16(pretrained=False) # 预训练设置为False
vgg16.load_state_dict(torch.load("vgg16_method2.pth")) # vgg16通过字典形式,加载状态即参数
print(vgg16)
方式1 有陷阱(自己定义网络结构,没有用 vgg16 时)
用方式1保存的话,加载时要让程序能够访问到其定义模型的一种方式
问题描述
首先在 model_save.py 中写以下代码:
# 陷阱
from torch import nn
class Tudui(nn.Module):
def __init__(self):
super(Tudui, self).__init__()
self.conv = nn.Conv2d(3,64,kernel_size=3)
def forward(self,x): # x为输入
x = self.conv(x)
return x
tudui = Tudui() # 有一个卷积层和一些初始化的参数
torch.save(tudui,"tudui_method1.pth")运行后 src 文件夹底下多出一个文件:
![]()
再在 model_load.py 中写以下代码:
# 陷阱
import torch
model = torch.load("tudui_method1.pth")
print(model)运行后发现报错:
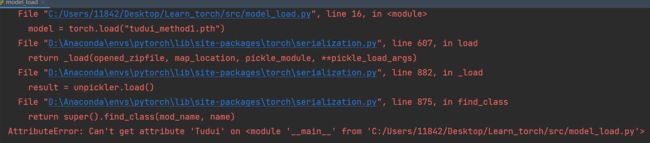
解决:
还是需要将 model_save.py 中的网络结构复制到 model_load.py 中,即下列代码需要复制到 model_load.py 中(为了确保加载的网络模型是想要的网络模型):
class Tudui(nn.Module):
def __init__(self):
super(Tudui, self).__init__()
self.conv = nn.Conv2d(3,64,kernel_size=3)
def forward(self,x): # x为输入
x = self.conv(x)
return x但是不需要创建了,即在 model_load.py 中不需要写:
tudui = Tudui()此时 model_load.py 完整代码为:
# 陷阱
class Tudui(nn.Module):
def __init__(self):
super(Tudui, self).__init__()
self.conv = nn.Conv2d(3,64,kernel_size=3)
def forward(self,x): # x为输入
x = self.conv(x)
return x
model = torch.load("tudui_method1.pth")
print(model)运行结果如下:

解决另法:
实际写项目过程中,直接定义在一个单独的文件中(如model_save.py),再在 model_load.py 中:
from model_save import *今天这篇课程的学习和总结到这里就结束啦,如果有什么问题可以在评论区留言呀~
如果帮助到大家,可以一键三连+关注支持下~
学习系列笔记:
【我是土堆 - Pytorch教程】 知识点 学习总结笔记(一)_耿鬼喝椰汁的博客-CSDN博客
【我是土堆 - Pytorch教程】 知识点 学习总结笔记(二)_耿鬼喝椰汁的博客-CSDN博客
【我是土堆 - Pytorch教程】 知识点 学习总结笔记(三)_耿鬼喝椰汁的博客-CSDN博客