Ubuntu系统安装ROS & 实现小海龟仿真
目录
- 前言
- 一、ROS安装
-
- 1.添加ROS软件源:
- 2.添加密钥:
- 3.安装ROS
- 4.初始化rosdep
- 5.设置环境变量
- 6.安装rosinstall
- 二、ROS第一个例程——小海龟
-
- 1.新建一个终端运行ROS
- 2.新建一个终端启动小海龟的仿真器
- 3.新建一个启动海龟控制节点
- 三、话题查看器查看两个node之间的消息传递
- 四、C++写一个程序,控制小海龟走一个圆形
-
- 1.Workspace创建
- 2.设置环境变量
- 3.创建功能包:
- 4.编译
- 5.运行程序
- 五、总结
前言
ROS (Robot Operating System, 机器人操作系统)
提供一系列程序库和工具以帮助软件开发者创建机器人应用软件。它提供了硬件抽象、设备驱动、库函数、可视化、消息传递和软件包管理等诸多功能。
一、ROS安装
1.添加ROS软件源:
sudo sh -c ‘echo “deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main” > /etc/apt/sources.list.d/ros-latest.list’
2.添加密钥:
sudo apt-key adv --keyserver ‘hkp://keyserver.ubuntu.com:80’ --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654

3.安装ROS
sudo apt update
sudo apt-get install ros-melodic-desktop-full

说明:
需要根据Ubuntu的版本选择合适的ROS版本。否则会出现Unable to locate package ros-kinetic-desktop-full的错误。ROS的版本主要有Melodic、Lunar、Kinetic版本,根据linux系统不同选择合适的版本,报错也就解决了。安装时间比较长。
4.初始化rosdep
sudo rosdep init
rosdep update

中途可能会出现一定错误,可参考:https://blog.csdn.net/qq_52215423/article/details/129331888
5.设置环境变量
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
6.安装rosinstall
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
**
到此,ROS安装完成
**
二、ROS第一个例程——小海龟
1.新建一个终端运行ROS
roscore
2.新建一个终端启动小海龟的仿真器
rosrun turtlesim turtlesim_node
3.新建一个启动海龟控制节点
rosrun turtlesim turtle_teleop_key
每个步骤分明需要打开一个终端,小海龟的运行路径是在最后一个终端上,通过上下左右按键控制的。

三、话题查看器查看两个node之间的消息传递
在上面的三个终端运行的时候,再新建一个终端输入下面的命令查看话题:
rqt_graph
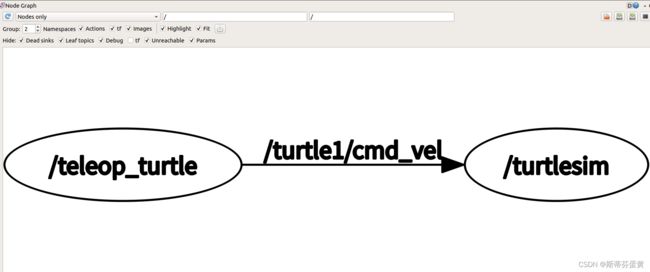
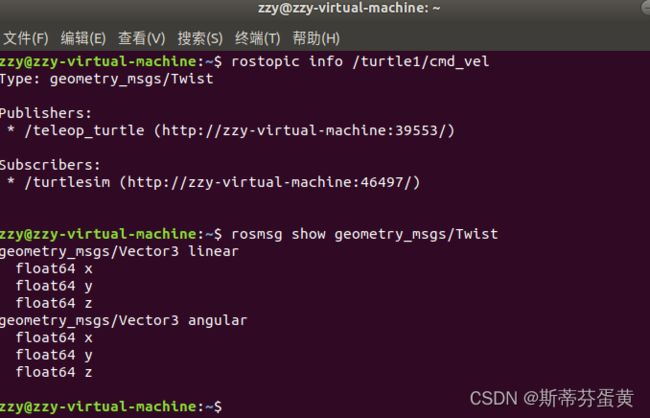
输出话题的内容:
rostopic info /turtle1/cmd_vel
查看自定义类型有什么:
rosmsg show geometry_msgs/Twist
四、C++写一个程序,控制小海龟走一个圆形
1.Workspace创建
1.新建一个文件夹,命名为catkin_ws
2.在文件夹 catkin_ws 下创建一个文件夹 src
3.移动到src目录下输入catkin_init_workspace。在src文件夹中出现CMakeLists.txt文件
4.返回catkin_ws,对其进行编译
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspace
cd ~/catkin_ws
catkin_make
2.设置环境变量
设置环境变量是为了让系统知道功能包的位置在哪,以便能找到。确保安装脚本正确地覆盖了工作空间,ROS_PACKAGE_PATH环境变量包含在目录中。
source devel/setup.bash
检查环境变量
查看当前环境变量,终端输入echo $ROS_PACKAGE_PATH
3.创建功能包:
来到workspace的src目录下,新建my_turtle_package包
cd ./src
catkin_create_pkg my_turtle_package std_msgs rospy roscpp
进入my_turtle_package的src文件中
cd src
新建画圆程序名为yuan.cpp
touch yuan.cpp
打开yuan.cpp
gedit yuan.cpp

代码:
#include "ros/ros.h"
#include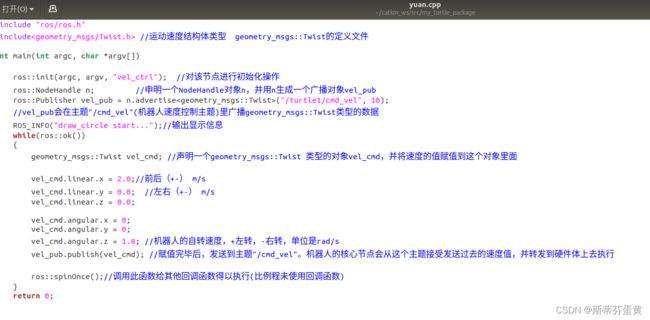
记得保存文件再退出
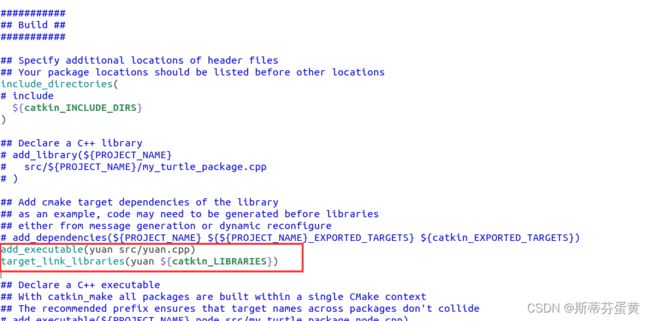
修改CMakeLists.txt文件内容
返回my_turtle_package,打开CMakeLists.txt文件
在CMakeLists.txt文件中找到##Declare a C++ executable,在这一行的前面添加如下内容:
add_executable(yuan src/yuan.cpp)
target_link_libraries(yuan ${catkin_LIBRARIES})
4.编译
cd ~/catkin_ws/
catkin_make
5.运行程序
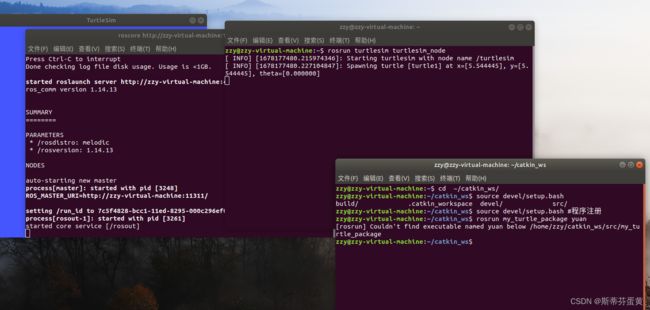
1.新建一个终端运行ROS
roscore
2.新建一个终端启动小海龟的仿真器
rosrun turtlesim turtlesim_node
3.新建一个启动海龟控制节点
cd ~/catkin_ws/
source devel/setup.bash #程序注册
rosrun my_turtle_package yuan

五、总结
这是第一次安装ROS,安装中途还是有一些问题的,比如网络较差,ubuntu版本不一致,但是最终还是解决了。如果电脑安装ROS有问题的,可以采用直接导入Ubuntu18+ROS 镜像的方式,节约时间。镜像文件很大,约7GB,请从百度网盘下载 。https://pan.baidu.com/s/15CG3mXpxpqAYeBafS-vc8w 提取码:2022